 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformers meet Neural Algorithmic Reasoners
Jun 13, 2024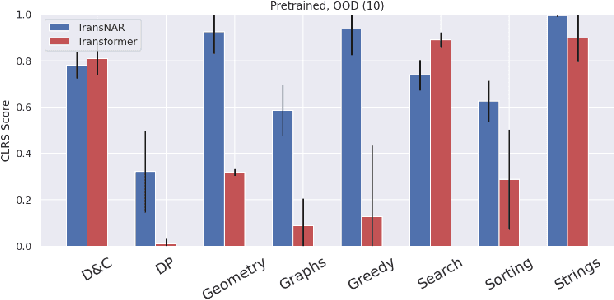
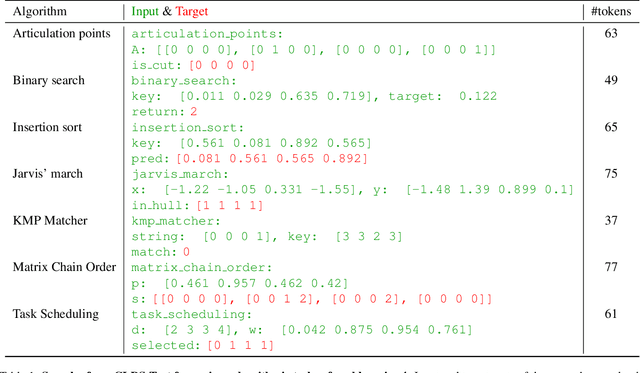
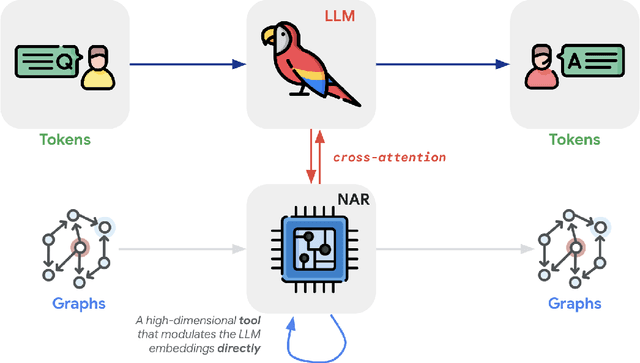
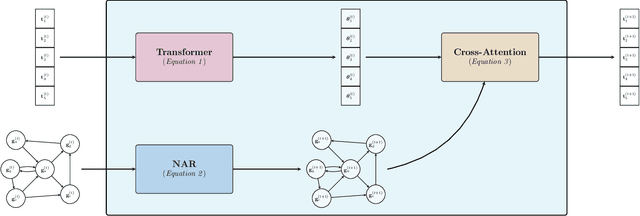
Transformers have revolutionized machine learning with their simple yet effective architecture. Pre-training Transformers on massive text datasets from the Internet has led to unmatched generalization for natural language understanding (NLU) tasks. However, such language models remain fragile when tasked with algorithmic forms of reasoning, where computations must be precise and robust. To address this limitation, we propose a novel approach that combines the Transformer's language understanding with the robustness of graph neural network (GNN)-based neural algorithmic reasoners (NARs). Such NARs proved effective as generic solvers for algorithmic tasks, when specified in graph form. To make their embeddings accessible to a Transformer, we propose a hybrid architecture with a two-phase training procedure, allowing the tokens in the language model to cross-attend to the node embeddings from the NAR. We evaluate our resulting TransNAR model on CLRS-Text, the text-based version of the CLRS-30 benchmark, and demonstrate significant gains over Transformer-only models for algorithmic reasoning, both in and out of distribution.
