 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Sep 10, 2024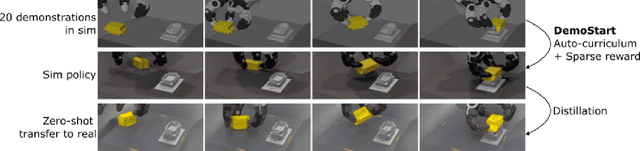
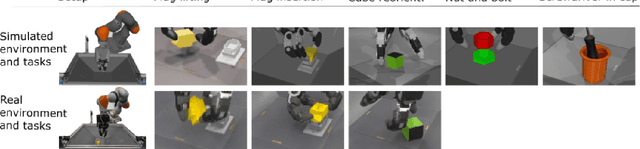
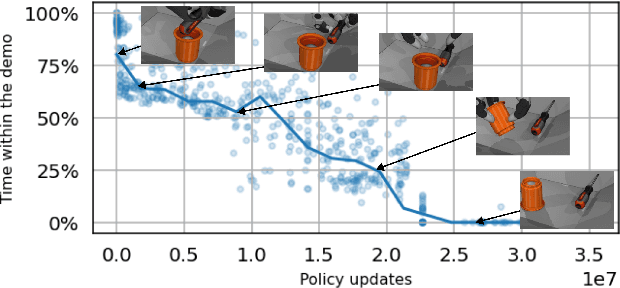
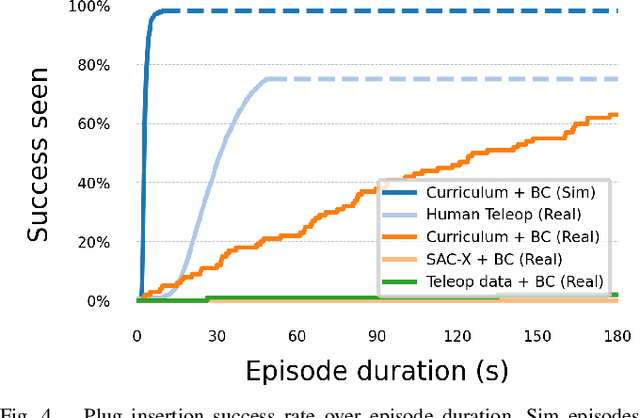
We present DemoStart, a novel auto-curriculum reinforcement learning method capable of learning complex manipulation behaviors on an arm equipped with a three-fingered robotic hand, from only a sparse reward and a handful of demonstrations in simulation. Learning from simulation drastically reduces the development cycle of behavior generation, and domain randomization techniques are leveraged to achieve successful zero-shot sim-to-real transfer. Transferred policies are learned directly from raw pixels from multiple cameras and robot proprioception. Our approach outperforms policies learned from demonstrations on the real robot and requires 100 times fewer demonstrations, collected in simulation. More details and videos in https://sites.google.com/view/demostart.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
Towards Compute-Optimal Transfer Learning
Apr 25, 2023



The field of transfer learning is undergoing a significant shift with the introduction of large pretrained models which have demonstrated strong adaptability to a variety of downstream tasks. However, the high computational and memory requirements to finetune or use these models can be a hindrance to their widespread use. In this study, we present a solution to this issue by proposing a simple yet effective way to trade computational efficiency for asymptotic performance which we define as the performance a learning algorithm achieves as compute tends to infinity. Specifically, we argue that zero-shot structured pruning of pretrained models allows them to increase compute efficiency with minimal reduction in performance. We evaluate our method on the Nevis'22 continual learning benchmark that offers a diverse set of transfer scenarios. Our results show that pruning convolutional filters of pretrained models can lead to more than 20% performance improvement in low computational regimes.
Leveraging Jumpy Models for Planning and Fast Learning in Robotic Domains
Feb 24, 2023



In this paper we study the problem of learning multi-step dynamics prediction models (jumpy models) from unlabeled experience and their utility for fast inference of (high-level) plans in downstream tasks. In particular we propose to learn a jumpy model alongside a skill embedding space offline, from previously collected experience for which no labels or reward annotations are required. We then investigate several options of harnessing those learned components in combination with model-based planning or model-free reinforcement learning (RL) to speed up learning on downstream tasks. We conduct a set of experiments in the RGB-stacking environment, showing that planning with the learned skills and the associated model can enable zero-shot generalization to new tasks, and can further speed up training of policies via reinforcement learning. These experiments demonstrate that jumpy models which incorporate temporal abstraction can facilitate planning in long-horizon tasks in which standard dynamics models fail.
SkillS: Adaptive Skill Sequencing for Efficient Temporally-Extended Exploration
Dec 03, 2022


