 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNFQ2.0: The CartPole Benchmark Revisited
Nov 16, 2025



This article revisits the 20-year-old neural fitted Q-iteration (NFQ) algorithm on its classical CartPole benchmark. NFQ was a pioneering approach towards modern Deep Reinforcement Learning (Deep RL) in applying multi-layer neural networks to reinforcement learning for real-world control problems. We explore the algorithm's conceptual simplicity and its transition from online to batch learning, which contributed to its stability. Despite its initial success, NFQ required extensive tuning and was not easily reproducible on real-world control problems. We propose a modernized variant NFQ2.0 and apply it to the CartPole task, concentrating on a real-world system build from standard industrial components, to investigate and improve the learning process's repeatability and robustness. Through ablation studies, we highlight key design decisions and hyperparameters that enhance performance and stability of NFQ2.0 over the original variant. Finally, we demonstrate how our findings can assist practitioners in reproducing and improving results and applying deep reinforcement learning more effectively in industrial contexts.
Improving cosmological reach of a gravitational wave observatory using Deep Loop Shaping
Sep 17, 2025Improved low-frequency sensitivity of gravitational wave observatories would unlock study of intermediate-mass black hole mergers, binary black hole eccentricity, and provide early warnings for multi-messenger observations of binary neutron star mergers. Today's mirror stabilization control injects harmful noise, constituting a major obstacle to sensitivity improvements. We eliminated this noise through Deep Loop Shaping, a reinforcement learning method using frequency domain rewards. We proved our methodology on the LIGO Livingston Observatory (LLO). Our controller reduced control noise in the 10--30Hz band by over 30x, and up to 100x in sub-bands surpassing the design goal motivated by the quantum limit. These results highlight the potential of Deep Loop Shaping to improve current and future GW observatories, and more broadly instrumentation and control systems.
Value from Observations: Towards Large-Scale Imitation Learning via Self-Improvement
Jul 09, 2025Imitation Learning from Observation (IfO) offers a powerful way to learn behaviors at large-scale: Unlike behavior cloning or offline reinforcement learning, IfO can leverage action-free demonstrations and thus circumvents the need for costly action-labeled demonstrations or reward functions. However, current IfO research focuses on idealized scenarios with mostly bimodal-quality data distributions, restricting the meaningfulness of the results. In contrast, this paper investigates