 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect Motion Models for Assessing Generated Videos
Apr 30, 2025A current limitation of video generative video models is that they generate plausible looking frames, but poor motion -- an issue that is not well captured by FVD and other popular methods for evaluating generated videos. Here we go beyond FVD by developing a metric which better measures plausible object interactions and motion. Our novel approach is based on auto-encoding point tracks and yields motion features that can be used to not only compare distributions of videos (as few as one generated and one ground truth, or as many as two datasets), but also for evaluating motion of single videos. We show that using point tracks instead of pixel reconstruction or action recognition features results in a metric which is markedly more sensitive to temporal distortions in synthetic data, and can predict human evaluations of temporal consistency and realism in generated videos obtained from open-source models better than a wide range of alternatives. We also show that by using a point track representation, we can spatiotemporally localize generative video inconsistencies, providing extra interpretability of generated video errors relative to prior work. An overview of the results and link to the code can be found on the project page: http://trajan-paper.github.io.
TAPNext: Tracking Any Point (TAP) as Next Token Prediction
Apr 08, 2025Tracking Any Point (TAP) in a video is a challenging computer vision problem with many demonstrated applications in robotics, video editing, and 3D reconstruction. Existing methods for TAP rely heavily on complex tracking-specific inductive biases and heuristics, limiting their generality and potential for scaling. To address these challenges, we present TAPNext, a new approach that casts TAP as sequential masked token decoding. Our model is causal, tracks in a purely online fashion, and removes tracking-specific inductive biases. This enables TAPNext to run with minimal latency, and removes the temporal windowing required by many existing state of art trackers. Despite its simplicity, TAPNext achieves a new state-of-the-art tracking performance among both online and offline trackers. Finally, we present evidence that many widely used tracking heuristics emerge naturally in TAPNext through end-to-end training.
Scaling 4D Representations
Dec 19, 2024



Scaling has not yet been convincingly demonstrated for pure self-supervised learning from video. However, prior work has focused evaluations on semantic-related tasks $\unicode{x2013}$ action classification, ImageNet classification, etc. In this paper we focus on evaluating self-supervised learning on non-semantic vision tasks that are more spatial (3D) and temporal (+1D = 4D), such as camera pose estimation, point and object tracking, and depth estimation. We show that by learning from very large video datasets, masked auto-encoding (MAE) with transformer video models actually scales, consistently improving performance on these 4D tasks, as model size increases from 20M all the way to the largest by far reported self-supervised video model $\unicode{x2013}$ 22B parameters. Rigorous apples-to-apples comparison with many recent image and video models demonstrates the benefits of scaling 4D representations.
Motion Prompting: Controlling Video Generation with Motion Trajectories
Dec 03, 2024Motion control is crucial for generating expressive and compelling video content; however, most existing video generation models rely mainly on text prompts for control, which struggle to capture the nuances of dynamic actions and temporal compositions. To this end, we train a video generation model conditioned on spatio-temporally sparse or dense motion trajectories. In contrast to prior motion conditioning work, this flexible representation can encode any number of trajectories, object-specific or global scene motion, and temporally sparse motion; due to its flexibility we refer to this conditioning as motion prompts. While users may directly specify sparse trajectories, we also show how to translate high-level user requests into detailed, semi-dense motion prompts, a process we term motion prompt expansion. We demonstrate the versatility of our approach through various applications, including camera and object motion control, "interacting" with an image, motion transfer, and image editing. Our results showcase emergent behaviors, such as realistic physics, suggesting the potential of motion prompts for probing video models and interacting with future generative world models. Finally, we evaluate quantitatively, conduct a human study, and demonstrate strong performance. Video results are available on our webpage: https://motion-prompting.github.io/
Moving Off-the-Grid: Scene-Grounded Video Representations
Nov 08, 2024



Current vision models typically maintain a fixed correspondence between their representation structure and image space. Each layer comprises a set of tokens arranged "on-the-grid," which biases patches or tokens to encode information at a specific spatio(-temporal) location. In this work we present Moving Off-the-Grid (MooG), a self-supervised video representation model that offers an alternative approach, allowing tokens to move "off-the-grid" to better enable them to represent scene elements consistently, even as they move across the image plane through time. By using a combination of cross-attention and positional embeddings we disentangle the representation structure and image structure. We find that a simple self-supervised objective--next frame prediction--trained on video data, results in a set of latent tokens which bind to specific scene structures and track them as they move. We demonstrate the usefulness of MooG's learned representation both qualitatively and quantitatively by training readouts on top of the learned representation on a variety of downstream tasks. We show that MooG can provide a strong foundation for different vision tasks when compared to "on-the-grid" baselines.
