 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProc4Gem: Foundation models for physical agency through procedural generation
Mar 11, 2025



In robot learning, it is common to either ignore the environment semantics, focusing on tasks like whole-body control which only require reasoning about robot-environment contacts, or conversely to ignore contact dynamics, focusing on grounding high-level movement in vision and language. In this work, we show that advances in generative modeling, photorealistic rendering, and procedural generation allow us to tackle tasks requiring both. By generating contact-rich trajectories with accurate physics in semantically-diverse simulations, we can distill behaviors into large multimodal models that directly transfer to the real world: a system we call Proc4Gem. Specifically, we show that a foundation model, Gemini, fine-tuned on only simulation data, can be instructed in language to control a quadruped robot to push an object with its body to unseen targets in unseen real-world environments. Our real-world results demonstrate the promise of using simulation to imbue foundation models with physical agency. Videos can be found at our website: https://sites.google.com/view/proc4gem
Mastering Stacking of Diverse Shapes with Large-Scale Iterative Reinforcement Learning on Real Robots
Dec 18, 2023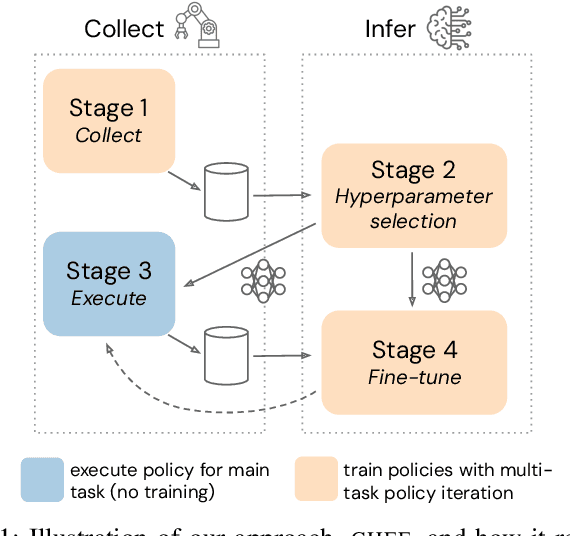
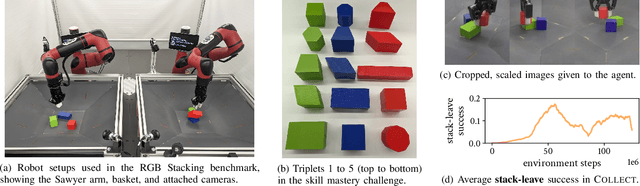

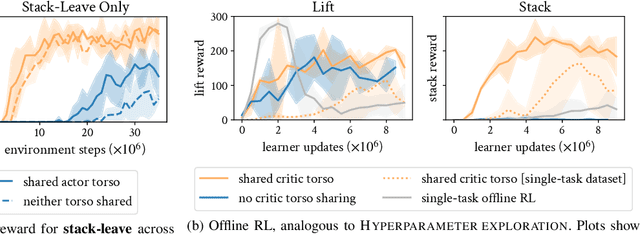
Reinforcement learning solely from an agent's self-generated data is often believed to be infeasible for learning on real robots, due to the amount of data needed. However, if done right, agents learning from real data can be surprisingly efficient through re-using previously collected sub-optimal data. In this paper we demonstrate how the increased understanding of off-policy learning methods and their embedding in an iterative online/offline scheme (``collect and infer'') can drastically improve data-efficiency by using all the collected experience, which empowers learning from real robot experience only. Moreover, the resulting policy improves significantly over the state of the art on a recently proposed real robot manipulation benchmark. Our approach learns end-to-end, directly from pixels, and does not rely on additional human domain knowledge such as a simulator or demonstrations.
