 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Sep 10, 2024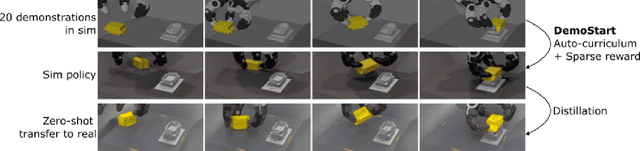
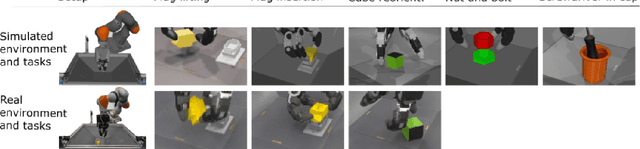
We present DemoStart, a novel auto-curriculum reinforcement learning method capable of learning complex manipulation behaviors on an arm equipped with a three-fingered robotic hand, from only a sparse reward and a handful of demonstrations in simulation. Learning from simulation drastically reduces the development cycle of behavior generation, and domain randomization techniques are leveraged to achieve successful zero-shot sim-to-real transfer. Transferred policies are learned directly from raw pixels from multiple cameras and robot proprioception. Our approach outperforms policies learned from demonstrations on the real robot and requires 100 times fewer demonstrations, collected in simulation. More details and videos in https://sites.google.com/view/demostart.
RoboTAP: Tracking Arbitrary Points for Few-Shot Visual Imitation
Aug 31, 2023



For robots to be useful outside labs and specialized factories we need a way to teach them new useful behaviors quickly. Current approaches lack either the generality to onboard new tasks without task-specific engineering, or else lack the data-efficiency to do so in an amount of time that enables practical use. In this work we explore dense tracking as a representational vehicle to allow faster and more general learning from demonstration. Our approach utilizes Track-Any-Point (TAP) models to isolate the relevant motion in a demonstration, and parameterize a low-level controller to reproduce this motion across changes in the scene configuration. We show this results in robust robot policies that can solve complex object-arrangement tasks such as shape-matching, stacking, and even full path-following tasks such as applying glue and sticking objects together, all from demonstrations that can be collected in minutes.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
Lossless Adaptation of Pretrained Vision Models For Robotic Manipulation
Apr 13, 2023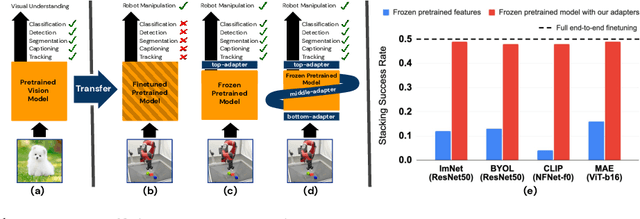
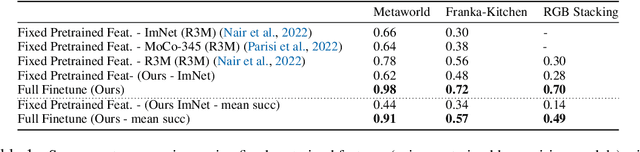
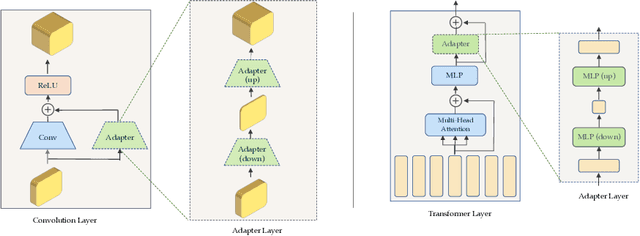

Recent works have shown that large models pretrained on common visual learning tasks can provide useful representations for a wide range of specialized perception problems, as well as a variety of robotic manipulation tasks. While prior work on robotic manipulation has predominantly used frozen pretrained features, we demonstrate that in robotics this approach can fail to reach optimal performance, and that fine-tuning of the full model can lead to significantly better results. Unfortunately, fine-tuning disrupts the pretrained visual representation, and causes representational drift towards the fine-tuned task thus leading to a loss of the versatility of the original model. We introduce "lossless adaptation" to address this shortcoming of classical fine-tuning. We demonstrate that appropriate placement of our parameter efficient adapters can significantly reduce the performance gap between frozen pretrained representations and full end-to-end fine-tuning without changes to the original representation and thus preserving original capabilities of the pretrained model. We perform a comprehensive investigation across three major model architectures (ViTs, NFNets, and ResNets), supervised (ImageNet-1K classification) and self-supervised pretrained weights (CLIP, BYOL, Visual MAE) in 3 task domains and 35 individual tasks, and demonstrate that our claims are strongly validated in various settings.
