 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Successor Representations with Kalman Temporal Differences
Oct 06, 2019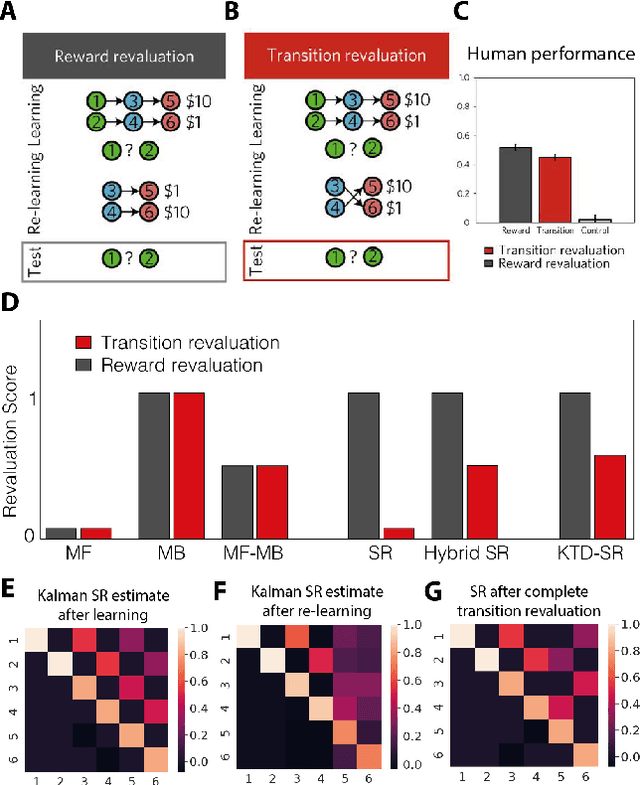
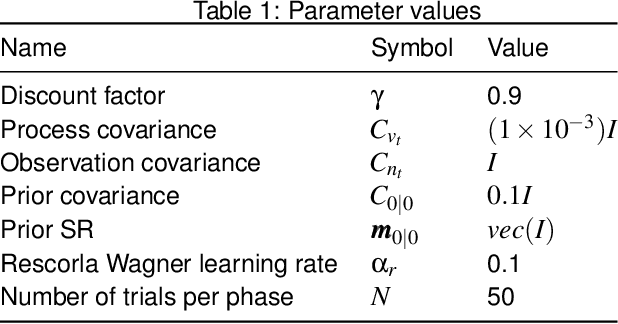
The effectiveness of Reinforcement Learning (RL) depends on an animal's ability to assign credit for rewards to the appropriate preceding stimuli. One aspect of understanding the neural underpinnings of this process involves understanding what sorts of stimulus representations support generalisation. The Successor Representation (SR), which enforces generalisation over states that predict similar outcomes, has become an increasingly popular model in this space of inquiries. Another dimension of credit assignment involves understanding how animals handle uncertainty about learned associations, using probabilistic methods such as Kalman Temporal Differences (KTD). Combining these approaches, we propose using KTD to estimate a distribution over the SR. KTD-SR captures uncertainty about the estimated SR as well as covariances between different long-term predictions. We show that because of this, KTD-SR exhibits partial transition revaluation as humans do in this experiment without additional replay, unlike the standard TD-SR algorithm. We conclude by discussing future applications of the KTD-SR as a model of the interaction between predictive and probabilistic animal reasoning.
Structured agents for physical construction
May 13, 2019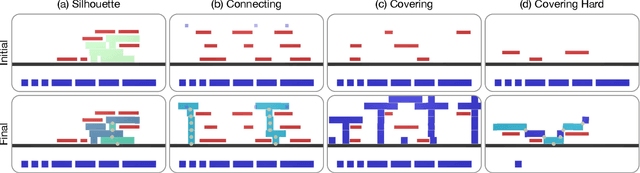
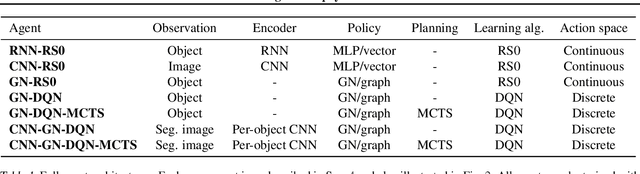
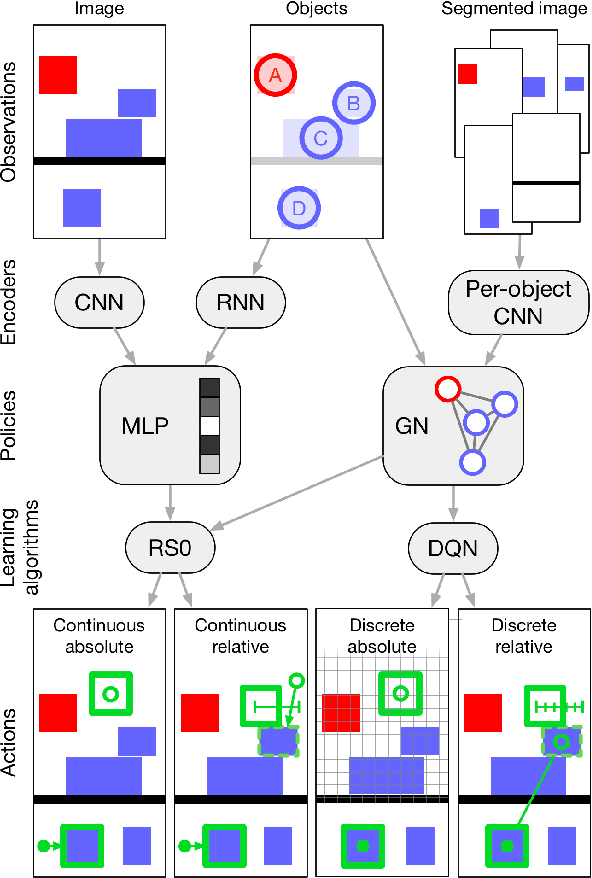
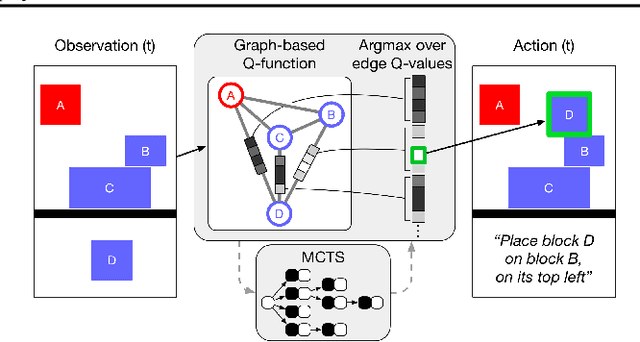
Physical construction---the ability to compose objects, subject to physical dynamics, to serve some function---is fundamental to human intelligence. We introduce a suite of challenging physical construction tasks inspired by how children play with blocks, such as matching a target configuration, stacking blocks to connect objects together, and creating shelter-like structures over target objects. We examine how a range of deep reinforcement learning agents fare on these challenges, and introduce several new approaches which provide superior performance. Our results show that agents which use structured representations (e.g., objects and scene graphs) and structured policies (e.g., object-centric actions) outperform those which use less structured representations, and generalize better beyond their training when asked to reason about larger scenes. Model-based agents which use Monte-Carlo Tree Search also outperform strictly model-free agents in our most challenging construction problems. We conclude that approaches which combine structured representations and reasoning with powerful learning are a key path toward agents that possess rich intuitive physics, scene understanding, and planning.