more nuanced distributions and introduces a method to learn from such data, moving closer to a paradigm in which imitation learning can be performed iteratively via self-improvement. Our method adapts RL-based imitation learning to action-free demonstrations, using a value function to transfer information between expert and non-expert data. Through comprehensive evaluation, we delineate the relation between different data distributions and the applicability of algorithms and highlight the limitations of established methods. Our findings provide valuable insights for developing more robust and practical IfO techniques on a path to scalable behaviour learning.
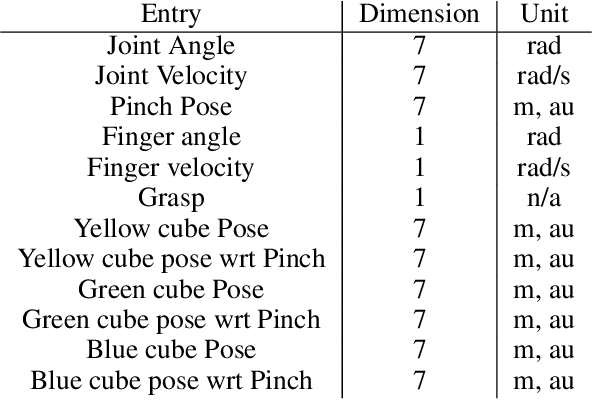
DemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
Sep 10, 2024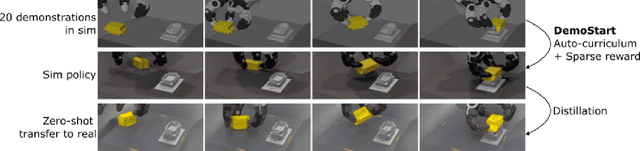
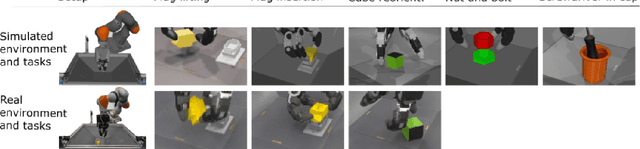
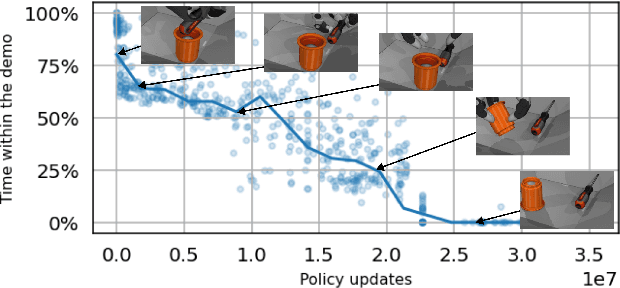
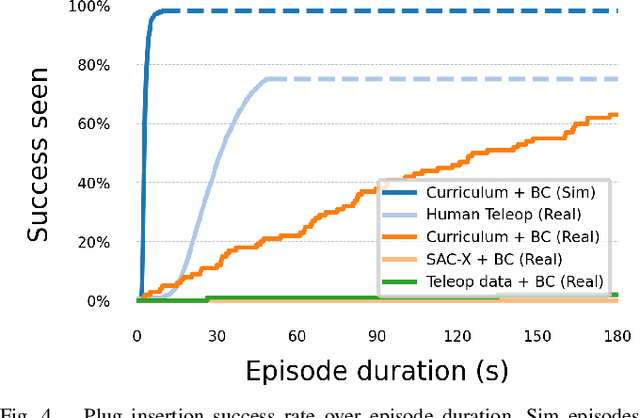
We present DemoStart, a novel auto-curriculum reinforcement learning method capable of learning complex manipulation behaviors on an arm equipped with a three-fingered robotic hand, from only a sparse reward and a handful of demonstrations in simulation. Learning from simulation drastically reduces the development cycle of behavior generation, and domain randomization techniques are leveraged to achieve successful zero-shot sim-to-real transfer. Transferred policies are learned directly from raw pixels from multiple cameras and robot proprioception. Our approach outperforms policies learned from demonstrations on the real robot and requires 100 times fewer demonstrations, collected in simulation. More details and videos in https://sites.google.com/view/demostart.
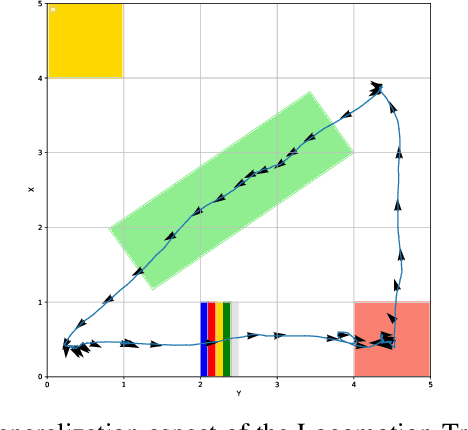
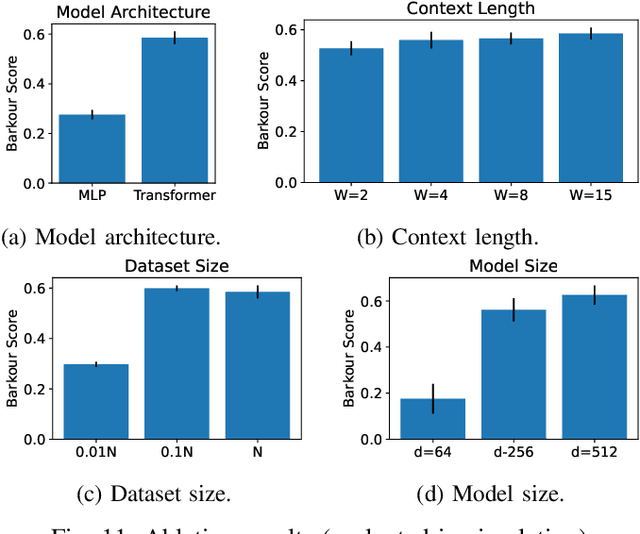
Offline Actor-Critic Reinforcement Learning Scales to Large Models
Feb 08, 2024



We show that offline actor-critic reinforcement learning can scale to large models - such as transformers - and follows similar scaling laws as supervised learning. We find that offline actor-critic algorithms can outperform strong, supervised, behavioral cloning baselines for multi-task training on a large dataset containing both sub-optimal and expert behavior on 132 continuous control tasks. We introduce a Perceiver-based actor-critic model and elucidate the key model features needed to make offline RL work with self- and cross-attention modules. Overall, we find that: i) simple offline actor critic algorithms are a natural choice for gradually moving away from the currently predominant paradigm of behavioral cloning, and ii) via offline RL it is possible to learn multi-task policies that master many domains simultaneously, including real robotics tasks, from sub-optimal demonstrations or self-generated data.
