 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving cosmological reach of a gravitational wave observatory using Deep Loop Shaping
Sep 17, 2025Improved low-frequency sensitivity of gravitational wave observatories would unlock study of intermediate-mass black hole mergers, binary black hole eccentricity, and provide early warnings for multi-messenger observations of binary neutron star mergers. Today's mirror stabilization control injects harmful noise, constituting a major obstacle to sensitivity improvements. We eliminated this noise through Deep Loop Shaping, a reinforcement learning method using frequency domain rewards. We proved our methodology on the LIGO Livingston Observatory (LLO). Our controller reduced control noise in the 10--30Hz band by over 30x, and up to 100x in sub-bands surpassing the design goal motivated by the quantum limit. These results highlight the potential of Deep Loop Shaping to improve current and future GW observatories, and more broadly instrumentation and control systems.
Value from Observations: Towards Large-Scale Imitation Learning via Self-Improvement
Jul 09, 2025Imitation Learning from Observation (IfO) offers a powerful way to learn behaviors at large-scale: Unlike behavior cloning or offline reinforcement learning, IfO can leverage action-free demonstrations and thus circumvents the need for costly action-labeled demonstrations or reward functions. However, current IfO research focuses on idealized scenarios with mostly bimodal-quality data distributions, restricting the meaningfulness of the results. In contrast, this paper investigates more nuanced distributions and introduces a method to learn from such data, moving closer to a paradigm in which imitation learning can be performed iteratively via self-improvement. Our method adapts RL-based imitation learning to action-free demonstrations, using a value function to transfer information between expert and non-expert data. Through comprehensive evaluation, we delineate the relation between different data distributions and the applicability of algorithms and highlight the limitations of established methods. Our findings provide valuable insights for developing more robust and practical IfO techniques on a path to scalable behaviour learning.
Preference Optimization as Probabilistic Inference
Oct 05, 2024
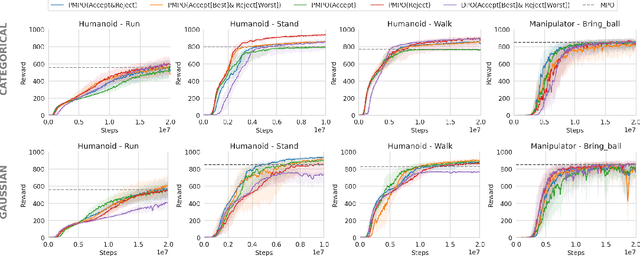
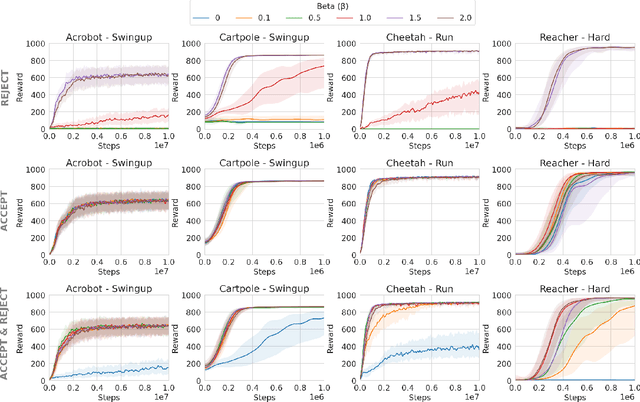
Existing preference optimization methods are mainly designed for directly learning from human feedback with the assumption that paired examples (preferred vs. dis-preferred) are available. In contrast, we propose a method that can leverage unpaired preferred or dis-preferred examples, and works even when only one type of feedback (positive or negative) is available. This flexibility allows us to apply it in scenarios with varying forms of feedback and models, including training generative language models based on human feedback as well as training policies for sequential decision-making problems, where learned (value) functions are available. Our approach builds upon the probabilistic framework introduced in (Dayan and Hinton, 1997), which proposes to use expectation-maximization (EM) to directly optimize the probability of preferred outcomes (as opposed to classic expected reward maximization). To obtain a practical algorithm, we identify and address a key limitation in current EM-based methods: when applied to preference optimization, they solely maximize the likelihood of preferred examples, while neglecting dis-preferred samples. We show how one can extend EM algorithms to explicitly incorporate dis-preferred outcomes, leading to a novel, theoretically grounded, preference optimization algorithm that offers an intuitive and versatile way to learn from both positive and negative feedback.
