 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mixed Diet Makes DINO An Omnivorous Vision Encoder
Feb 27, 2026Pre-trained vision encoders like DINOv2 have demonstrated exceptional performance on unimodal tasks. However, we observe that their feature representations are poorly aligned across different modalities. For instance, the feature embedding for an RGB image and its corresponding depth map of the same scene exhibit a cosine similarity that is nearly identical to that of two random, unrelated images. To address this, we propose the Omnivorous Vision Encoder, a novel framework that learns a modality-agnostic feature space. We train the encoder with a dual objective: first, to maximize the feature alignment between different modalities of the same scene; and second, a distillation objective that anchors the learned representations to the output of a fully frozen teacher such as DINOv2. The resulting student encoder becomes "omnivorous" by producing a consistent, powerful embedding for a given scene, regardless of the input modality (RGB, Depth, Segmentation, etc.). This approach enables robust cross-modal understanding while retaining the discriminative semantics of the original foundation model.
Efficiently Reconstructing Dynamic Scenes One D4RT at a Time
Dec 10, 2025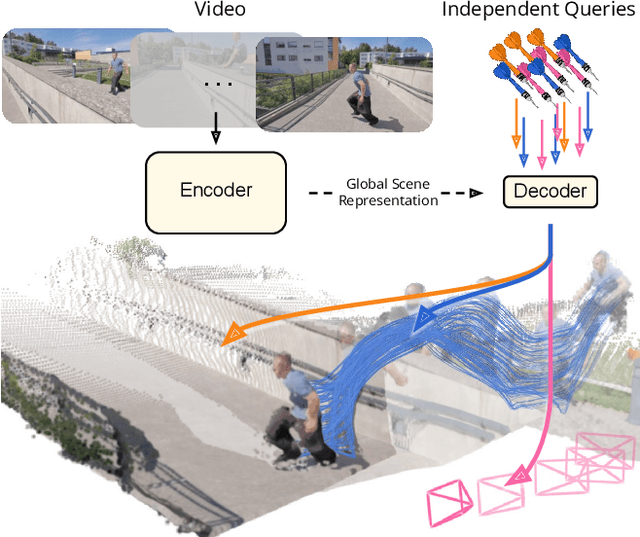
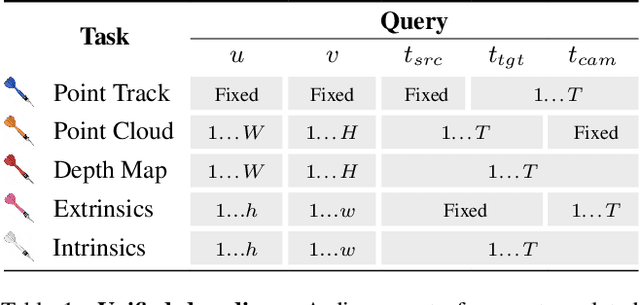
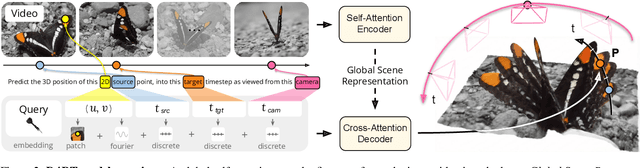
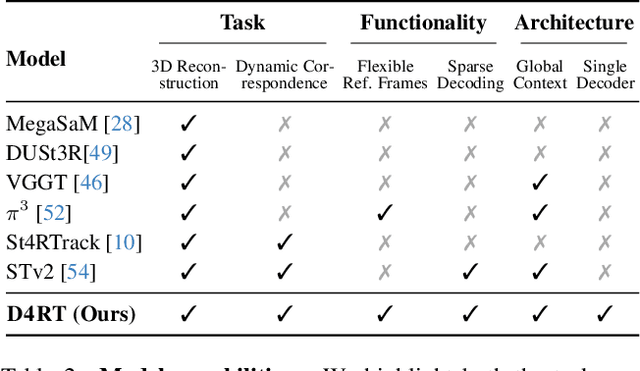
Understanding and reconstructing the complex geometry and motion of dynamic scenes from video remains a formidable challenge in computer vision. This paper introduces D4RT, a simple yet powerful feedforward model designed to efficiently solve this task. D4RT utilizes a unified transformer architecture to jointly infer depth, spatio-temporal correspondence, and full camera parameters from a single video. Its core innovation is a novel querying mechanism that sidesteps the heavy computation of dense, per-frame decoding and the complexity of managing multiple, task-specific decoders. Our decoding interface allows the model to independently and flexibly probe the 3D position of any point in space and time. The result is a lightweight and highly scalable method that enables remarkably efficient training and inference. We demonstrate that our approach sets a new state of the art, outperforming previous methods across a wide spectrum of 4D reconstruction tasks. We refer to the project webpage for animated results: https://d4rt-paper.github.io/.