Coherent Soft Imitation Learning
May 29, 2023Imitation learning methods seek to learn from an expert either through behavioral cloning (BC) of the policy or inverse reinforcement learning (IRL) of the reward. Such methods enable agents to learn complex tasks from humans that are difficult to capture with hand-designed reward functions. Choosing BC or IRL for imitation depends on the quality and state-action coverage of the demonstrations, as well as additional access to the Markov decision process. Hybrid strategies that combine BC and IRL are not common, as initial policy optimization against inaccurate rewards diminishes the benefit of pretraining the policy with BC. This work derives an imitation method that captures the strengths of both BC and IRL. In the entropy-regularized ('soft') reinforcement learning setting, we show that the behaviour-cloned policy can be used as both a shaped reward and a critic hypothesis space by inverting the regularized policy update. This coherency facilities fine-tuning cloned policies using the reward estimate and additional interactions with the environment. This approach conveniently achieves imitation learning through initial behaviour cloning, followed by refinement via RL with online or offline data sources. The simplicity of the approach enables graceful scaling to high-dimensional and vision-based tasks, with stable learning and minimal hyperparameter tuning, in contrast to adversarial approaches.
Learning Agile Soccer Skills for a Bipedal Robot with Deep Reinforcement Learning
Apr 26, 2023We investigate whether Deep Reinforcement Learning (Deep RL) is able to synthesize sophisticated and safe movement skills for a low-cost, miniature humanoid robot that can be composed into complex behavioral strategies in dynamic environments. We used Deep RL to train a humanoid robot with 20 actuated joints to play a simplified one-versus-one (1v1) soccer game. We first trained individual skills in isolation and then composed those skills end-to-end in a self-play setting. The resulting policy exhibits robust and dynamic movement skills such as rapid fall recovery, walking, turning, kicking and more; and transitions between them in a smooth, stable, and efficient manner - well beyond what is intuitively expected from the robot. The agents also developed a basic strategic understanding of the game, and learned, for instance, to anticipate ball movements and to block opponent shots. The full range of behaviors emerged from a small set of simple rewards. Our agents were trained in simulation and transferred to real robots zero-shot. We found that a combination of sufficiently high-frequency control, targeted dynamics randomization, and perturbations during training in simulation enabled good-quality transfer, despite significant unmodeled effects and variations across robot instances. Although the robots are inherently fragile, minor hardware modifications together with basic regularization of the behavior during training led the robots to learn safe and effective movements while still performing in a dynamic and agile way. Indeed, even though the agents were optimized for scoring, in experiments they walked 156% faster, took 63% less time to get up, and kicked 24% faster than a scripted baseline, while efficiently combining the skills to achieve the longer term objectives. Examples of the emergent behaviors and full 1v1 matches are available on the supplementary website.
On Multi-objective Policy Optimization as a Tool for Reinforcement Learning
Jun 15, 2021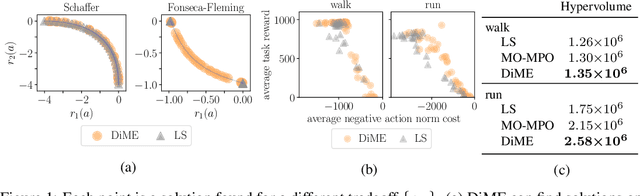
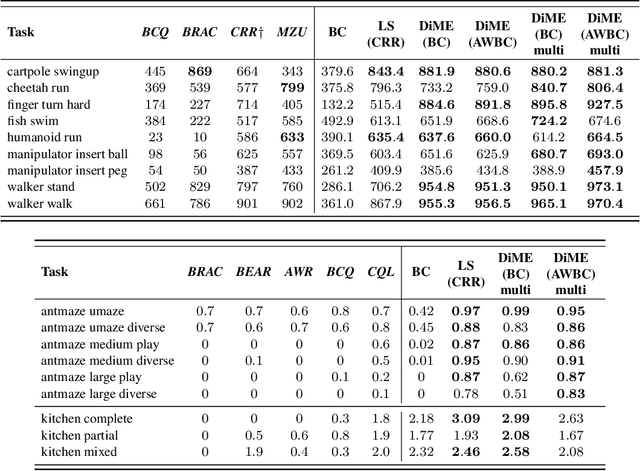
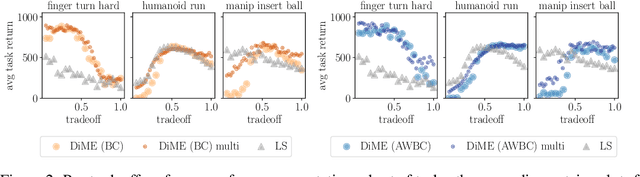
Many advances that have improved the robustness and efficiency of deep reinforcement learning (RL) algorithms can, in one way or another, be understood as introducing additional objectives, or constraints, in the policy optimization step. This includes ideas as far ranging as exploration bonuses, entropy regularization, and regularization toward teachers or data priors when learning from experts or in offline RL. Often, task reward and auxiliary objectives are in conflict with each other and it is therefore natural to treat these examples as instances of multi-objective (MO) optimization problems. We study the principles underlying MORL and introduce a new algorithm, Distillation of a Mixture of Experts (DiME), that is intuitive and scale-invariant under some conditions. We highlight its strengths on standard MO benchmark problems and consider case studies in which we recast offline RL and learning from experts as MO problems. This leads to a natural algorithmic formulation that sheds light on the connection between existing approaches. For offline RL, we use the MO perspective to derive a simple algorithm, that optimizes for the standard RL objective plus a behavioral cloning term. This outperforms state-of-the-art on two established offline RL benchmarks.