Mastering Stacking of Diverse Shapes with Large-Scale Iterative Reinforcement Learning on Real Robots
Dec 18, 2023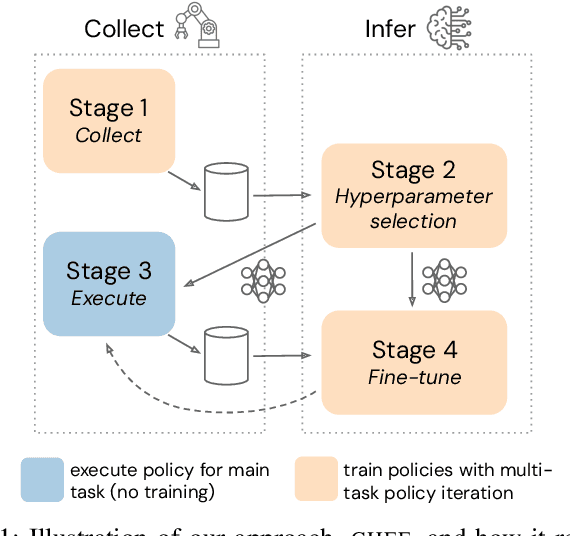
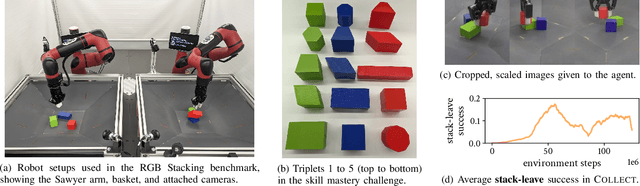

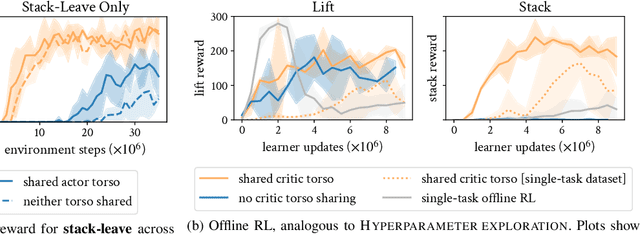
Reinforcement learning solely from an agent's self-generated data is often believed to be infeasible for learning on real robots, due to the amount of data needed. However, if done right, agents learning from real data can be surprisingly efficient through re-using previously collected sub-optimal data. In this paper we demonstrate how the increased understanding of off-policy learning methods and their embedding in an iterative online/offline scheme (``collect and infer'') can drastically improve data-efficiency by using all the collected experience, which empowers learning from real robot experience only. Moreover, the resulting policy improves significantly over the state of the art on a recently proposed real robot manipulation benchmark. Our approach learns end-to-end, directly from pixels, and does not rely on additional human domain knowledge such as a simulator or demonstrations.
Less is more -- the Dispatcher/ Executor principle for multi-task Reinforcement Learning
Dec 14, 2023Humans instinctively know how to neglect details when it comes to solve complex decision making problems in environments with unforeseeable variations. This abstraction process seems to be a vital property for most biological systems and helps to 'abstract away' unnecessary details and boost generalisation. In this work we introduce the dispatcher/ executor principle for the design of multi-task Reinforcement Learning controllers. It suggests to partition the controller in two entities, one that understands the task (the dispatcher) and one that computes the controls for the specific device (the executor) - and to connect these two by a strongly regularizing communication channel. The core rationale behind this position paper is that changes in structure and design principles can improve generalisation properties and drastically enforce data-efficiency. It is in some sense a 'yes, and ...' response to the current trend of using large neural networks trained on vast amounts of data and bet on emerging generalisation properties. While we agree on the power of scaling - in the sense of Sutton's 'bitter lesson' - we will give some evidence, that considering structure and adding design principles can be a valuable and critical component in particular when data is not abundant and infinite, but is a precious resource.