Game On: Towards Language Models as RL Experimenters
Sep 05, 2024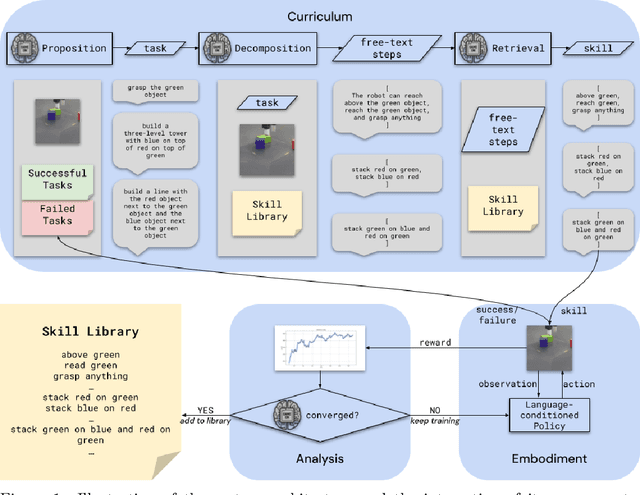

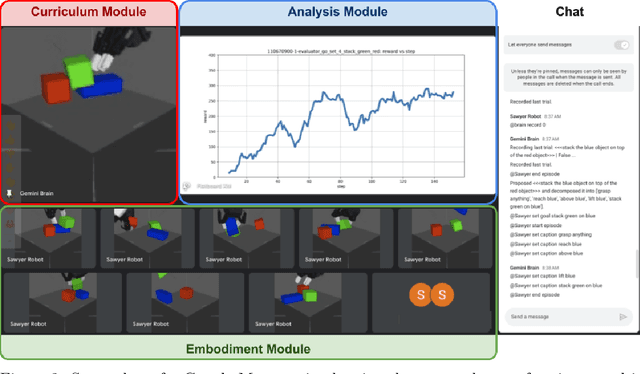
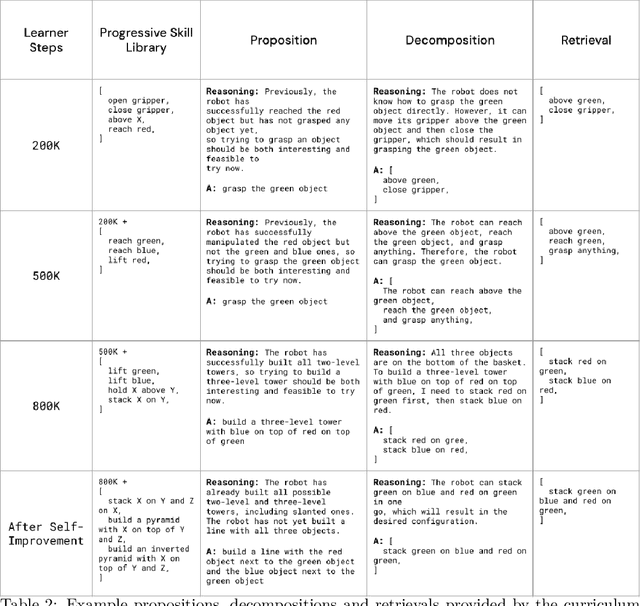
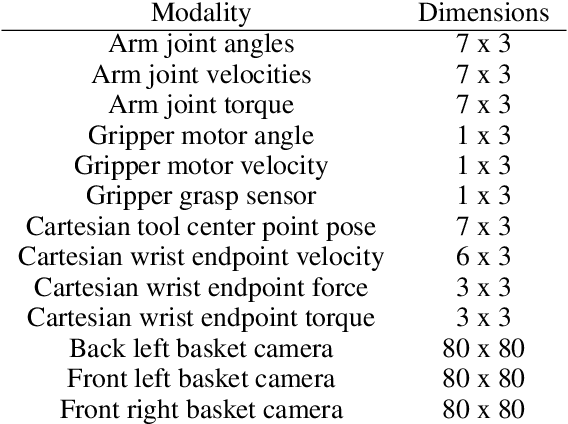
We propose an agent architecture that automates parts of the common reinforcement learning experiment workflow, to enable automated mastery of control domains for embodied agents. To do so, it leverages a VLM to perform some of the capabilities normally required of a human experimenter, including the monitoring and analysis of experiment progress, the proposition of new tasks based on past successes and failures of the agent, decomposing tasks into a sequence of subtasks (skills), and retrieval of the skill to execute - enabling our system to build automated curricula for learning. We believe this is one of the first proposals for a system that leverages a VLM throughout the full experiment cycle of reinforcement learning. We provide a first prototype of this system, and examine the feasibility of current models and techniques for the desired level of automation. For this, we use a standard Gemini model, without additional fine-tuning, to provide a curriculum of skills to a language-conditioned Actor-Critic algorithm, in order to steer data collection so as to aid learning new skills. Data collected in this way is shown to be useful for learning and iteratively improving control policies in a robotics domain. Additional examination of the ability of the system to build a growing library of skills, and to judge the progress of the training of those skills, also shows promising results, suggesting that the proposed architecture provides a potential recipe for fully automated mastery of tasks and domains for embodied agents.