TAPNext: Tracking Any Point (TAP) as Next Token Prediction
Apr 08, 2025Tracking Any Point (TAP) in a video is a challenging computer vision problem with many demonstrated applications in robotics, video editing, and 3D reconstruction. Existing methods for TAP rely heavily on complex tracking-specific inductive biases and heuristics, limiting their generality and potential for scaling. To address these challenges, we present TAPNext, a new approach that casts TAP as sequential masked token decoding. Our model is causal, tracks in a purely online fashion, and removes tracking-specific inductive biases. This enables TAPNext to run with minimal latency, and removes the temporal windowing required by many existing state of art trackers. Despite its simplicity, TAPNext achieves a new state-of-the-art tracking performance among both online and offline trackers. Finally, we present evidence that many widely used tracking heuristics emerge naturally in TAPNext through end-to-end training.
Scaling 4D Representations
Dec 19, 2024



Scaling has not yet been convincingly demonstrated for pure self-supervised learning from video. However, prior work has focused evaluations on semantic-related tasks $\unicode{x2013}$ action classification, ImageNet classification, etc. In this paper we focus on evaluating self-supervised learning on non-semantic vision tasks that are more spatial (3D) and temporal (+1D = 4D), such as camera pose estimation, point and object tracking, and depth estimation. We show that by learning from very large video datasets, masked auto-encoding (MAE) with transformer video models actually scales, consistently improving performance on these 4D tasks, as model size increases from 20M all the way to the largest by far reported self-supervised video model $\unicode{x2013}$ 22B parameters. Rigorous apples-to-apples comparison with many recent image and video models demonstrates the benefits of scaling 4D representations.
PaliGemma: A versatile 3B VLM for transfer
Jul 10, 2024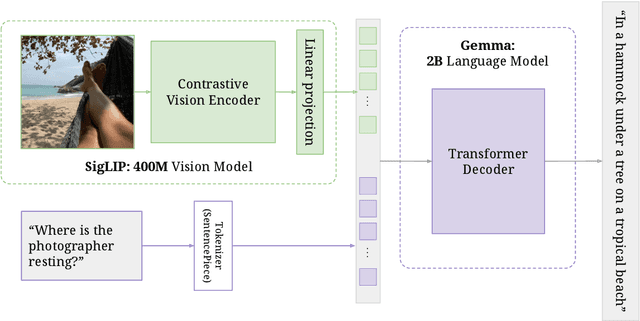