A Distributional View on Multi-Objective Policy Optimization
May 15, 2020
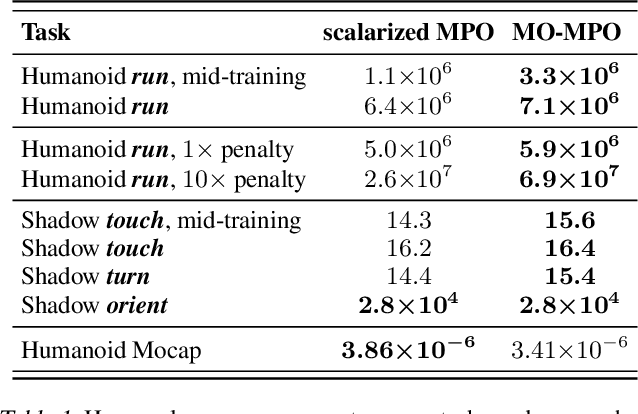
Many real-world problems require trading off multiple competing objectives. However, these objectives are often in different units and/or scales, which can make it challenging for practitioners to express numerical preferences over objectives in their native units. In this paper we propose a novel algorithm for multi-objective reinforcement learning that enables setting desired preferences for objectives in a scale-invariant way. We propose to learn an action distribution for each objective, and we use supervised learning to fit a parametric policy to a combination of these distributions. We demonstrate the effectiveness of our approach on challenging high-dimensional real and simulated robotics tasks, and show that setting different preferences in our framework allows us to trace out the space of nondominated solutions.
Nonverbal Robot Feedback for Human Teachers
Nov 06, 2019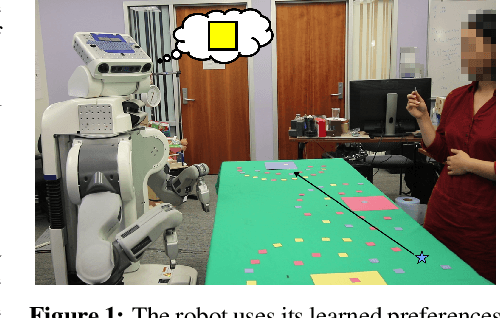
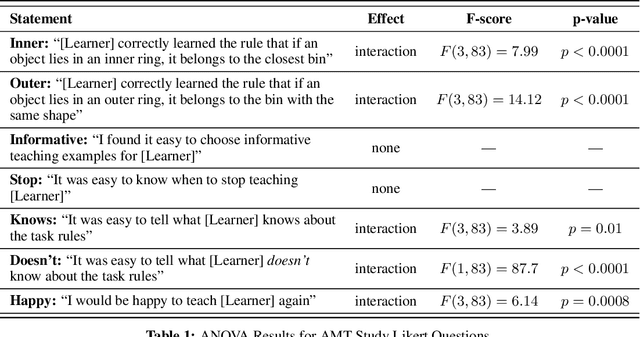
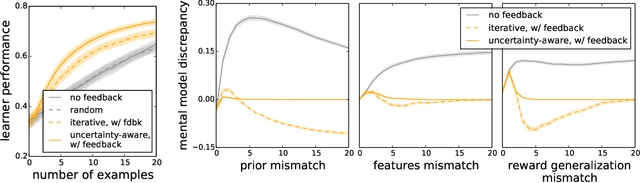
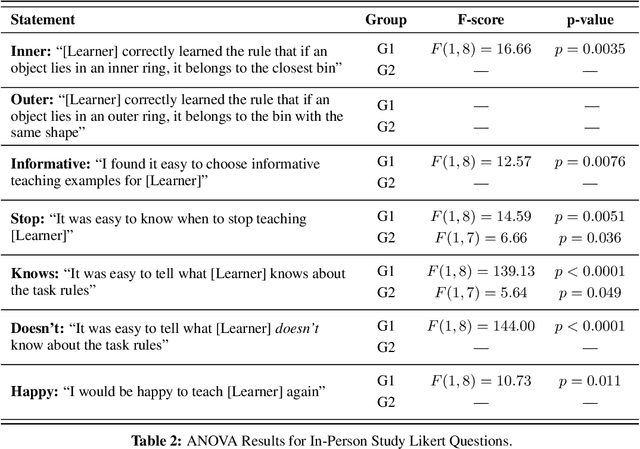
Robots can learn preferences from human demonstrations, but their success depends on how informative these demonstrations are. Being informative is unfortunately very challenging, because during teaching, people typically get no transparency into what the robot already knows or has learned so far. In contrast, human students naturally provide a wealth of nonverbal feedback that reveals their level of understanding and engagement. In this work, we study how a robot can similarly provide feedback that is minimally disruptive, yet gives human teachers a better mental model of the robot learner, and thus enables them to teach more effectively. Our idea is that at any point, the robot can indicate what it thinks the correct next action is, shedding light