Few-Shot Keypoint Detection as Task Adaptation via Latent Embeddings
Dec 13, 2021
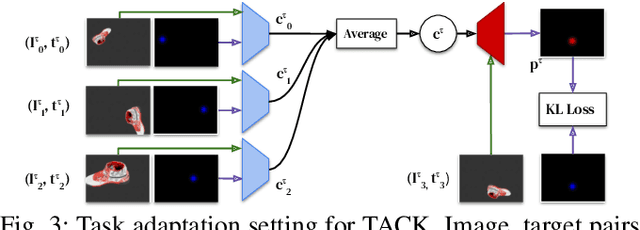
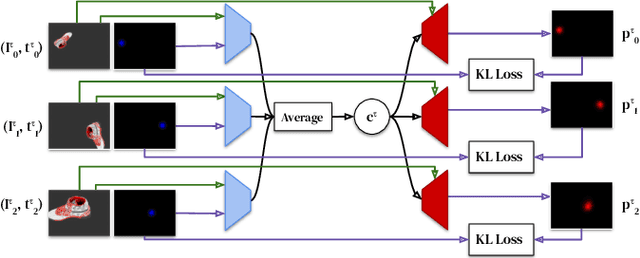
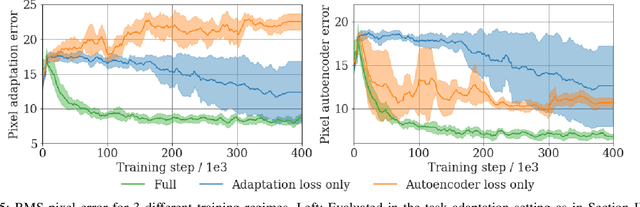
Dense object tracking, the ability to localize specific object points with pixel-level accuracy, is an important computer vision task with numerous downstream applications in robotics. Existing approaches either compute dense keypoint embeddings in a single forward pass, meaning the model is trained to track everything at once, or allocate their full capacity to a sparse predefined set of points, trading generality for accuracy. In this paper we explore a middle ground based on the observation that the number of relevant points at a given time are typically relatively few, e.g. grasp points on a target object. Our main contribution is a novel architecture, inspired by few-shot task adaptation, which allows a sparse-style network to condition on a keypoint embedding that indicates which point to track. Our central finding is that this approach provides the generality of dense-embedding models, while offering accuracy significantly closer to sparse-keypoint approaches. We present results illustrating this capacity vs. accuracy trade-off, and demonstrate the ability to zero-shot transfer to new object instances (within-class) using a real-robot pick-and-place task.
Wish you were here: Hindsight Goal Selection for long-horizon dexterous manipulation
Dec 02, 2021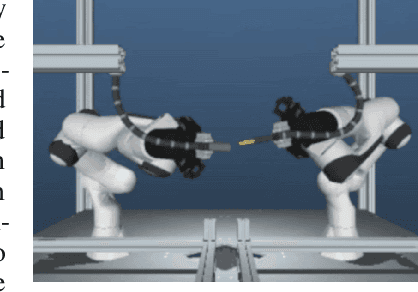
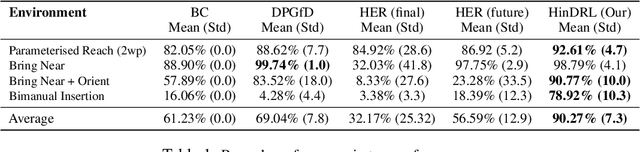
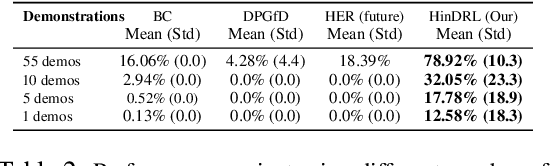
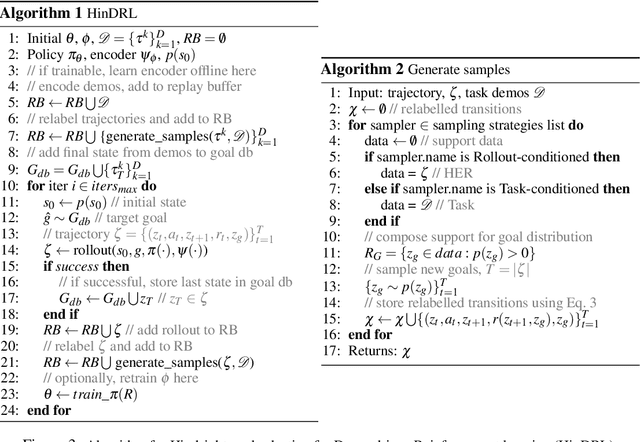
Complex sequential tasks in continuous-control settings often require agents to successfully traverse a set of "narrow passages" in their state space. Solving such tasks with a sparse reward in a sample-efficient manner poses a challenge to modern reinforcement learning (RL) due to the associated long-horizon nature of the problem and the lack of sufficient positive signal during learning. Various tools have been applied to address this challenge. When available, large sets of demonstrations can guide agent exploration. Hindsight relabelling on the other hand does not require additional sources of information. However, existing strategies explore based on task-agnostic goal distributions, which can render the solution of long-horizon tasks impractical. In this work, we extend hindsight relabelling mechanisms to guide exploration along task-specific distributions implied by a small set of successful demonstrations. We evaluate the approach on four complex, single and dual arm, robotics manipulation tasks against strong suitable baselines. The method requires far fewer demonstrations to solve all tasks and achieves a significantly higher overall performance as task complexity increases. Finally, we investigate the robustness of the proposed solution with respect to the quality of input representations and the number of demonstrations.