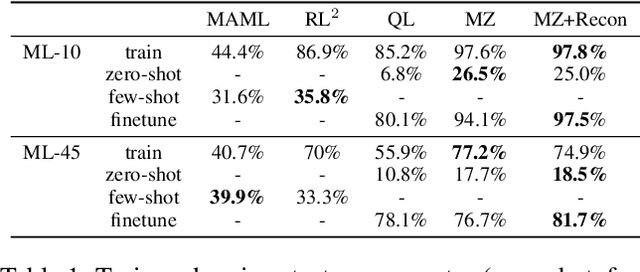
Investigating the role of model-based learning in exploration and transfer
Feb 08, 2023State of the art reinforcement learning has enabled training agents on tasks of ever increasing complexity. However, the current paradigm tends to favor training agents from scratch on every new task or on collections of tasks with a view towards generalizing to novel task configurations. The former suffers from poor data efficiency while the latter is difficult when test tasks are out-of-distribution. Agents that can effectively transfer their knowledge about the world pose a potential solution to these issues. In this paper, we investigate transfer learning in the context of model-based agents. Specifically, we aim to understand when exactly environment models have an advantage and why. We find that a model-based approach outperforms controlled model-free baselines for transfer learning. Through ablations, we show that both the policy and dynamics model learnt through exploration matter for successful transfer. We demonstrate our results across three domains which vary in their requirements for transfer: in-distribution procedural (Crafter), in-distribution identical (RoboDesk), and out-of-distribution (Meta-World). Our results show that intrinsic exploration combined with environment models present a viable direction towards agents that are self-supervised and able to generalize to novel reward functions.
Towards Understanding How Machines Can Learn Causal Overhypotheses
Jun 16, 2022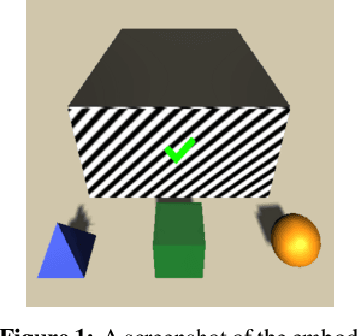

Recent work in machine learning and cognitive science has suggested that understanding causal information is essential to the development of intelligence. The extensive literature in cognitive science using the ``blicket detector'' environment shows that children are adept at many kinds of causal inference and learning. We propose to adapt that environment for machine learning agents. One of the key challenges for current machine learning algorithms is modeling and understanding causal overhypotheses: transferable abstract hypotheses about sets of causal relationships. In contrast, even young children spontaneously learn and use causal overhypotheses. In this work, we