Gen2Act: Human Video Generation in Novel Scenarios enables Generalizable Robot Manipulation
Sep 24, 2024



How can robot manipulation policies generalize to novel tasks involving unseen object types and new motions? In this paper, we provide a solution in terms of predicting motion information from web data through human video generation and conditioning a robot policy on the generated video. Instead of attempting to scale robot data collection which is expensive, we show how we can leverage video generation models trained on easily available web data, for enabling generalization. Our approach Gen2Act casts language-conditioned manipulation as zero-shot human video generation followed by execution with a single policy conditioned on the generated video. To train the policy, we use an order of magnitude less robot interaction data compared to what the video prediction model was trained on. Gen2Act doesn't require fine-tuning the video model at all and we directly use a pre-trained model for generating human videos. Our results on diverse real-world scenarios show how Gen2Act enables manipulating unseen object types and performing novel motions for tasks not present in the robot data. Videos are at https://homangab.github.io/gen2act/
TAPVid-3D: A Benchmark for Tracking Any Point in 3D
Jul 08, 2024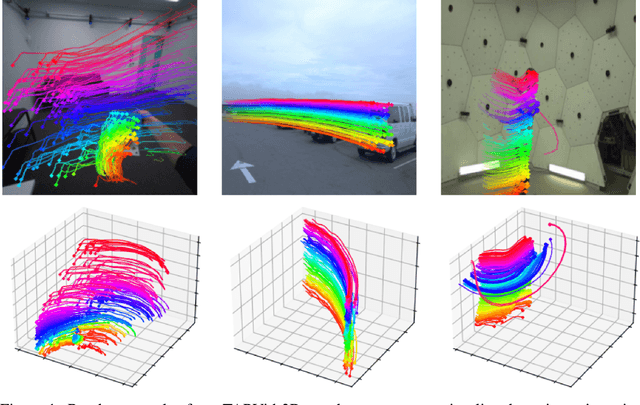
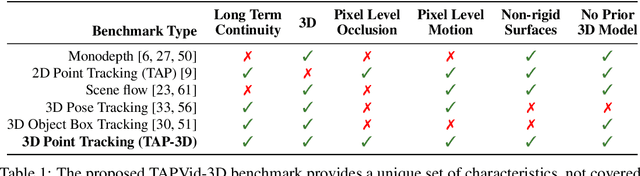
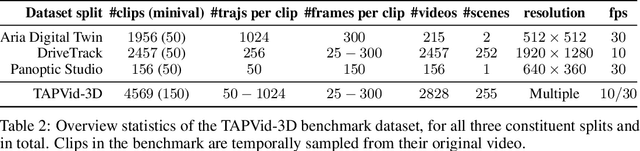
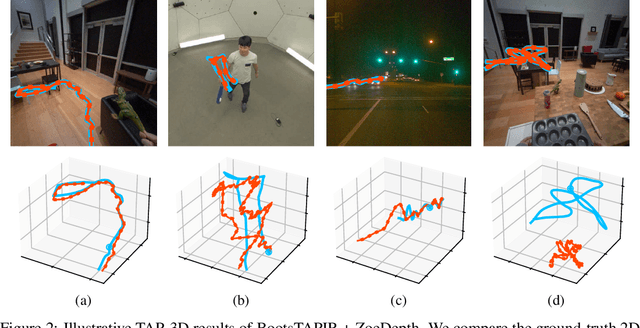
We introduce a new benchmark, TAPVid-3D, for evaluating the task of long-range Tracking Any Point in 3D (TAP-3D). While point tracking in two dimensions (TAP) has many benchmarks measuring performance on real-world videos, such as TAPVid-DAVIS, three-dimensional point tracking has none. To this end, leveraging existing footage, we build a new benchmark for 3D point tracking featuring 4,000+ real-world videos, composed of three different data sources spanning