 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy composition in reinforcement learning via multi-objective policy optimization
Aug 30, 2023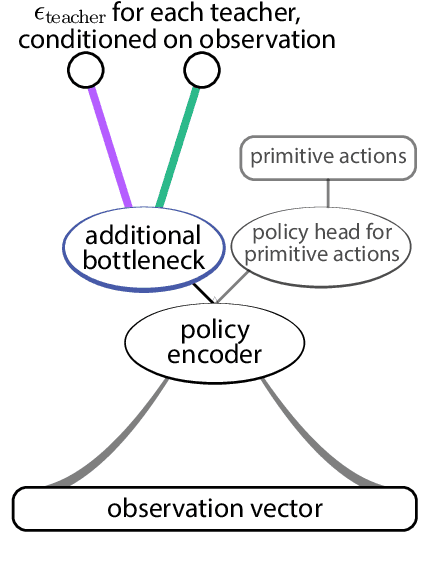
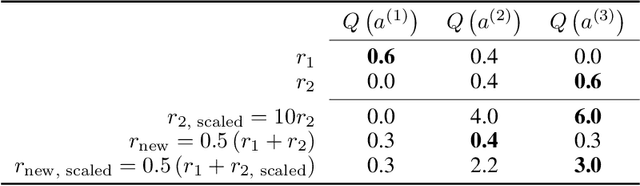
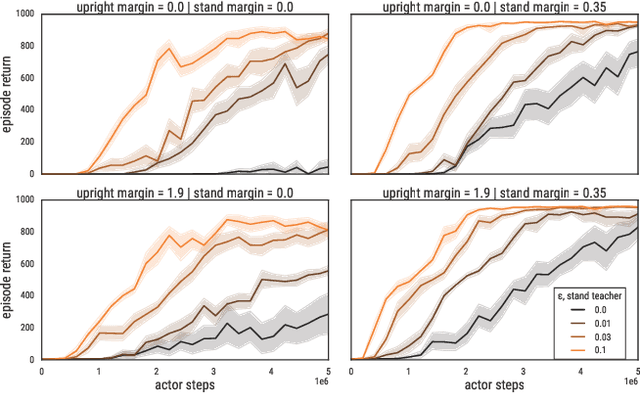
We enable reinforcement learning agents to learn successful behavior policies by utilizing relevant pre-existing teacher policies. The teacher policies are introduced as objectives, in addition to the task objective, in a multi-objective policy optimization setting. Using the Multi-Objective Maximum a Posteriori Policy Optimization algorithm (Abdolmaleki et al. 2020), we show that teacher policies can help speed up learning, particularly in the absence of shaping rewards. In two domains with continuous observation and action spaces, our agents successfully compose teacher policies in sequence and in parallel, and are also able to further extend the policies of the teachers in order to solve the task. Depending on the specified combination of task and teacher(s), teacher(s) may naturally act to limit the final performance of an agent. The extent to which agents are required to adhere to teacher policies are determined by hyperparameters which determine both the effect of teachers on learning speed and the eventual performance of the agent on the task. In the humanoid domain (Tassa et al. 2018), we also equip agents with the ability to control the selection of teachers. With this ability, agents are able to meaningfully compose from the teacher policies to achieve a superior task reward on the walk task than in cases without access to the teacher policies. We show the resemblance of composed task policies with the corresponding teacher policies through videos.