present a new benchmark -- a flexible environment which allows for the evaluation of existing techniques under variable causal overhypotheses -- and demonstrate that many existing state-of-the-art methods have trouble generalizing in this environment. The code and resources for this benchmark are available at https://github.com/CannyLab/casual_overhypotheses.
Procedural Generalization by Planning with Self-Supervised World Models
Nov 02, 2021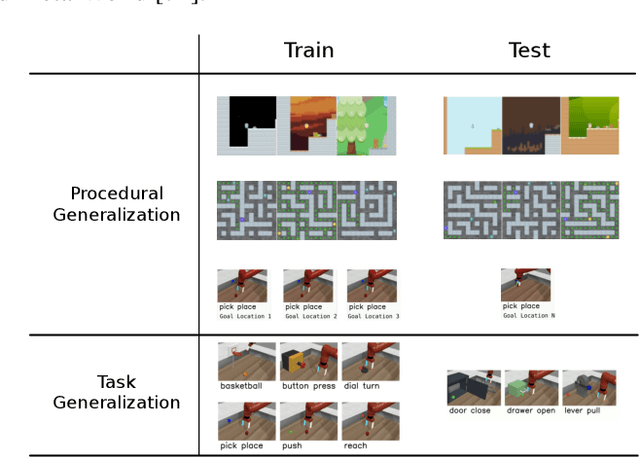
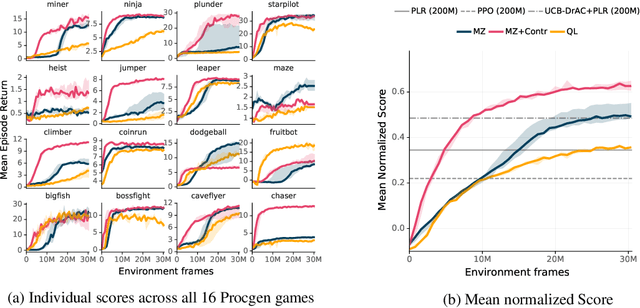
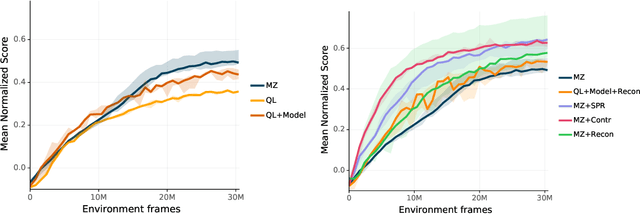
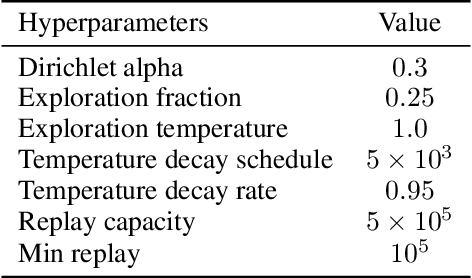
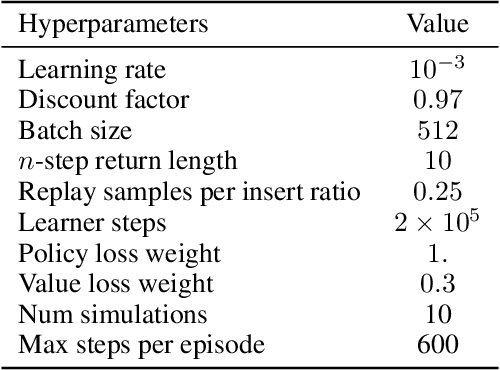
One of the key promises of model-based reinforcement learning is the ability to generalize using an internal model of the world to make predictions in novel environments and tasks. However, the generalization ability of model-based agents is not well understood because existing work has focused on model-free agents when benchmarking generalization. Here, we explicitly measure the generalization ability of model-based agents in comparison to their model-free counterparts. We focus our analysis on MuZero (Schrittwieser et al., 2020), a powerful model-based agent, and evaluate its performance on both procedural and task generalization. We identify three factors of procedural generalization -- planning, self-supervised representation learning, and procedural data diversity -- and show that by combining these techniques, we achieve state-of-the art generalization performance and data efficiency on Procgen (Cobbe et al., 2019). However, we find that these factors do not always provide the same benefits for the task generalization benchmarks in Meta-World (Yu et al., 2019), indicating that transfer remains a challenge and may require different approaches than procedural generalization. Overall, we suggest that building generalizable agents requires moving beyond the single-task, model-free paradigm and towards self-supervised model-based agents that are trained in rich, procedural, multi-task environments.
On the role of planning in model-based deep reinforcement learning
Nov 08, 2020
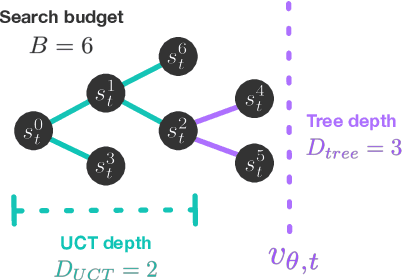
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.