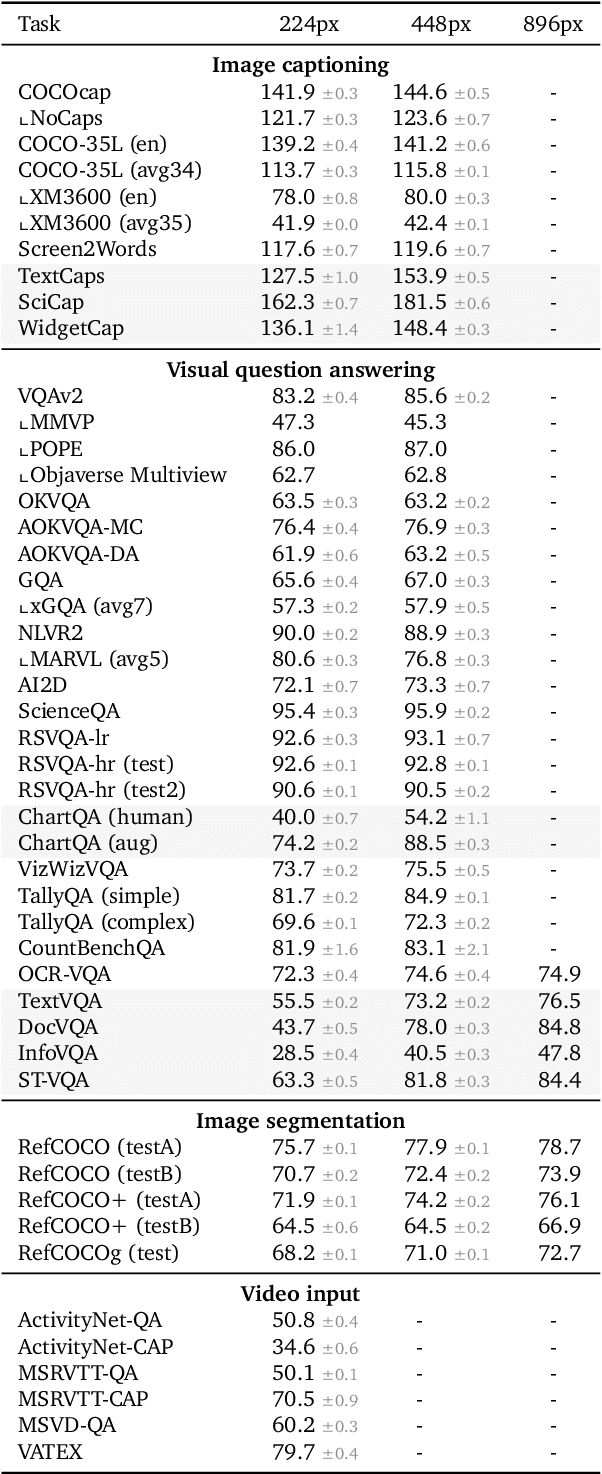
PaliGemma is an open Vision-Language Model (VLM) that is based on the SigLIP-So400m vision encoder and the Gemma-2B language model. It is trained to be a versatile and broadly knowledgeable base model that is effective to transfer. It achieves strong performance on a wide variety of open-world tasks. We evaluate PaliGemma on almost 40 diverse tasks including standard VLM benchmarks, but also more specialized tasks such as remote-sensing and segmentation.
TAPVid-3D: A Benchmark for Tracking Any Point in 3D
Jul 08, 2024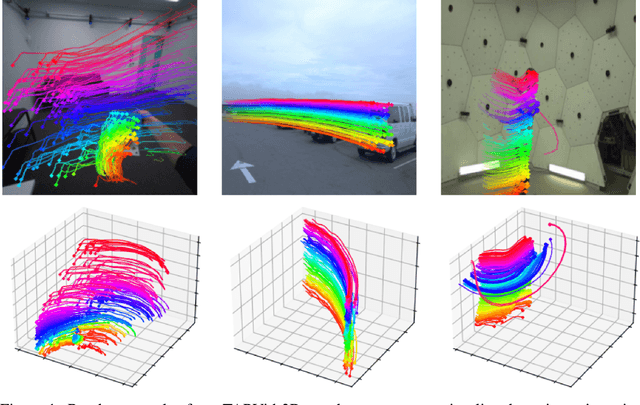
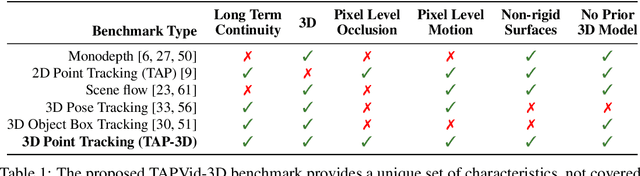
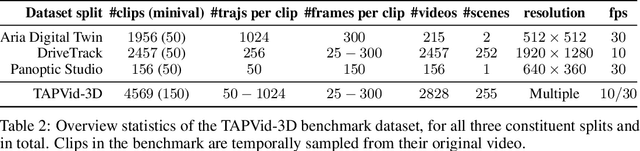
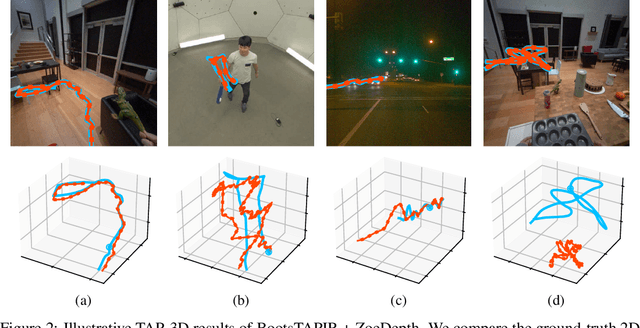
We introduce a new benchmark, TAPVid-3D, for evaluating the task of long-range Tracking Any Point in 3D (TAP-3D). While point tracking in two dimensions (TAP) has many benchmarks measuring performance on real-world videos, such as TAPVid-DAVIS, three-dimensional point tracking has none. To this end, leveraging existing footage, we build a new benchmark for 3D point tracking featuring 4,000+ real-world videos, composed of three different data sources spanning a variety of object types, motion patterns, and indoor and outdoor environments. To measure performance on the TAP-3D task, we formulate a collection of metrics that extend the Jaccard-based metric used in TAP to handle the complexities of ambiguous depth scales across models, occlusions, and multi-track spatio-temporal smoothness. We manually verify a large sample of trajectories to ensure correct video annotations, and assess the current state of the TAP-3D task by constructing competitive baselines using existing tracking models. We anticipate this benchmark will serve as a guidepost to improve our ability to understand precise 3D motion and surface deformation from monocular video. Code for dataset download, generation, and model evaluation is available at https://tapvid3d.github.io