a variety of object types, motion patterns, and indoor and outdoor environments. To measure performance on the TAP-3D task, we formulate a collection of metrics that extend the Jaccard-based metric used in TAP to handle the complexities of ambiguous depth scales across models, occlusions, and multi-track spatio-temporal smoothness. We manually verify a large sample of trajectories to ensure correct video annotations, and assess the current state of the TAP-3D task by constructing competitive baselines using existing tracking models. We anticipate this benchmark will serve as a guidepost to improve our ability to understand precise 3D motion and surface deformation from monocular video. Code for dataset download, generation, and model evaluation is available at https://tapvid3d.github.io
BootsTAP: Bootstrapped Training for Tracking-Any-Point
Feb 01, 2024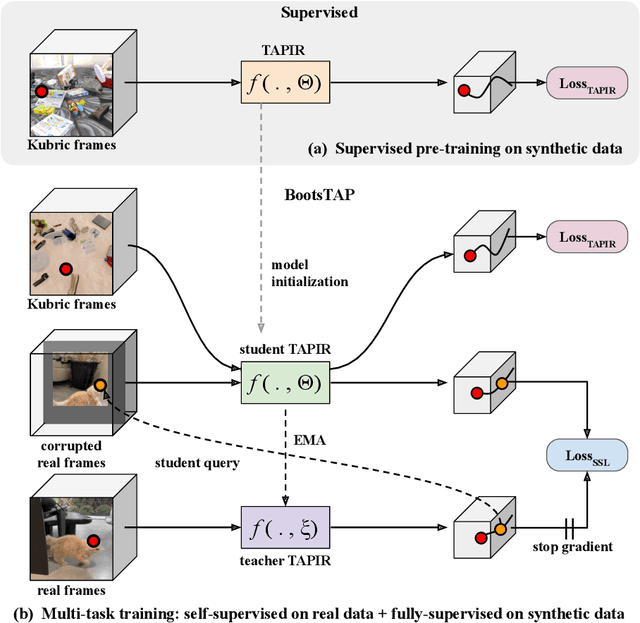
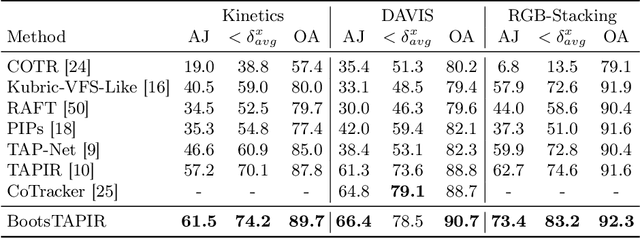
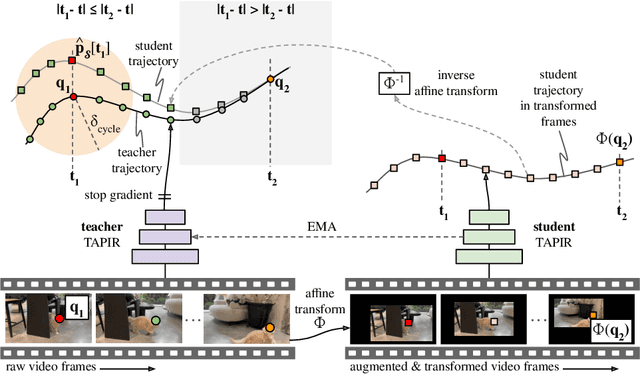
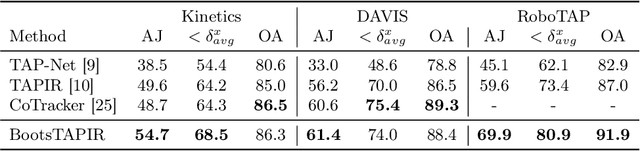
To endow models with greater understanding of physics and motion, it is useful to enable them to perceive how solid surfaces move and deform in real scenes. This can be formalized as Tracking-Any-Point (TAP), which requires the algorithm to be able to track any point corresponding to a solid surface in a video, potentially densely in space and time. Large-scale ground-truth training data for TAP is only available in simulation, which currently has limited variety of objects and motion. In this work, we demonstrate how large-scale, unlabeled, uncurated real-world data can improve a TAP model with minimal architectural changes, using a self-supervised student-teacher setup. We demonstrate state-of-the-art performance on the TAP-Vid benchmark surpassing previous results by a wide margin: for example, TAP-Vid-DAVIS performance improves from 61.3% to 66.4%, and TAP-Vid-Kinetics from 57.2% to 61.5%.