Exploring Exploration: Comparing Children with RL Agents in Unified Environments
May 06, 2020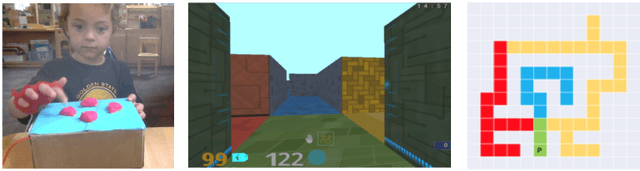
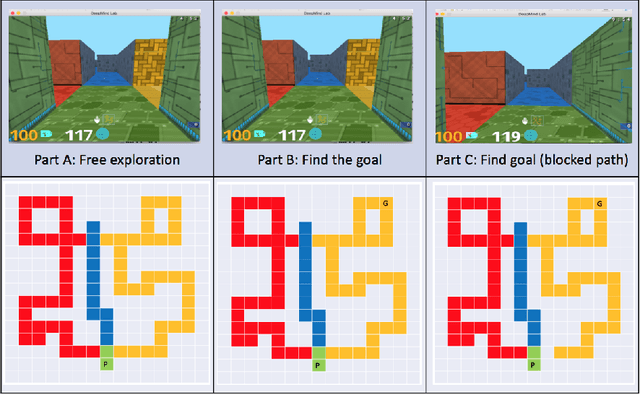
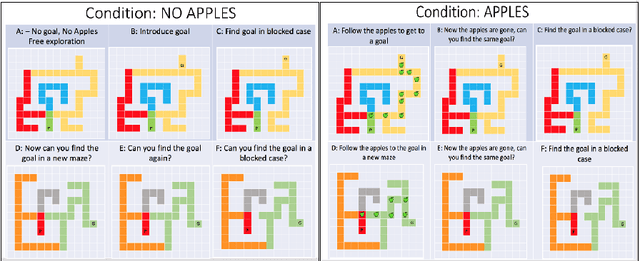
Research in developmental psychology consistently shows that children explore the world thoroughly and efficiently and that this exploration allows them to learn. In turn, this early learning supports more robust generalization and intelligent behavior later in life. While much work has gone into developing methods for exploration in machine learning, artificial agents have not yet reached the high standard set by their human counterparts. In this work we propose using DeepMind Lab (Beattie et al., 2016) as a platform to directly compare child and agent behaviors and to develop new exploration techniques. We outline two ongoing experiments to demonstrate the effectiveness of a direct comparison, and outline a number of open research questions that we believe can be tested using this methodology.
Divide-and-Conquer Monte Carlo Tree Search For Goal-Directed Planning
Apr 23, 2020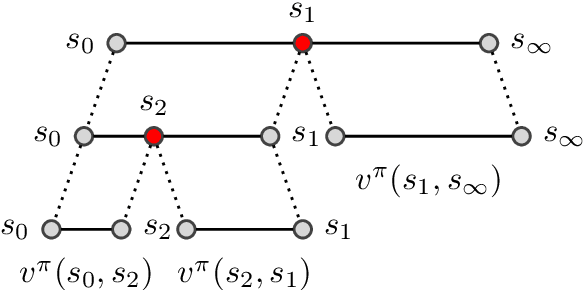
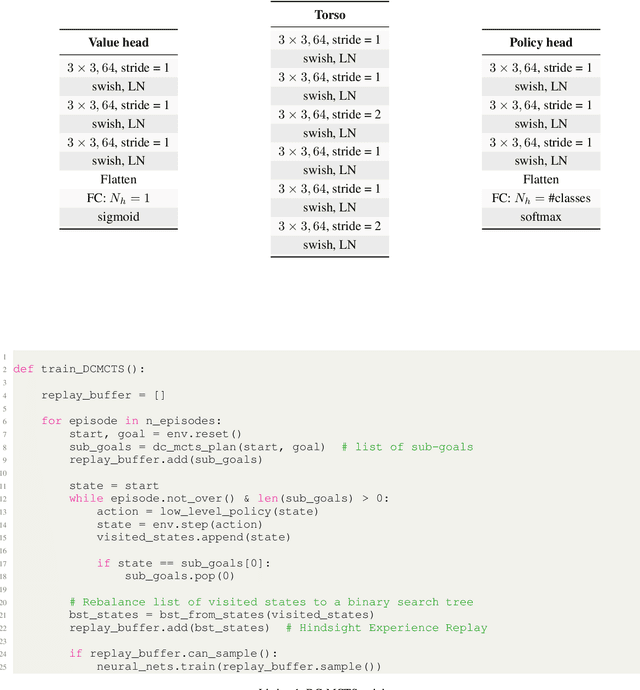
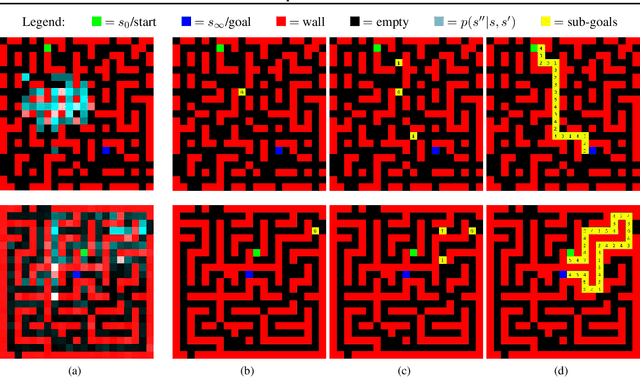
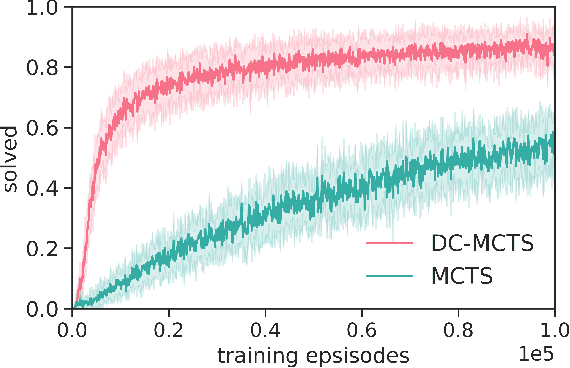
Standard planners for sequential decision making (including Monte Carlo planning, tree search, dynamic programming, etc.) are constrained by an implicit sequential planning assumption: The order in which a plan is constructed is the same in which it is executed. We consider alternatives to this assumption for the class of goal-directed Reinforcement Learning (RL) problems. Instead of an environment transition model, we assume an imperfect, goal-directed policy. This low-level policy can be improved by a plan, consisting of an appropriate sequence of sub-goals that guide it from the start to the goal state. We propose a planning algorithm, Divide-and-Conquer Monte Carlo Tree Search (DC-MCTS), for approximating the optimal plan by means of proposing intermediate sub-goals which hierarchically partition the initial tasks into simpler ones that are then solved independently and recursively. The algorithm critically makes use of a learned sub-goal proposal for finding appropriate partitions trees of new tasks based on prior experience. Different strategies for learning sub-goal proposals give rise to different planning strategies that strictly generalize sequential planning. We show that this algorithmic flexibility over planning order leads to improved results in navigation tasks in grid-worlds as well as in challenging continuous control environments.