Memory Consolidation Enables Long-Context Video Understanding
Feb 08, 2024



Most transformer-based video encoders are limited to short temporal contexts due to their quadratic complexity. While various attempts have been made to extend this context, this has often come at the cost of both conceptual and computational complexity. We propose to instead re-purpose existing pre-trained video transformers by simply fine-tuning them to attend to memories derived non-parametrically from past activations. By leveraging redundancy reduction, our memory-consolidated vision transformer (MC-ViT) effortlessly extends its context far into the past and exhibits excellent scaling behavior when learning from longer videos. In doing so, MC-ViT sets a new state-of-the-art in long-context video understanding on EgoSchema, Perception Test, and Diving48, outperforming methods that benefit from orders of magnitude more parameters.
BootsTAP: Bootstrapped Training for Tracking-Any-Point
Feb 01, 2024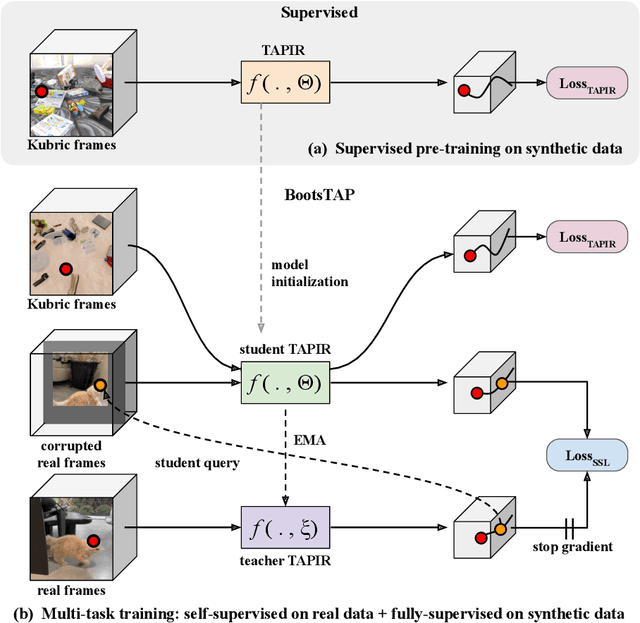
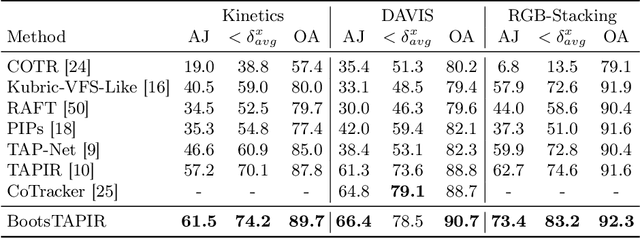
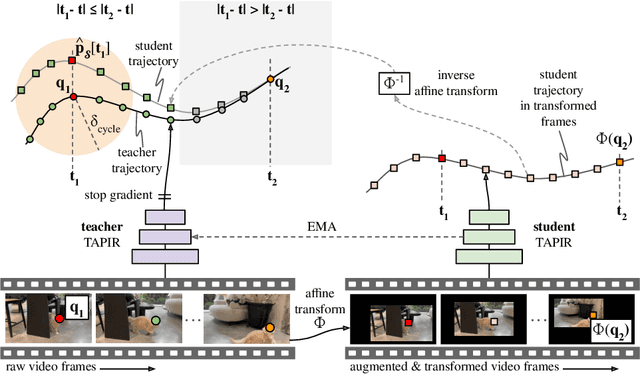
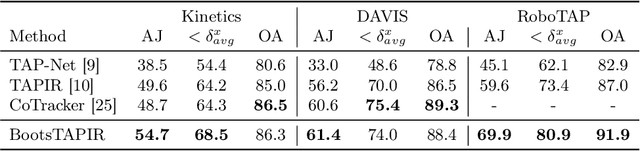
To endow models with greater understanding of physics and motion, it is useful to enable them to perceive how solid surfaces move and deform in real scenes. This can be formalized as Tracking-Any-Point (TAP), which requires the algorithm to be able to track any point corresponding to a solid surface in a video, potentially densely in space and time. Large-scale ground-truth training data for TAP is only available in simulation, which currently has limited variety of objects and motion. In this work, we demonstrate how large-scale, unlabeled, uncurated real-world data can improve a TAP model with minimal architectural changes, using a self-supervised student-teacher setup. We demonstrate state-of-the-art performance on the TAP-Vid benchmark surpassing previous results by a wide margin: for example, TAP-Vid-DAVIS performance improves from 61.3% to 66.4%, and TAP-Vid-Kinetics from 57.2% to 61.5%.