Barkour: Benchmarking Animal-level Agility with Quadruped Robots
May 24, 2023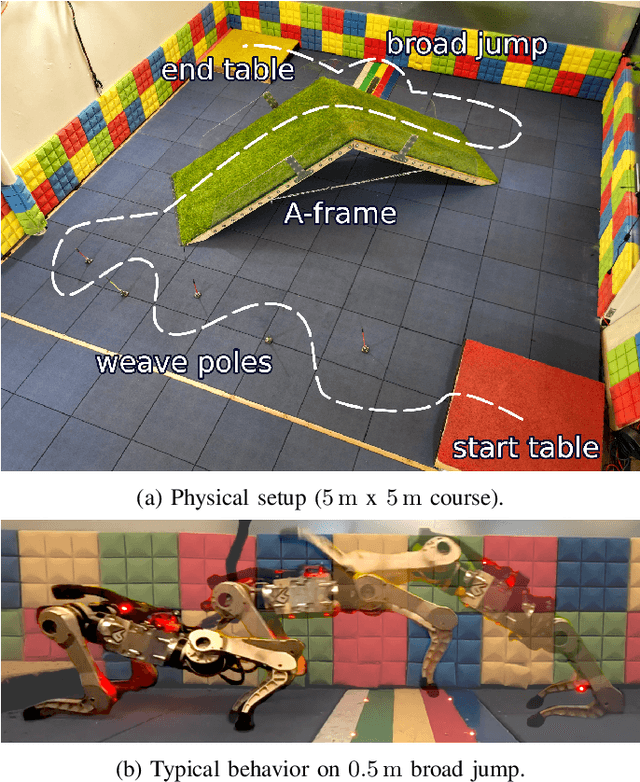
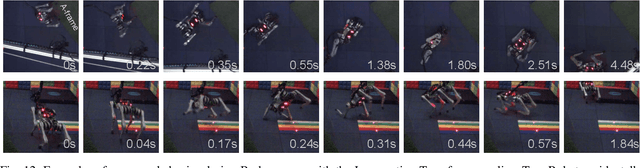
Animals have evolved various agile locomotion strategies, such as sprinting, leaping, and jumping. There is a growing interest in developing legged robots that move like their biological counterparts and show various agile skills to navigate complex environments quickly. Despite the interest, the field lacks systematic benchmarks to measure the performance of control policies and hardware in agility. We introduce the Barkour benchmark, an obstacle course to quantify agility for legged robots. Inspired by dog agility competitions, it consists of diverse obstacles and a time based scoring mechanism. This encourages researchers to develop controllers that not only move fast, but do so in a controllable and versatile way. To set strong baselines, we present two methods for tackling the benchmark. In the first approach, we train specialist locomotion skills using on-policy reinforcement learning methods and combine them with a high-level navigation controller. In the second approach, we distill the specialist skills into a Transformer-based generalist locomotion policy, named Locomotion-Transformer, that can handle various terrains and adjust the robot's gait based on the perceived environment and robot states. Using a custom-built quadruped robot, we demonstrate that our method can complete the course at half the speed of a dog. We hope that our work represents a step towards creating controllers that enable robots to reach animal-level agility.
Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
Apr 26, 2023We investigate whether Deep Reinforcement Learning (Deep RL) is able to synthesize sophisticated and safe movement skills for a low-cost, miniature humanoid robot that can be composed into complex behavioral strategies in dynamic environments. We used Deep RL to train a humanoid robot with 20 actuated joints to play a simplified one-versus-one (1v1) soccer game. We first trained individual skills in isolation and then composed those skills end-to-end in a self-play setting. The resulting policy exhibits robust and dynamic movement skills such as rapid fall recovery, walking, turning, kicking and more; and transitions between them in a smooth, stable, and efficient manner - well beyond what is intuitively expected from the robot. The agents also developed a basic strategic understanding of the game, and learned, for instance, to anticipate ball movements and to block opponent shots. The full range of behaviors emerged from a small set of simple rewards. Our agents were trained in simulation and transferred to real robots zero-shot. We found that a combination of sufficiently high-frequency control, targeted dynamics randomization, and perturbations during training in simulation enabled good-quality transfer, despite significant unmodeled effects and variations across robot instances. Although the robots are inherently fragile, minor hardware modifications together with basic regularization of the behavior during training led the robots to learn safe and effective movements while still performing in a dynamic and agile way. Indeed, even though the agents were optimized for scoring, in experiments they walked 156% faster, took 63% less time to get up, and kicked 24% faster than a scripted baseline, while efficiently combining the skills to achieve the longer term objectives. Examples of the emergent behaviors and full 1v1 matches are available on the supplementary website.
SkillS: Adaptive Skill Sequencing for Efficient Temporally-Extended Exploration
Dec 03, 2022


The ability to effectively reuse prior knowledge is a key requirement when building general and flexible Reinforcement Learning (RL) agents. Skill reuse is one of the most common approaches, but current methods have considerable limitations.For example, fine-tuning an existing policy frequently fails, as the policy can degrade rapidly early in training. In a similar vein, distillation of expert behavior can lead to poor results when given sub-optimal experts. We compare several common approaches for skill transfer on multiple domains including changes in task and system dynamics. We identify how existing methods can fail and introduce an alternative approach to mitigate these problems. Our approach learns to sequence existing temporally-extended skills for exploration but learns the final policy directly from the raw experience. This conceptual split enables rapid adaptation and thus efficient data collection but without constraining the final solution.It significantly outperforms many classical methods across a suite of evaluation tasks and we use a broad set of ablations to highlight the importance of differentc omponents of our method.