Offline Meta-Reinforcement Learning for Industrial Insertion
Oct 12, 2021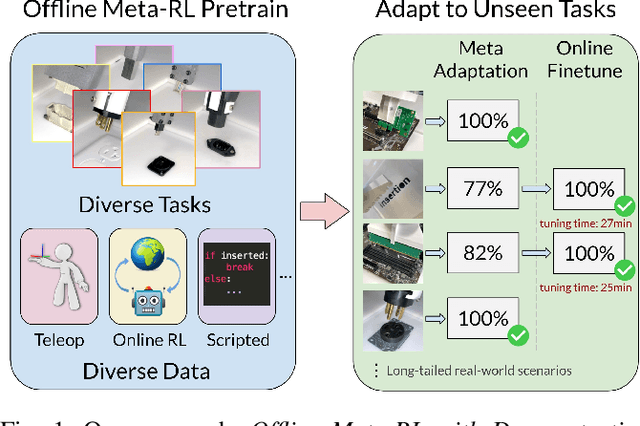
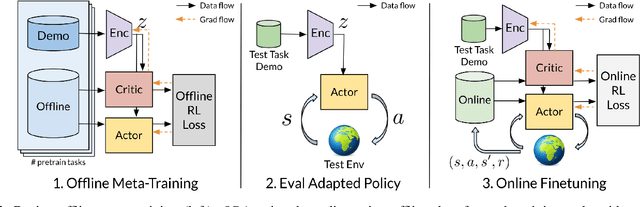

Reinforcement learning (RL) can in principle make it possible for robots to automatically adapt to new tasks, but in practice current RL methods require a very large number of trials to accomplish this. In this paper, we tackle rapid adaptation to new tasks through the framework of meta-learning, which utilizes past tasks to learn to adapt, with a specific focus on industrial insertion tasks. We address two specific challenges by applying meta-learning in this setting. First, conventional meta-RL algorithms require lengthy online meta-training phases. We show that this can be replaced with appropriately chosen offline data, resulting in an offline meta-RL method that only requires demonstrations and trials from each of the prior tasks, without the need to run costly meta-RL procedures online. Second, meta-RL methods can fail to generalize to new tasks that are too different from those seen at meta-training time, which poses a particular challenge in industrial applications, where high success rates are critical. We address this by combining contextual meta-learning with direct online finetuning: if the new task is similar to those seen in the prior data, then the contextual meta-learner adapts immediately, and if it is too different, it gradually adapts through finetuning. We show that our approach is able to quickly adapt to a variety of different insertion tasks, learning how to perform them with a success rate of 100% using only a fraction of the samples needed for learning the tasks from scratch. Experiment videos and details are available at https://sites.google.com/view/offline-metarl-insertion.