Learning from One Continuous Video Stream
Dec 01, 2023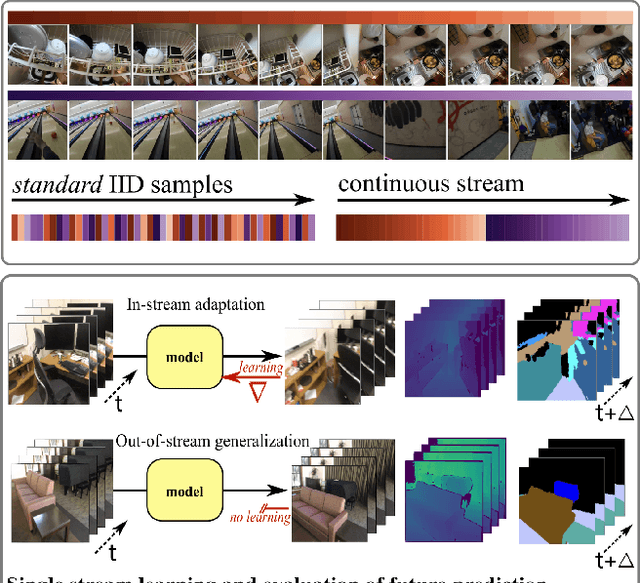

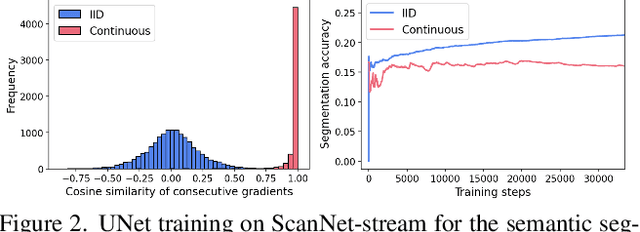

We introduce a framework for online learning from a single continuous video stream -- the way people and animals learn, without mini-batches, data augmentation or shuffling. This poses great challenges given the high correlation between consecutive video frames and there is very little prior work on it. Our framework allows us to do a first deep dive into the topic and includes a collection of streams and tasks composed from two existing video datasets, plus methodology for performance evaluation that considers both adaptation and generalization. We employ pixel-to-pixel modelling as a practical and flexible way to switch between pre-training and single-stream evaluation as well as between arbitrary tasks, without ever requiring changes to models and always using the same pixel loss. Equipped with this framework we obtained large single-stream learning gains from pre-training with a novel family of future prediction tasks, found that momentum hurts, and that the pace of weight updates matters. The combination of these insights leads to matching the performance of IID learning with batch size 1, when using the same architecture and without costly replay buffers.
RoboTAP: Tracking Arbitrary Points for Few-Shot Visual Imitation
Aug 31, 2023



For robots to be useful outside labs and specialized factories we need a way to teach them new useful behaviors quickly. Current approaches lack either the generality to onboard new tasks without task-specific engineering, or else lack the data-efficiency to do so in an amount of time that enables practical use. In this work we explore dense tracking as a representational vehicle to allow faster and more general learning from demonstration. Our approach utilizes Track-Any-Point (TAP) models to isolate the relevant motion in a demonstration, and parameterize a low-level controller to reproduce this motion across changes in the scene configuration. We show this results in robust robot policies that can solve complex object-arrangement tasks such as shape-matching, stacking, and even full path-following tasks such as applying glue and sticking objects together, all from demonstrations that can be collected in minutes.