The ability to effectively reuse prior knowledge is a key requirement when building general and flexible Reinforcement Learning (RL) agents. Skill reuse is one of the most common approaches, but current methods have considerable limitations.For example, fine-tuning an existing policy frequently fails, as the policy can degrade rapidly early in training. In a similar vein, distillation of expert behavior can lead to poor results when given sub-optimal experts. We compare several common approaches for skill transfer on multiple domains including changes in task and system dynamics. We identify how existing methods can fail and introduce an alternative approach to mitigate these problems. Our approach learns to sequence existing temporally-extended skills for exploration but learns the final policy directly from the raw experience. This conceptual split enables rapid adaptation and thus efficient data collection but without constraining the final solution.It significantly outperforms many classical methods across a suite of evaluation tasks and we use a broad set of ablations to highlight the importance of differentc omponents of our method.
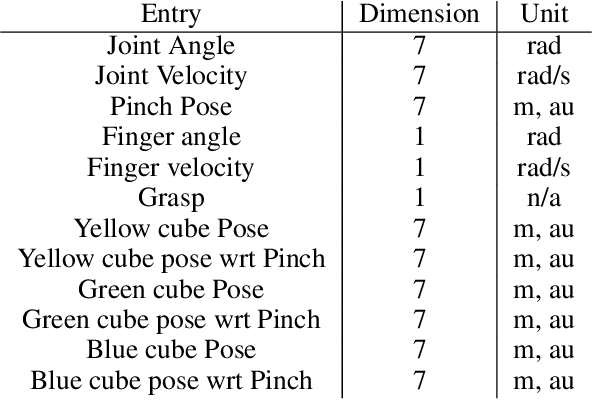
MO2: Model-Based Offline Options
Sep 05, 2022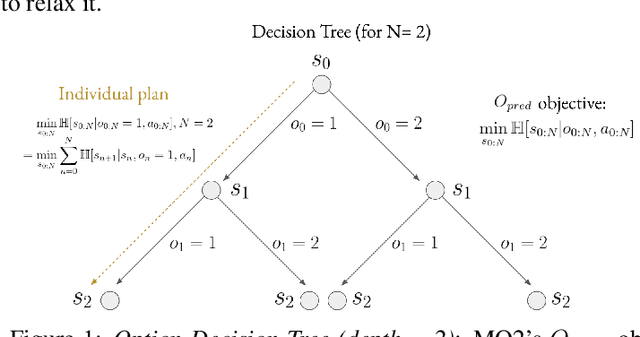