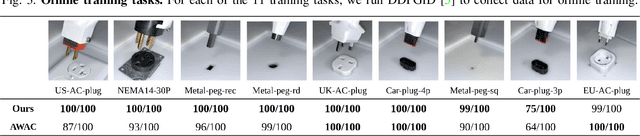
Robust Multi-Modal Policies for Industrial Assembly via Reinforcement Learning and Demonstrations: A Large-Scale Study
Mar 23, 2021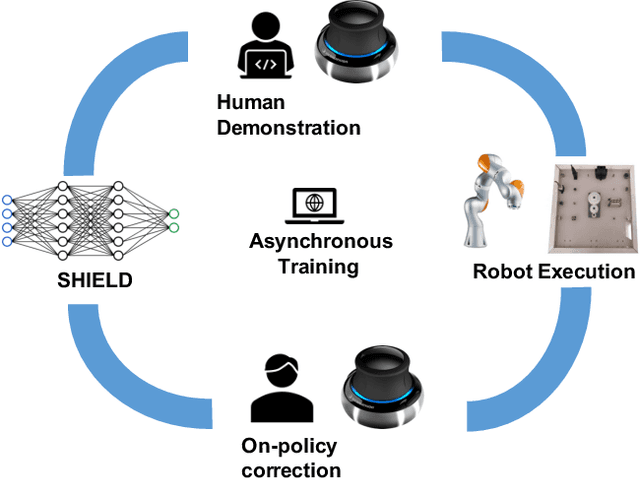
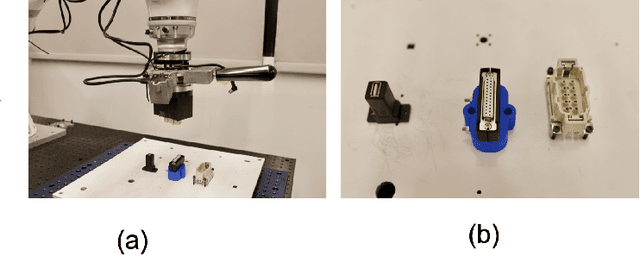
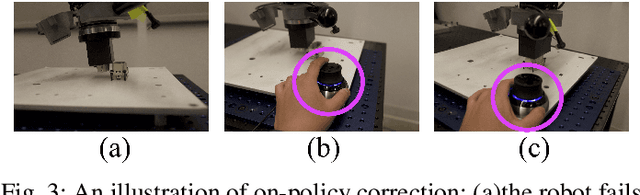
Over the past several years there has been a considerable research investment into learning-based approaches to industrial assembly, but despite significant progress these techniques have yet to be adopted by industry. We argue that it is the prohibitively large design space for Deep Reinforcement Learning (DRL), rather than algorithmic limitations per se, that are truly responsible for this lack of adoption. Pushing these techniques into the industrial mainstream requires an industry-oriented paradigm which differs significantly from the academic mindset. In this paper we define criteria for industry-oriented DRL, and perform a thorough comparison according to these criteria of one family of learning approaches, DRL from demonstration, against a professional industrial integrator on the recently established NIST assembly benchmark. We explain the design choices, representing several years of investigation, which enabled our DRL system to consistently outperform the integrator baseline in terms of both speed and reliability. Finally, we conclude with a competition between our DRL system and a human on a challenge task of insertion into a randomly moving target. This study suggests that DRL is capable of outperforming not only established engineered approaches, but the human motor system as well, and that there remains significant room for improvement. Videos can be found on our project website: https://sites.google.com/view/shield-nist.