Training Compute-Optimal Large Language Models
Mar 29, 2022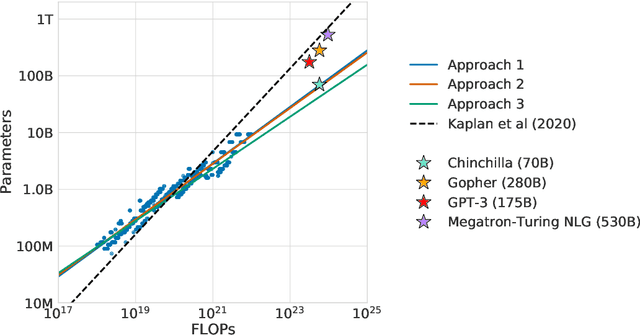
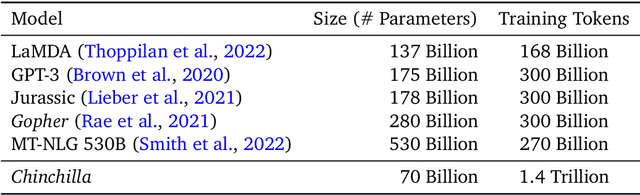
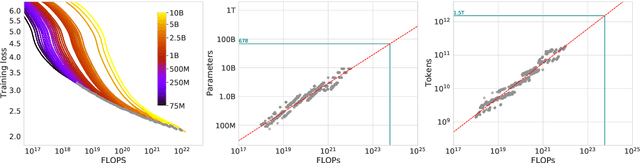

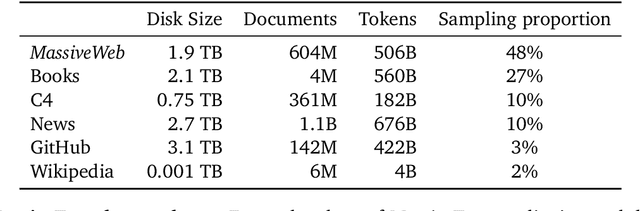
We investigate the optimal model size and number of tokens for training a transformer language model under a given compute budget. We find that current large language models are significantly undertrained, a consequence of the recent focus on scaling language models whilst keeping the amount of training data constant. By training over \nummodels language models ranging from 70 million to over 16 billion parameters on 5 to 500 billion tokens, we find that for compute-optimal training, the model size and the number of training tokens should be scaled equally: for every doubling of model size the number of training tokens should also be doubled. We test this hypothesis by training a predicted compute-optimal model, \chinchilla, that uses the same compute budget as \gopher but with 70B parameters and 4$\times$ more more data. \chinchilla uniformly and significantly outperforms \Gopher (280B), GPT-3 (175B), Jurassic-1 (178B), and Megatron-Turing NLG (530B) on a large range of downstream evaluation tasks. This also means that \chinchilla uses substantially less compute for fine-tuning and inference, greatly facilitating downstream usage. As a highlight, \chinchilla reaches a state-of-the-art average accuracy of 67.5\% on the MMLU benchmark, greater than a 7\% improvement over \gopher.
Unified Scaling Laws for Routed Language Models
Feb 09, 2022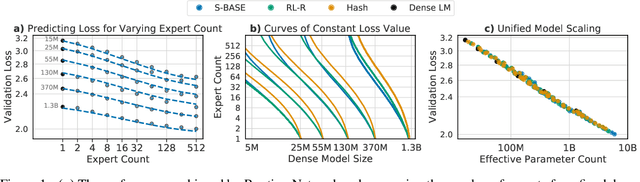

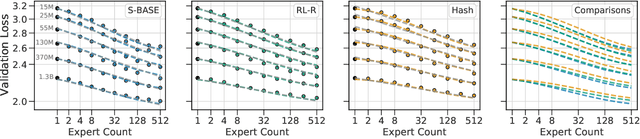
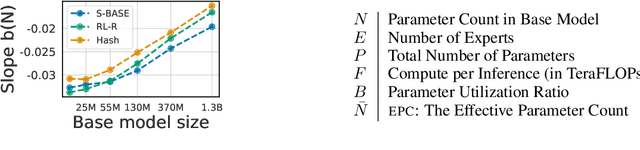
The performance of a language model has been shown to be effectively modeled as a power-law in its parameter count. Here we study the scaling behaviors of Routing Networks: architectures that conditionally use only a subset of their parameters while processing an input. For these models, parameter count and computational requirement form two independent axes along which an increase leads to better performance. In this work we derive and justify scaling laws defined on these two variables which generalize those known for standard language models and describe the performance of a wide range of routing architectures trained via three different techniques. Afterwards we provide two applications of these laws: first deriving an Effective Parameter Count along which all models scale at the same rate, and then using the scaling coefficients to give a quantitative comparison of the three routing techniques considered. Our analysis derives from an extensive evaluation of Routing Networks across five orders of magnitude of size, including models with hundreds of experts and hundreds of billions of parameters.