A Simple Recipe for Contrastively Pre-training Video-First Encoders Beyond 16 Frames
Dec 12, 2023



Understanding long, real-world videos requires modeling of long-range visual dependencies. To this end, we explore video-first architectures, building on the common paradigm of transferring large-scale, image--text models to video via shallow temporal fusion. However, we expose two limitations to the approach: (1) decreased spatial capabilities, likely due to poor video--language alignment in standard video datasets, and (2) higher memory consumption, bottlenecking the number of frames that can be processed. To mitigate the memory bottleneck, we systematically analyze the memory/accuracy trade-off of various efficient methods: factorized attention, parameter-efficient image-to-video adaptation, input masking, and multi-resolution patchification. Surprisingly, simply masking large portions of the video (up to 75%) during contrastive pre-training proves to be one of the most robust ways to scale encoders to videos up to 4.3 minutes at 1 FPS. Our simple approach for training long video-to-text models, which scales to 1B parameters, does not add new architectural complexity and is able to outperform the popular paradigm of using much larger LLMs as an information aggregator over segment-based information on benchmarks with long-range temporal dependencies (YouCook2, EgoSchema).
Perception Test: A Diagnostic Benchmark for Multimodal Video Models
May 23, 2023


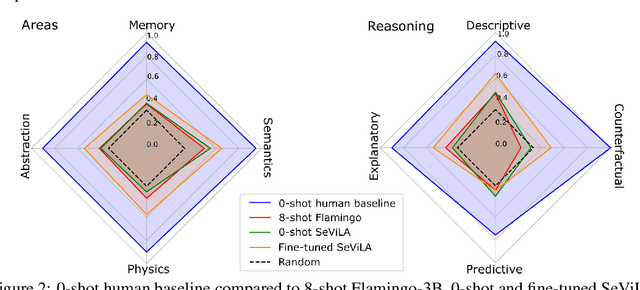
We propose a novel multimodal video benchmark - the Perception Test - to evaluate the perception and reasoning skills of pre-trained multimodal models (e.g. Flamingo, BEiT-3, or GPT-4). Compared to existing benchmarks that focus on computational tasks (e.g. classification, detection or tracking), the Perception Test focuses on skills (Memory, Abstraction, Physics, Semantics) and types of reasoning (descriptive, explanatory, predictive, counterfactual) across video, audio, and text modalities, to provide a comprehensive and efficient evaluation tool. The benchmark probes pre-trained models for their transfer capabilities, in a zero-shot / few-shot or limited finetuning regime. For these purposes, the Perception Test introduces 11.6k real-world videos, 23s average length, designed to show perceptually interesting situations, filmed by around 100 participants worldwide. The videos are densely annotated with six types of labels (multiple-choice and grounded video question-answers, object and point tracks, temporal action and sound segments), enabling both language and non-language evaluations. The fine-tuning and validation splits of the benchmark are publicly available (CC-BY license), in addition to a challenge server with a held-out test split. Human baseline results compared to state-of-the-art video QA models show a significant gap in performance (91.4% vs 43.6%), suggesting that there is significant room for improvement in multimodal video understanding. Dataset, baselines code, and challenge server are available at https://github.com/deepmind/perception_test