on its current estimate of the human's preferences. We analyze how useful this feedback is, both in theory and with two user studies---one with a virtual character that tests the feedback itself, and one with a PR2 robot that uses gaze as the feedback mechanism. We find that feedback can be useful for improving both the quality of teaching and teachers' understanding of the robot's capability.
Learning Gentle Object Manipulation with Curiosity-Driven Deep Reinforcement Learning
Mar 20, 2019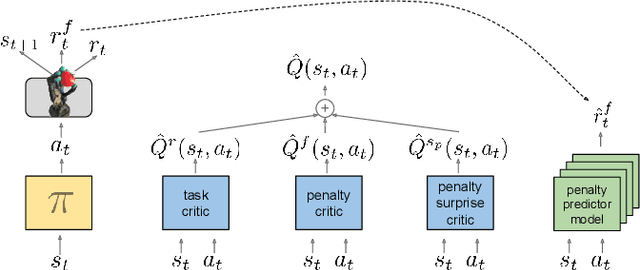
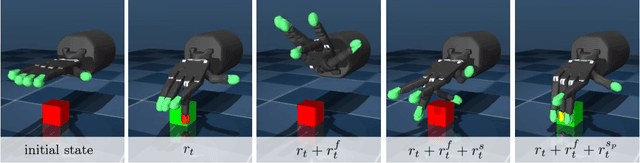
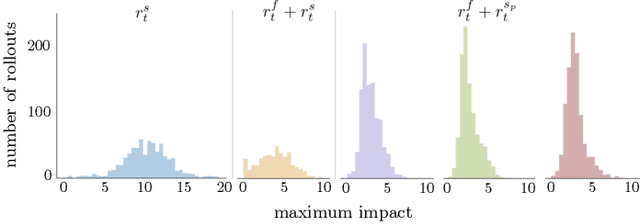

Robots must know how to be gentle when they need to interact with fragile objects, or when the robot itself is prone to wear and tear. We propose an approach that enables deep reinforcement learning to train policies that are gentle, both during exploration and task execution. In a reward-based learning environment, a natural approach involves augmenting the (task) reward with a penalty for non-gentleness, which can be defined as excessive impact force. However, augmenting with only this penalty impairs learning: policies get stuck in a local optimum which avoids all contact with the environment. Prior research has shown that combining auxiliary tasks or intrinsic rewards can be beneficial for stabilizing and accelerating learning in sparse-reward domains, and indeed we find that introducing a surprise-based intrinsic reward does avoid the no-contact failure case. However, we show that a simple dynamics-based surprise is not as effective as penalty-based surprise. Penalty-based surprise, based on predicting forceful contacts, has a further benefit: it encourages exploration which is contact-rich yet gentle. We demonstrate the effectiveness of the approach using a complex, tendon-powered robot hand with tactile sensors. Videos are available at http://sites.google.com/view/gentlemanipulation.