Improving language models by retrieving from trillions of tokens
Jan 11, 2022



We enhance auto-regressive language models by conditioning on document chunks retrieved from a large corpus, based on local similarity with preceding tokens. With a $2$ trillion token database, our Retrieval-Enhanced Transformer (RETRO) obtains comparable performance to GPT-3 and Jurassic-1 on the Pile, despite using 25$\times$ fewer parameters. After fine-tuning, RETRO performance translates to downstream knowledge-intensive tasks such as question answering. RETRO combines a frozen Bert retriever, a differentiable encoder and a chunked cross-attention mechanism to predict tokens based on an order of magnitude more data than what is typically consumed during training. We typically train RETRO from scratch, yet can also rapidly RETROfit pre-trained transformers with retrieval and still achieve good performance. Our work opens up new avenues for improving language models through explicit memory at unprecedented scale.
Scaling Language Models: Methods, Analysis & Insights from Training Gopher
Dec 08, 2021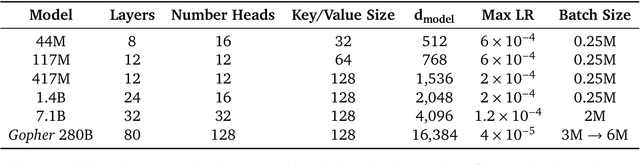
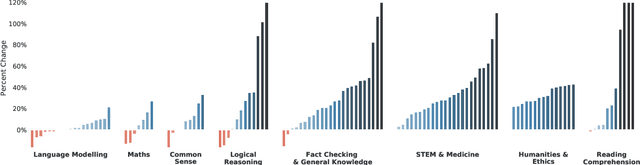
Language modelling provides a step towards intelligent communication systems by harnessing large repositories of written human knowledge to better predict and understand the world. In this paper, we present an analysis of Transformer-based language model performance across a wide range of model scales -- from models with tens of millions of parameters up to a 280 billion parameter model called Gopher. These models are evaluated on 152 diverse tasks, achieving state-of-the-art performance across the majority. Gains from scale are largest in areas such as reading comprehension, fact-checking, and the identification of toxic language, but logical and mathematical reasoning see less benefit. We provide a holistic analysis of the training dataset and model's behaviour, covering the intersection of model scale with bias and toxicity. Finally we discuss the application of language models to AI safety and the mitigation of downstream harms.
AlgebraNets
Jun 16, 2020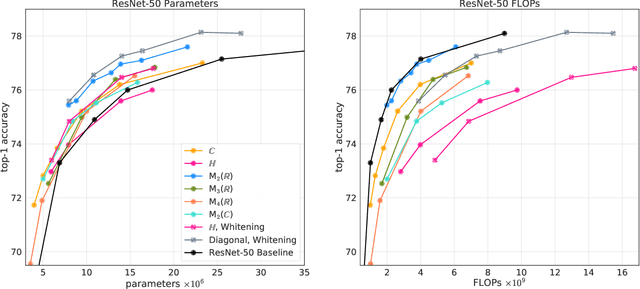
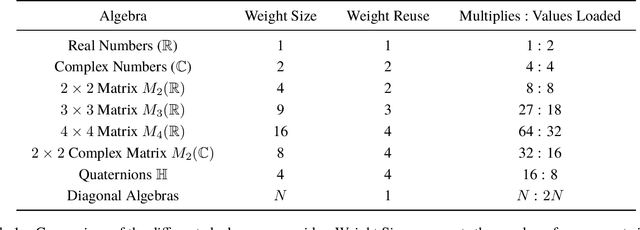
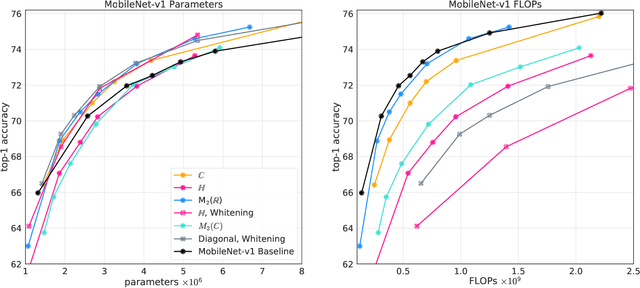

Neural networks have historically been built layerwise from the set of functions in ${f: \mathbb{R}^n \to \mathbb{R}^m }$, i.e. with activations and weights/parameters represented by real numbers, $\mathbb{R}$. Our work considers a richer set of objects for activations and weights, and undertakes a comprehensive study of alternative algebras as number representations by studying their performance on two challenging problems: large-scale image classification using the ImageNet dataset and language modeling using the enwiki8 and WikiText-103 datasets. We denote this broader class of models as AlgebraNets. Our findings indicate that the conclusions of prior work, which explored neural networks constructed from $\mathbb{C}$ (complex numbers) and $\mathbb{H}$ (quaternions) on smaller datasets, do not always transfer to these challenging settings. However, our results demonstrate that there are alternative algebras which deliver better parameter and computational efficiency compared with $\mathbb{R}$. We consider $\mathbb{C}$, $\mathbb{H}$, $M_{2}(\mathbb{R})$ (the set of $2\times2$ real-valued matrices), $M_{2}(\mathbb{C})$, $M_{3}(\mathbb{R})$ and $M_{4}(\mathbb{R})$. Additionally, we note that multiplication in these algebras has higher compute density than real multiplication, a useful property in situations with inherently limited parameter reuse such as auto-regressive inference and sparse neural networks. We therefore investigate how to induce sparsity within AlgebraNets. We hope that our strong results on large-scale, practical benchmarks will spur further exploration of these unconventional architectures which challenge the default choice of using real numbers for neural network weights and activations.