Real-World Fluid Directed Rigid Body Control via Deep Reinforcement Learning
Feb 08, 2024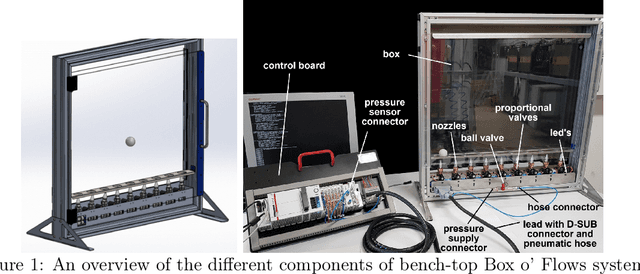

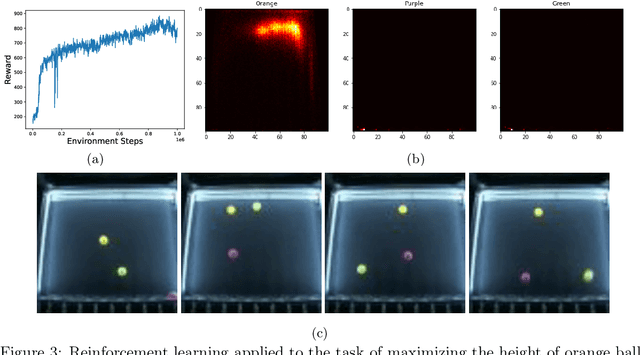
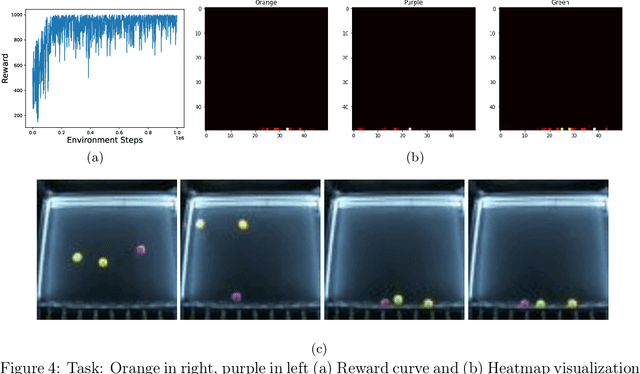
Recent advances in real-world applications of reinforcement learning (RL) have relied on the ability to accurately simulate systems at scale. However, domains such as fluid dynamical systems exhibit complex dynamic phenomena that are hard to simulate at high integration rates, limiting the direct application of modern deep RL algorithms to often expensive or safety critical hardware. In this work, we introduce "Box o Flows", a novel benchtop experimental control system for systematically evaluating RL algorithms in dynamic real-world scenarios. We describe the key components of the Box o Flows, and through a series of experiments demonstrate how state-of-the-art model-free RL algorithms can synthesize a variety of complex behaviors via simple reward specifications. Furthermore, we explore the role of offline RL in data-efficient hypothesis testing by reusing past experiences. We believe that the insights gained from this preliminary study and the availability of systems like the Box o Flows support the way forward for developing systematic RL algorithms that can be generally applied to complex, dynamical systems. Supplementary material and videos of experiments are available at https://sites.google.com/view/box-o-flows/home.
Offline Actor-Critic Reinforcement Learning Scales to Large Models
Feb 08, 2024



We show that offline actor-critic reinforcement learning can scale to large models - such as transformers - and follows similar scaling laws as supervised learning. We find that offline actor-critic algorithms can outperform strong, supervised, behavioral cloning baselines for multi-task training on a large dataset containing both sub-optimal and expert behavior on 132 continuous control tasks. We introduce a Perceiver-based actor-critic model and elucidate the key model features needed to make offline RL work with self- and cross-attention modules. Overall, we find that: i) simple offline actor critic algorithms are a natural choice for gradually moving away from the currently predominant paradigm of behavioral cloning, and ii) via offline RL it is possible to learn multi-task policies that master many domains simultaneously, including real robotics tasks, from sub-optimal demonstrations or self-generated data.