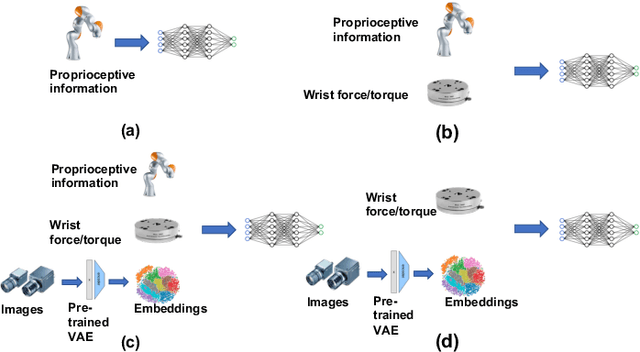
A Practical Approach to Insertion with Variable Socket Position Using Deep Reinforcement Learning
Oct 08, 2018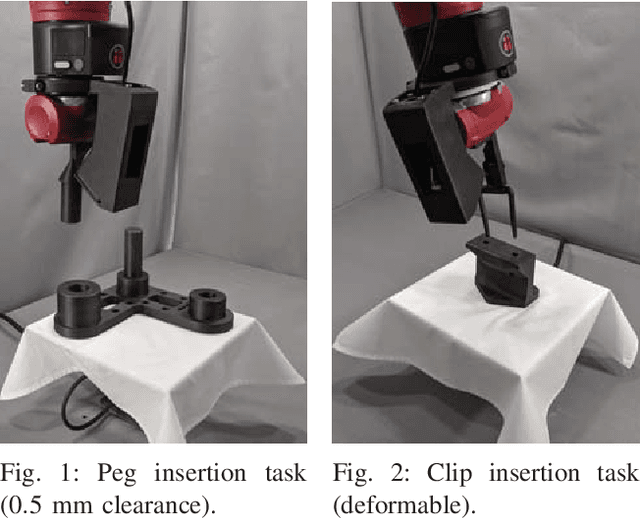
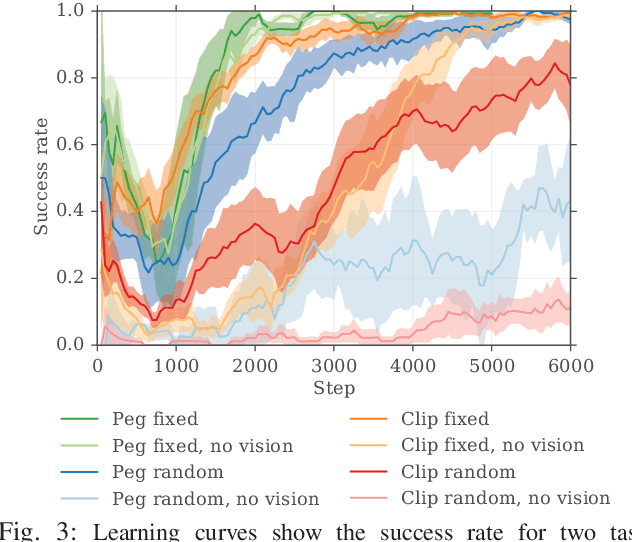
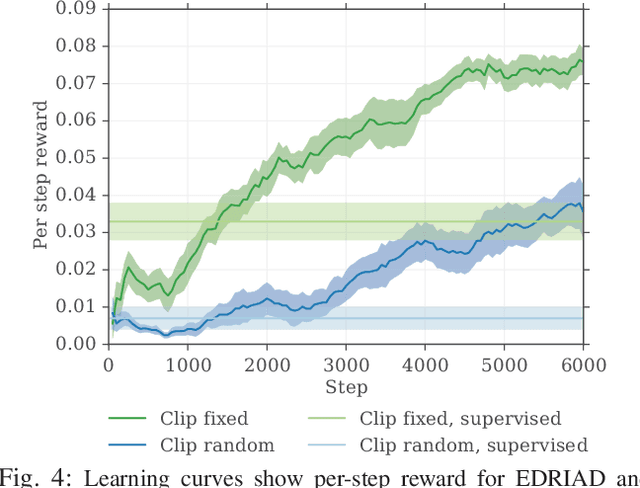
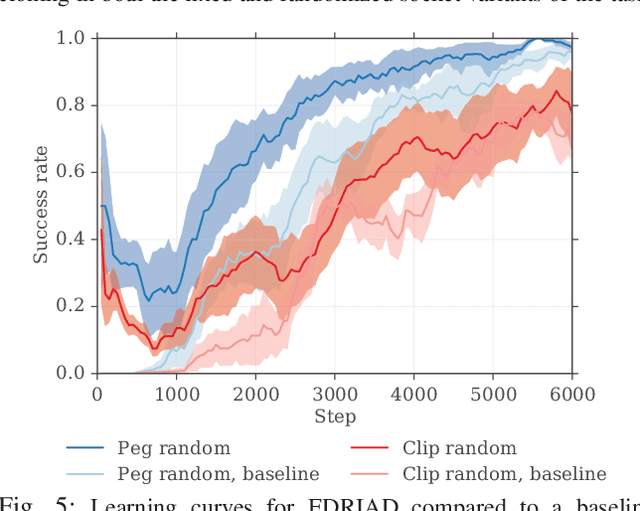
Insertion is a challenging haptic and visual control problem with significant practical value for manufacturing. Existing approaches in the model-based robotics community can be highly effective when task geometry is known, but are complex and cumbersome to implement, and must be tailored to each individual problem by a qualified engineer. Within the learning community there is a long history of insertion research, but existing approaches are typically either too sample-inefficient to run on real robots, or assume access to high-level object features, e.g. socket pose. In this paper we show that relatively minor modifications to an off-the-shelf Deep-RL algorithm (DDPG), combined with a small number of human demonstrations, allows the robot to quickly learn to solve these tasks efficiently and robustly. Our approach requires no modeling or simulation, no parameterized search or alignment behaviors, no vision system aside from raw images, and no reward shaping. We evaluate our approach on a narrow-clearance peg-insertion task and a deformable clip-insertion task, both of which include variability in the socket position. Our results show that these tasks can be solved reliably on the real robot in less than 10 minutes of interaction time, and that the resulting policies are robust to variance in the socket position and orientation.