Recurrent Independent Mechanisms
Sep 26, 2019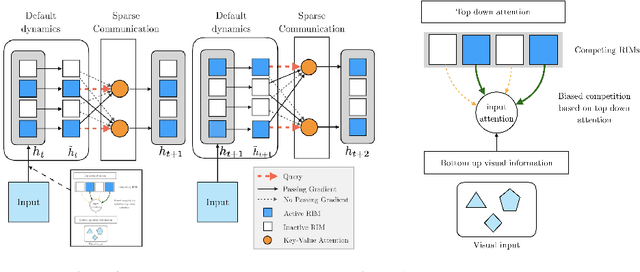
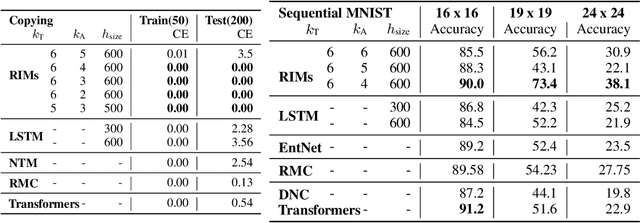
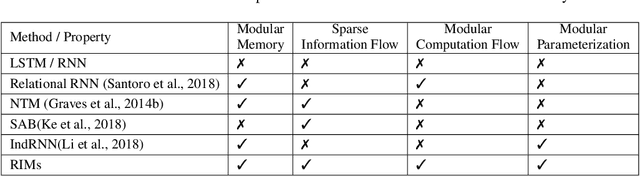

Learning modular structures which reflect the dynamics of the environment can lead to better generalization and robustness to changes which only affect a few of the underlying causes. We propose Recurrent Independent Mechanisms (RIMs), a new recurrent architecture in which multiple groups of recurrent cells operate with nearly independent transition dynamics, communicate only sparingly through the bottleneck of attention, and are only updated at time steps where they are most relevant. We show that this leads to specialization amongst the RIMs, which in turn allows for dramatically improved generalization on tasks where some factors of variation differ systematically between training and evaluation.
