 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Paper and Code
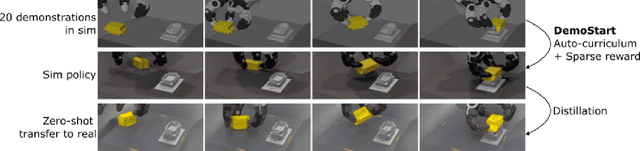
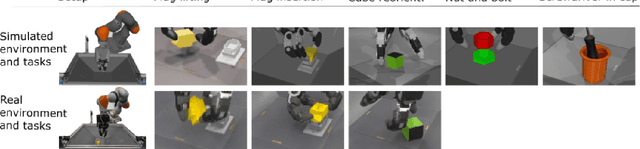
We present DemoStart, a novel auto-curriculum reinforcement learning method capable of learning complex manipulation behaviors on an arm equipped with a three-fingered robotic hand, from only a sparse reward and a handful of demonstrations in simulation. Learning from simulation drastically reduces the development cycle of behavior generation, and domain randomization techniques are leveraged to achieve successful zero-shot sim-to-real transfer. Transferred policies are learned directly from raw pixels from multiple cameras and robot proprioception. Our approach outperforms policies learned from demonstrations on the real robot and requires 100 times fewer demonstrations, collected in simulation. More details and videos in https://sites.google.com/view/demostart.