Combining Q-Learning and Search with Amortized Value Estimates
Jan 10, 2020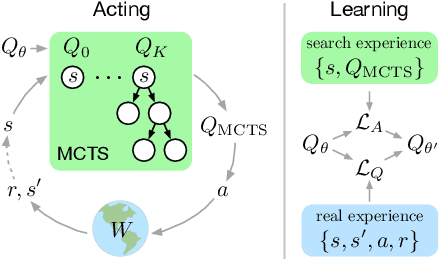
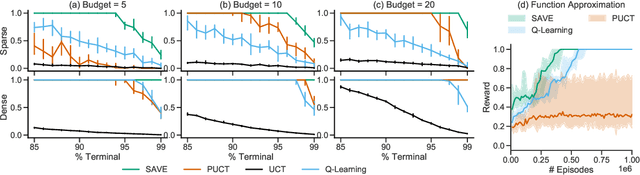
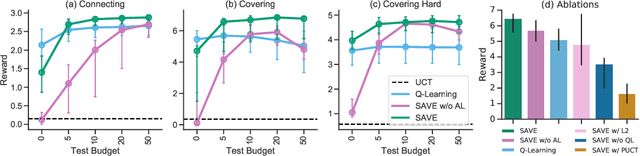
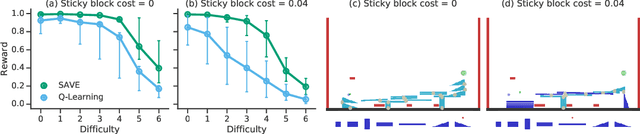
We introduce "Search with Amortized Value Estimates" (SAVE), an approach for combining model-free Q-learning with model-based Monte-Carlo Tree Search (MCTS). In SAVE, a learned prior over state-action values is used to guide MCTS, which estimates an improved set of state-action values. The new Q-estimates are then used in combination with real experience to update the prior. This effectively amortizes the value computation performed by MCTS, resulting in a cooperative relationship between model-free learning and model-based search. SAVE can be implemented on top of any Q-learning agent with access to a model, which we demonstrate by incorporating it into agents that perform challenging physical reasoning tasks and Atari. SAVE consistently achieves higher rewards with fewer training steps, and---in contrast to typical model-based search approaches---yields strong performance with very small search budgets. By combining real experience with information computed during search, SAVE demonstrates that it is possible to improve on both the performance of model-free learning and the computational cost of planning.
Object-oriented state editing for HRL
Oct 31, 2019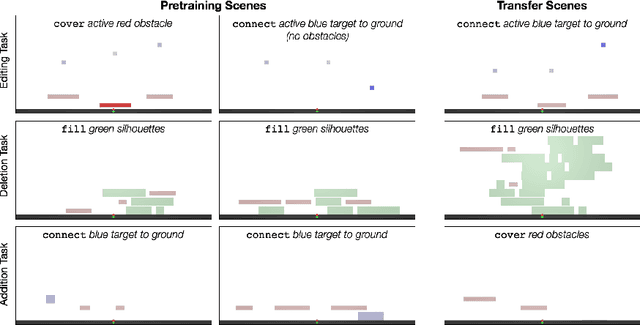
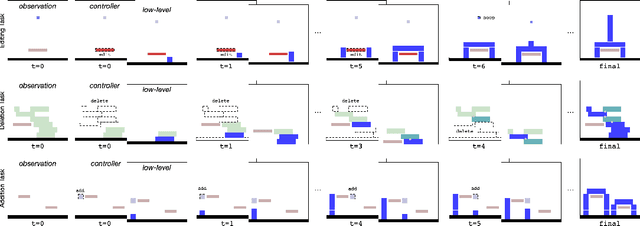
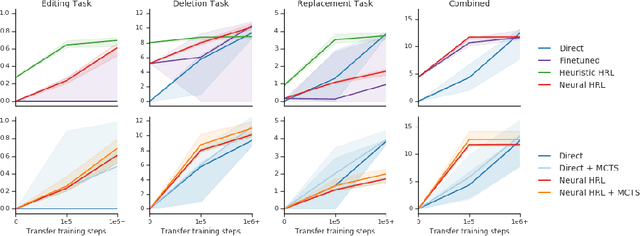

We introduce agents that use object-oriented reasoning to consider alternate states of the world in order to more quickly find solutions to problems. Specifically, a hierarchical controller directs a low-level agent to behave as if objects in the scene were added, deleted, or modified. The actions taken by the controller are defined over a graph-based representation of the scene, with actions corresponding to adding, deleting, or editing the nodes of a graph. We present preliminary results on three environments, demonstrating that our approach can achieve similar levels of reward as non-hierarchical agents, but with better data efficiency.