Data-Driven Approach to Encoding and Decoding 3-D Crystal Structures
Sep 03, 2019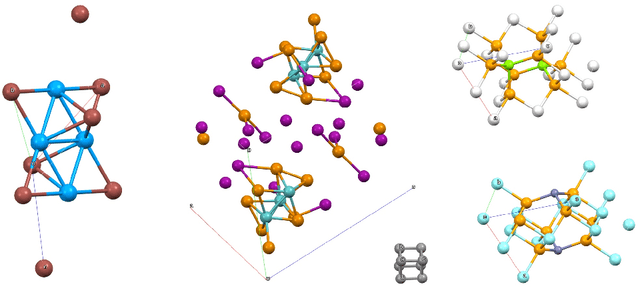
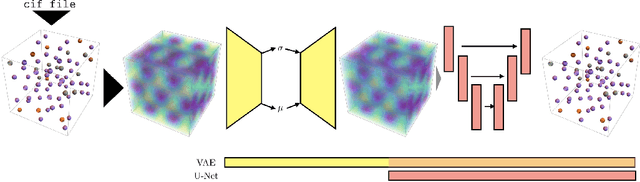
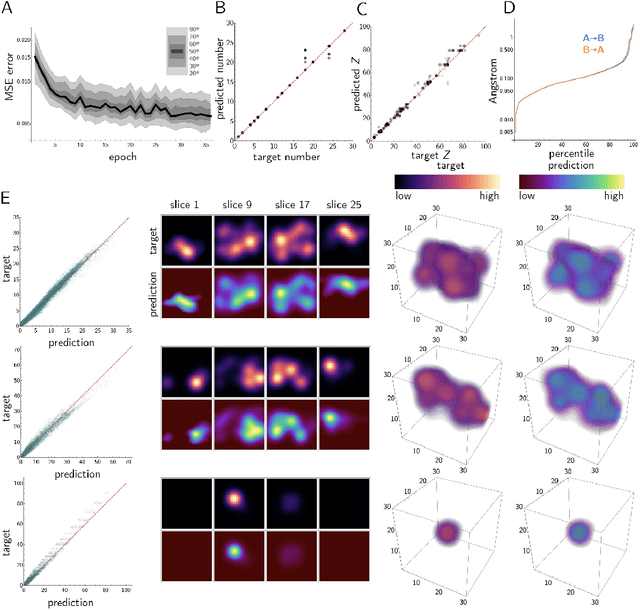
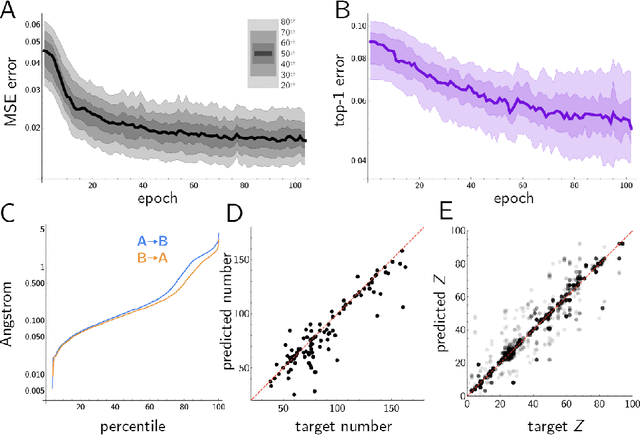
Generative models have achieved impressive results in many domains including image and text generation. In the natural sciences, generative models have led to rapid progress in automated drug discovery. Many of the current methods focus on either 1-D or 2-D representations of typically small, drug-like molecules. However, many molecules require 3-D descriptors and exceed the chemical complexity of commonly used dataset. We present a method to encode and decode the position of atoms in 3-D molecules from a dataset of nearly 50,000 stable crystal unit cells that vary from containing 1 to over 100 atoms. We construct a smooth and continuous 3-D density representation of each crystal based on the positions of different atoms. Two different neural networks were trained on a dataset of over 120,000 three-dimensional samples of single and repeating crystal structures, made by rotating the single unit cells. The first, an Encoder-Decoder pair, constructs a compressed latent space representation of each molecule and then decodes this description into an accurate reconstruction of the input. The second network segments the resulting output into atoms and assigns each atom an atomic number. By generating compressed, continuous latent spaces representations of molecules we are able to decode random samples, interpolate between two molecules, and alter known molecules.