Human-AI Learning Performance in Multi-Armed Bandits
Dec 21, 2018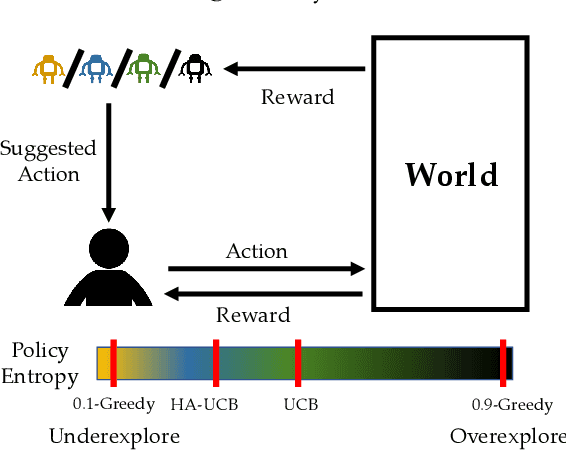
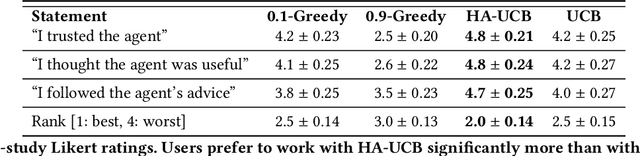
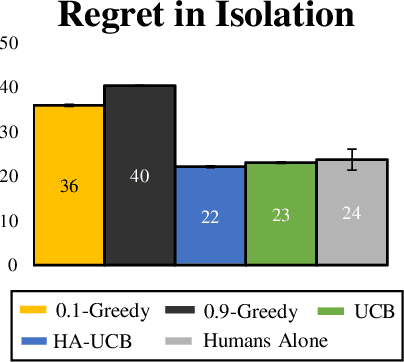
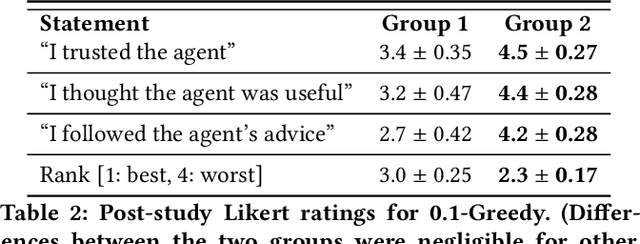
People frequently face challenging decision-making problems in which outcomes are uncertain or unknown. Artificial intelligence (AI) algorithms exist that can outperform humans at learning such tasks. Thus, there is an opportunity for AI agents to assist people in learning these tasks more effectively. In this work, we use a multi-armed bandit as a controlled setting in which to explore this direction. We pair humans with a selection of agents and observe how well each human-agent team performs. We find that team performance can beat both human and agent performance in isolation. Interestingly, we also find that an agent's performance in isolation does not necessarily correlate with the human-agent team's performance. A drop in agent performance can lead to a disproportionately large drop in team performance, or in some settings can even improve team performance. Pairing a human with an agent that performs slightly better than them can make them perform much better, while pairing them with an agent that performs the same can make them them perform much worse. Further, our results suggest that people have different exploration strategies and might perform better with agents that match their strategy. Overall, optimizing human-agent team performance requires going beyond optimizing agent performance, to understanding how the agent's suggestions will influence human decision-making.
