 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Understanding How Machines Can Learn Causal Overhypotheses
Jun 16, 2022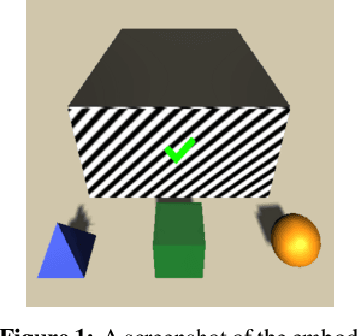

Recent work in machine learning and cognitive science has suggested that understanding causal information is essential to the development of intelligence. The extensive literature in cognitive science using the ``blicket detector'' environment shows that children are adept at many kinds of causal inference and learning. We propose to adapt that environment for machine learning agents. One of the key challenges for current machine learning algorithms is modeling and understanding causal overhypotheses: transferable abstract hypotheses about sets of causal relationships. In contrast, even young children spontaneously learn and use causal overhypotheses. In this work, we present a new benchmark -- a flexible environment which allows for the evaluation of existing techniques under variable causal overhypotheses -- and demonstrate that many existing state-of-the-art methods have trouble generalizing in this environment. The code and resources for this benchmark are available at https://github.com/CannyLab/casual_overhypotheses.
Learning Causal Overhypotheses through Exploration in Children and Computational Models
Feb 21, 2022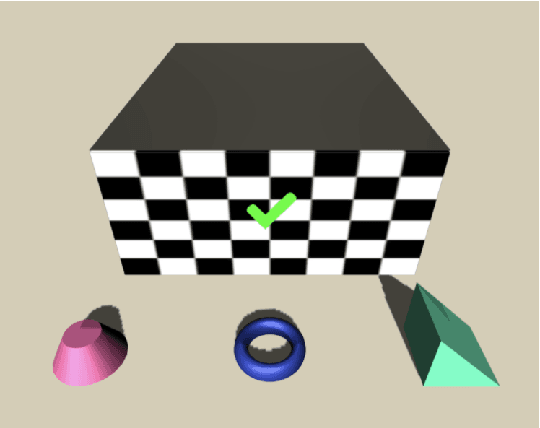

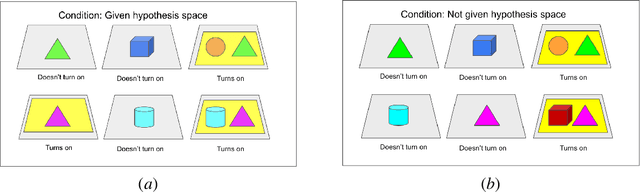
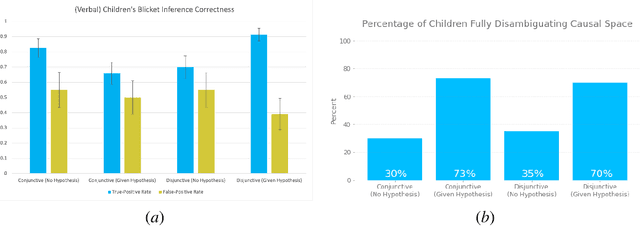
Despite recent progress in reinforcement learning (RL), RL algorithms for exploration still remain an active area of research. Existing methods often focus on state-based metrics, which do not consider the underlying causal structures of the environment, and while recent research has begun to explore RL environments for causal learning, these environments primarily leverage causal information through causal inference or induction rather than exploration. In contrast, human children - some of the most proficient explorers - have been shown to use causal information to great benefit. In this work, we introduce a novel RL environment designed with a controllable causal structure, which allows us to evaluate exploration strategies used by both agents and children in a unified environment. In addition, through experimentation on both computation models and children, we demonstrate that there are significant differences between information-gain optimal RL exploration in causal environments and the exploration of children in the same environments. We conclude with a discussion of how these findings may inspire new directions of research into efficient exploration and disambiguation of causal structures for RL algorithms.