InfoGraph: Unsupervised and Semi-supervised Graph-Level Representation Learning via Mutual Information Maximization
Jul 31, 2019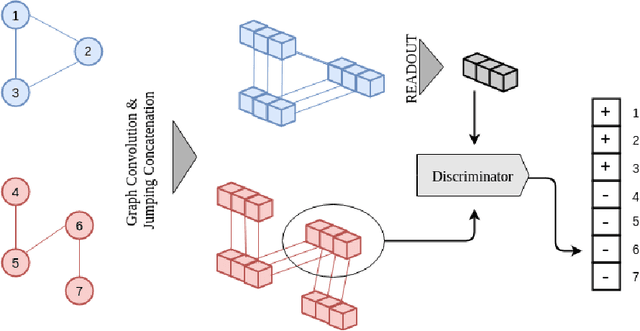
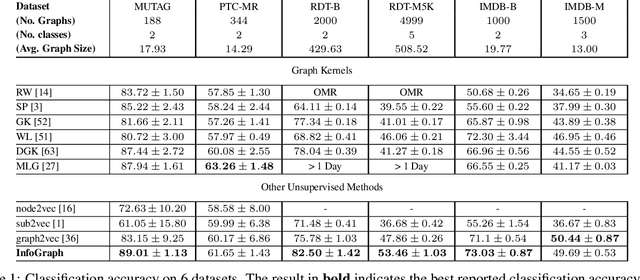


This paper studies learning the representations of whole graphs in both unsupervised and semi-supervised scenarios. Graph-level representations are critical in a variety of real-world applications such as predicting the properties of molecules and community analysis in social networks. Traditional graph kernel based methods are simple, yet effective for obtaining fixed-length representations for graphs but they suffer from poor generalization due to hand-crafted designs. There are also some recent methods based on language models (e.g. graph2vec) but they tend to only consider certain substructures (e.g. subtrees) as graph representatives. Inspired by recent progress of unsupervised representation learning, in this paper we proposed a novel method called InfoGraph for learning graph-level representations. We maximize the mutual information between the graph-level representation and the representations of substructures of different scales (e.g., nodes, edges, triangles). By doing so, the graph-level representations encode aspects of the data that are shared across different scales of substructures. Furthermore, we further propose InfoGraph*, an extension of InfoGraph for semi-supervised scenarios. InfoGraph* maximizes the mutual information between unsupervised graph representations learned by InfoGraph and the representations learned by existing supervised methods. As a result, the supervised encoder learns from unlabeled data while preserving the latent semantic space favored by the current supervised task. Experimental results on the tasks of graph classification and molecular property prediction show that InfoGraph is superior to state-of-the-art baselines and InfoGraph* can achieve performance competitive with state-of-the-art semi-supervised models.
vGraph: A Generative Model for Joint Community Detection and Node Representation Learning
Jun 18, 2019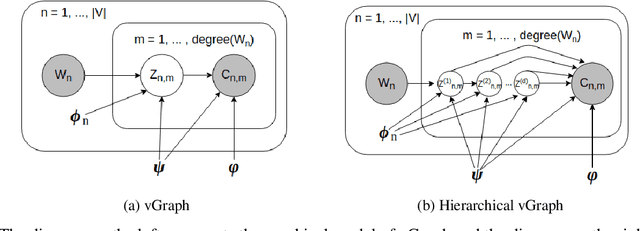
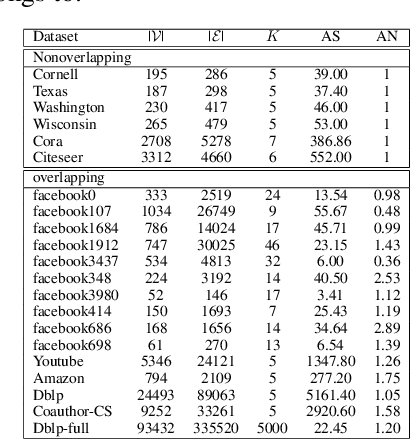
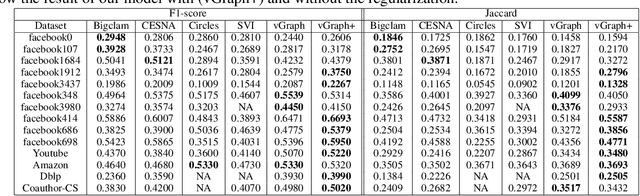

This paper focuses on two fundamental tasks of graph analysis: community detection and node representation learning, which capture the global and local structures of graphs, respectively. In the current literature, these two tasks are usually independently studied while they are actually highly correlated. We propose a probabilistic generative model called vGraph to learn community membership and node representation collaboratively. Specifically, we assume that each node can be represented as a mixture of communities, and each community is defined as a multinomial distribution over nodes. Both the mixing coefficients and the community distribution are parameterized by the low-dimensional representations of the nodes and communities. We designed an effective variational inference algorithm which regularizes the community membership of neighboring nodes to be similar in the latent space. Experimental results on multiple real-world graphs show that vGraph is very effective in both community detection and node representation learning, outperforming many competitive baselines in both tasks. We show that the framework of vGraph is quite flexible and can be easily extended to detect hierarchical communities.