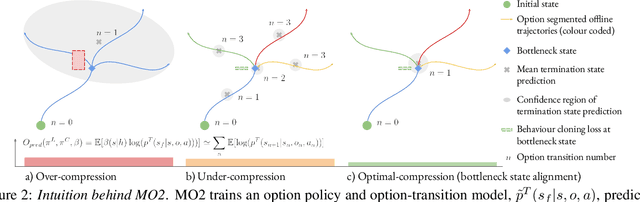
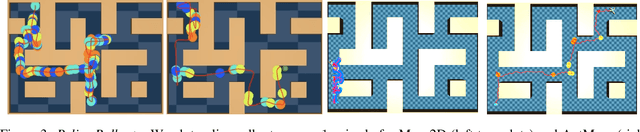
The ability to discover useful behaviours from past experience and transfer them to new tasks is considered a core component of natural embodied intelligence. Inspired by neuroscience, discovering behaviours that switch at bottleneck states have been long sought after for inducing plans of minimum description length across tasks. Prior approaches have either only supported online, on-policy, bottleneck state discovery, limiting sample-efficiency, or discrete state-action domains, restricting applicability. To address this, we introduce Model-Based Offline Options (MO2), an offline hindsight framework supporting sample-efficient bottleneck option discovery over continuous state-action spaces. Once bottleneck options are learnt offline over source domains, they are transferred online to improve exploration and value estimation on the transfer domain. Our experiments show that on complex long-horizon continuous control tasks with sparse, delayed rewards, MO2's properties are essential and lead to performance exceeding recent option learning methods. Additional ablations further demonstrate the impact on option predictability and credit assignment.
Offline Distillation for Robot Lifelong Learning with Imbalanced Experience
Apr 12, 2022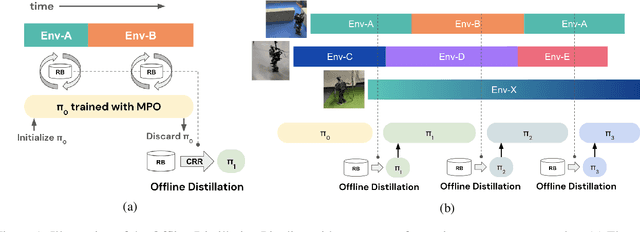
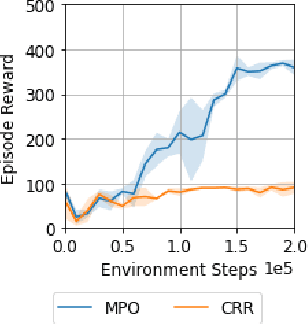
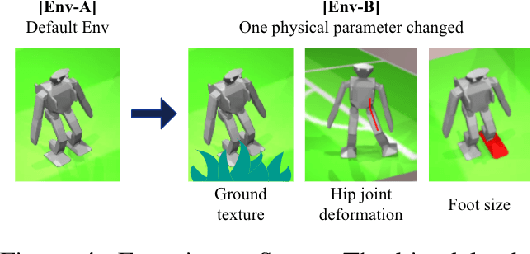
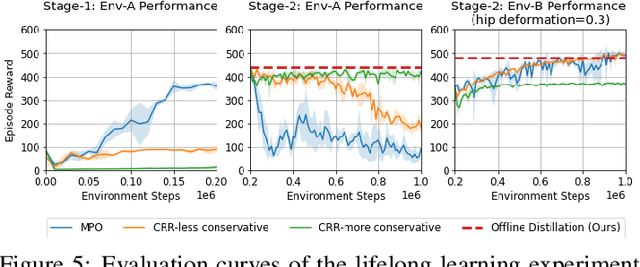
Robots will experience non-stationary environment dynamics throughout their lifetime: the robot dynamics can change due to wear and tear, or its surroundings may change over time. Eventually, the robots should perform well in all of the environment variations it has encountered. At the same time, it should still be able to learn fast in a new environment. We investigate two challenges in such a lifelong learning setting: first, existing off-policy algorithms struggle with the trade-off between being conservative to maintain good performance in the old environment and learning efficiently in the new environment. We propose the Offline Distillation Pipeline to break this trade-off by separating the training procedure into interleaved phases of online interaction and offline distillation. Second, training with the combined datasets from multiple environments across the lifetime might create a significant performance drop compared to training on the datasets individually. Our hypothesis is that both the imbalanced quality and size of the datasets exacerbate the extrapolation error of the Q-function during offline training over the "weaker" dataset. We propose a simple fix to the issue by keeping the policy closer to the dataset during the distillation phase. In the experiments, we demonstrate these challenges and the proposed solutions with a simulated bipedal robot walking task across various environment changes. We show that the Offline Distillation Pipeline achieves better performance across all the encountered environments without affecting data collection. We also provide a comprehensive empirical study to support our hypothesis on the data imbalance issue.
Learning Transferable Motor Skills with Hierarchical Latent Mixture Policies
Dec 09, 2021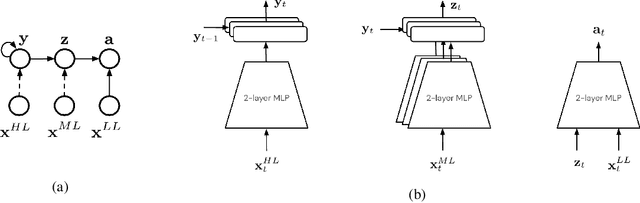
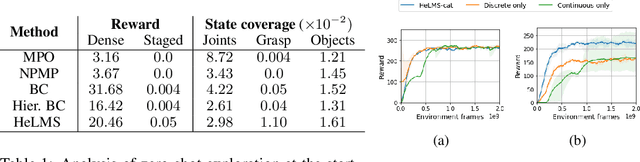

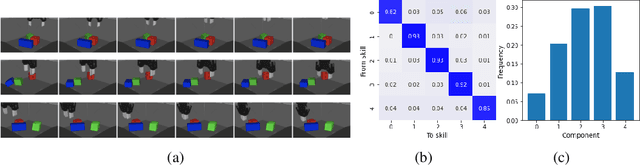
For robots operating in the real world, it is desirable to learn reusable behaviours that can effectively be transferred and adapted to numerous tasks and scenarios. We propose an approach to learn abstract motor skills from data using a hierarchical mixture latent variable model. In contrast to existing work, our method exploits a three-level hierarchy of both discrete and continuous latent variables, to capture a set of high-level behaviours while allowing for variance in how they are executed. We demonstrate in manipulation domains that the method can effectively cluster offline data into distinct, executable behaviours, while retaining the flexibility of a continuous latent variable model. The resulting skills can be transferred and fine-tuned on new tasks, unseen objects, and from state to vision-based policies, yielding better sample efficiency and asymptotic performance compared to existing skill- and imitation-based methods. We further analyse how and when the skills are most beneficial: they encourage directed exploration to cover large regions of the state space relevant to the task, making them most effective in challenging sparse-reward settings.
Task-agnostic Continual Learning with Hybrid Probabilistic Models
Jun 24, 2021



Learning new tasks continuously without forgetting on a constantly changing data distribution is essential for real-world problems but extremely challenging for modern deep learning. In this work we propose HCL, a Hybrid generative-discriminative approach to Continual Learning for classification. We model the distribution of each task and each class with a normalizing flow. The flow is used to learn the data distribution, perform classification, identify task changes, and avoid forgetting, all leveraging the invertibility and exact likelihood which are uniquely enabled by the normalizing flow model. We use the generative capabilities of the flow to avoid catastrophic forgetting through generative replay and a novel functional regularization technique. For task identification, we use state-of-the-art anomaly detection techniques based on measuring the typicality of the model's statistics. We demonstrate the strong performance of HCL on a range of continual learning benchmarks such as split-MNIST, split-CIFAR, and SVHN-MNIST.