Mastering Stacking of Diverse Shapes with Large-Scale Iterative Reinforcement Learning on Real Robots
Dec 18, 2023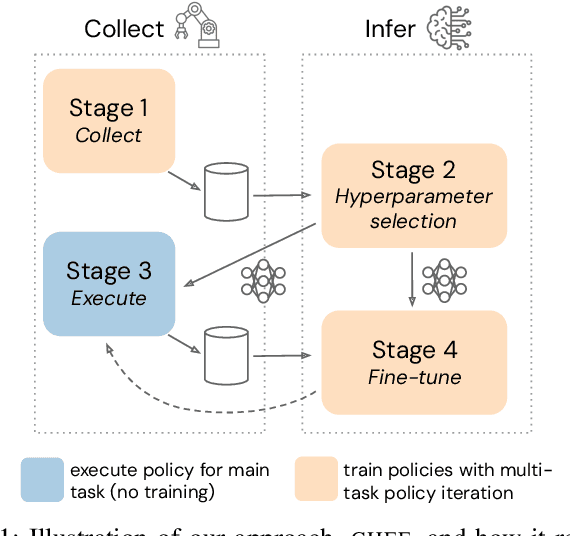
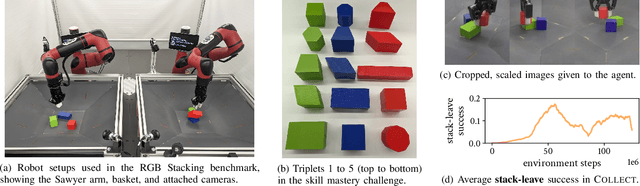

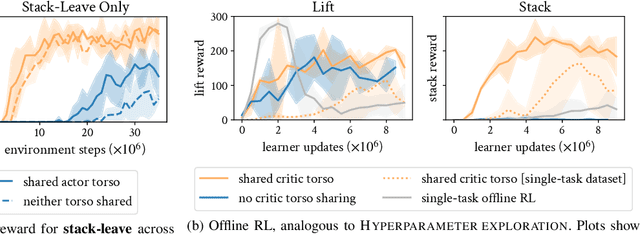
Reinforcement learning solely from an agent's self-generated data is often believed to be infeasible for learning on real robots, due to the amount of data needed. However, if done right, agents learning from real data can be surprisingly efficient through re-using previously collected sub-optimal data. In this paper we demonstrate how the increased understanding of off-policy learning methods and their embedding in an iterative online/offline scheme (``collect and infer'') can drastically improve data-efficiency by using all the collected experience, which empowers learning from real robot experience only. Moreover, the resulting policy improves significantly over the state of the art on a recently proposed real robot manipulation benchmark. Our approach learns end-to-end, directly from pixels, and does not rely on additional human domain knowledge such as a simulator or demonstrations.
Policy composition in reinforcement learning via multi-objective policy optimization
Aug 30, 2023We enable reinforcement learning agents to learn successful behavior policies by utilizing relevant pre-existing teacher policies. The teacher policies are introduced as objectives, in addition to the task objective, in a multi-objective policy optimization setting. Using the Multi-Objective Maximum a Posteriori Policy Optimization algorithm (Abdolmaleki et al. 2020), we show that teacher policies can help speed up learning, particularly in the absence of shaping rewards. In two domains with continuous observation and action spaces, our agents successfully compose teacher policies in sequence and in parallel, and are also able to further extend the policies of the teachers in order to solve the task. Depending on the specified combination of task and teacher(s), teacher(s) may naturally act to limit the final performance of an agent. The extent to which agents are required to adhere to teacher policies are determined by hyperparameters which determine both the effect of teachers on learning speed and the eventual performance of the agent on the task. In the humanoid domain (Tassa et al. 2018), we also equip agents with the ability to control the selection of teachers. With this ability, agents are able to meaningfully compose from the teacher policies to achieve a superior task reward on the walk task than in cases without access to the teacher policies. We show the resemblance of composed task policies with the corresponding teacher policies through videos.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
Leveraging Jumpy Models for Planning and Fast Learning in Robotic Domains
Feb 24, 2023



In this paper we study the problem of learning multi-step dynamics prediction models (jumpy models) from unlabeled experience and their utility for fast inference of (high-level) plans in downstream tasks. In particular we propose to learn a jumpy model alongside a skill embedding space offline, from previously collected experience for which no labels or reward annotations are required. We then investigate several options of harnessing those learned components in combination with model-based planning or model-free reinforcement learning (RL) to speed up learning on downstream tasks. We conduct a set of experiments in the RGB-stacking environment, showing that planning with the learned skills and the associated model can enable zero-shot generalization to new tasks, and can further speed up training of policies via reinforcement learning. These experiments demonstrate that jumpy models which incorporate temporal abstraction can facilitate planning in long-horizon tasks in which standard dynamics models fail.