Enabling Robots to Communicate their Objectives
Oct 18, 2018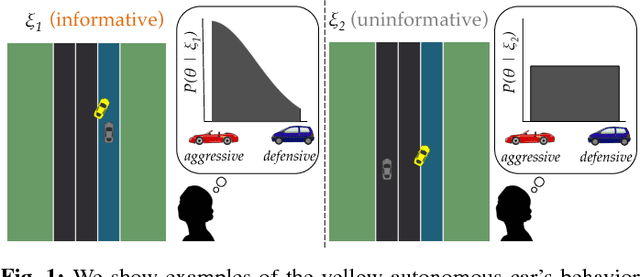
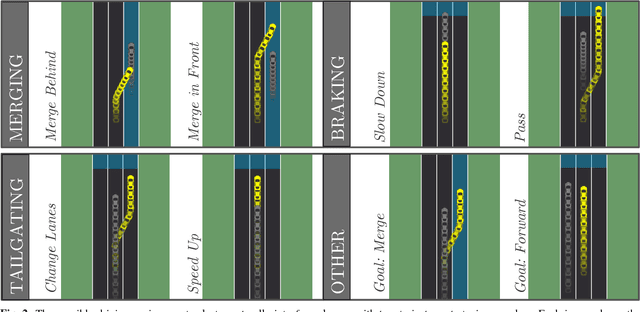
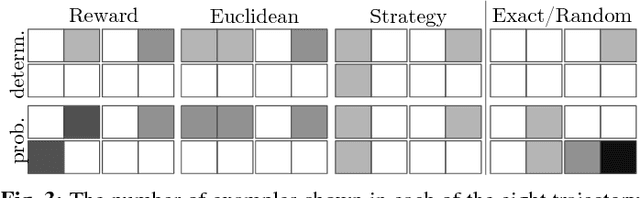
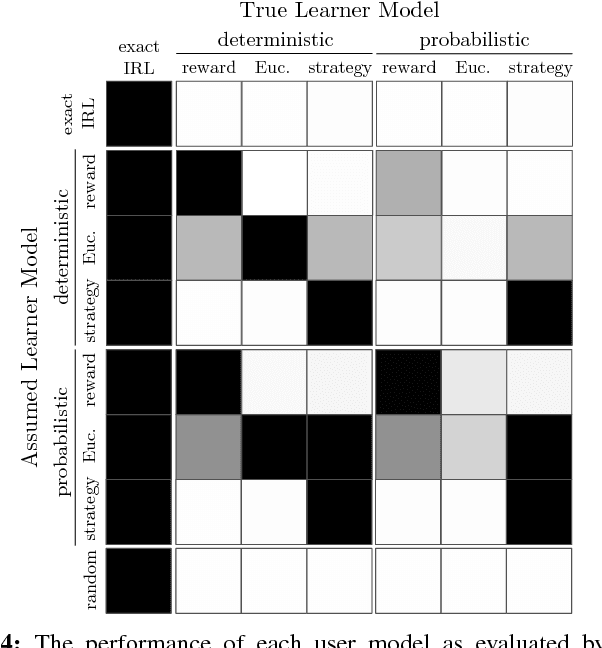
The overarching goal of this work is to efficiently enable end-users to correctly anticipate a robot's behavior in novel situations. Since a robot's behavior is often a direct result of its underlying objective function, our insight is that end-users need to have an accurate mental model of this objective function in order to understand and predict what the robot will do. While people naturally develop such a mental model over time through observing the robot act, this familiarization process may be lengthy. Our approach reduces this time by having the robot model how people infer objectives from observed behavior, and then it selects those behaviors that are maximally informative. The problem of computing a posterior over objectives from observed behavior is known as Inverse Reinforcement Learning (IRL), and has been applied to robots learning human objectives. We consider the problem where the roles of human and robot are swapped. Our main contribution is to recognize that unlike robots, humans will not be exact in their IRL inference. We thus introduce two factors to define candidate approximate-inference models for human learning in this setting, and analyze them in a user study in the autonomous driving domain. We show that certain approximate-inference models lead to the robot generating example behaviors that better enable users to anticipate what it will do in novel situations. Our results also suggest, however, that additional research is needed in modeling how humans extrapolate from examples of robot behavior.