Structured agents for physical construction
May 13, 2019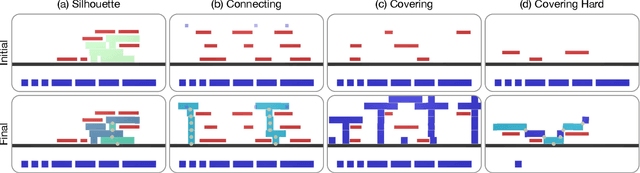
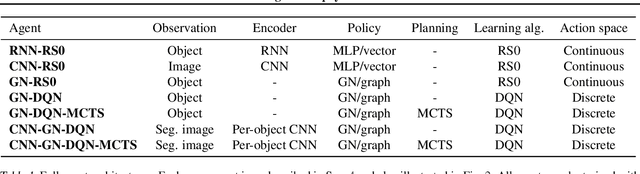
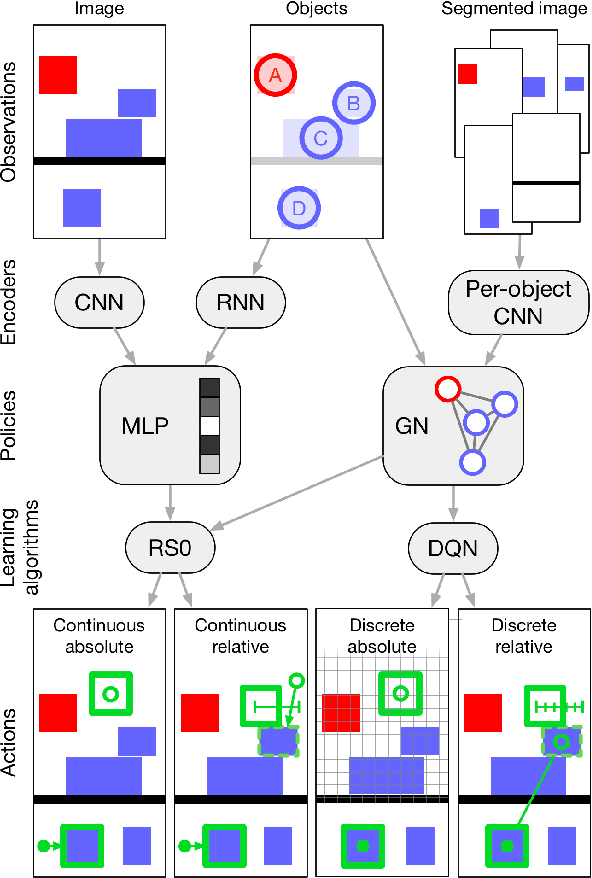
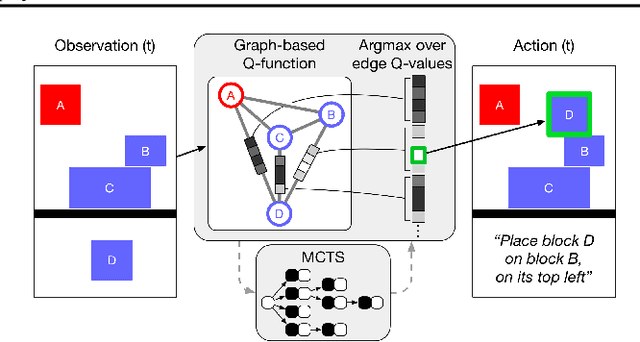
Physical construction---the ability to compose objects, subject to physical dynamics, to serve some function---is fundamental to human intelligence. We introduce a suite of challenging physical construction tasks inspired by how children play with blocks, such as matching a target configuration, stacking blocks to connect objects together, and creating shelter-like structures over target objects. We examine how a range of deep reinforcement learning agents fare on these challenges, and introduce several new approaches which provide superior performance. Our results show that agents which use structured representations (e.g., objects and scene graphs) and structured policies (e.g., object-centric actions) outperform those which use less structured representations, and generalize better beyond their training when asked to reason about larger scenes. Model-based agents which use Monte-Carlo Tree Search also outperform strictly model-free agents in our most challenging construction problems. We conclude that approaches which combine structured representations and reasoning with powerful learning are a key path toward agents that possess rich intuitive physics, scene understanding, and planning.