 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Multi-objective Policy Optimization as a Tool for Reinforcement Learning
Jun 15, 2021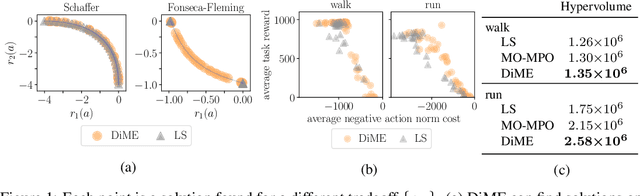
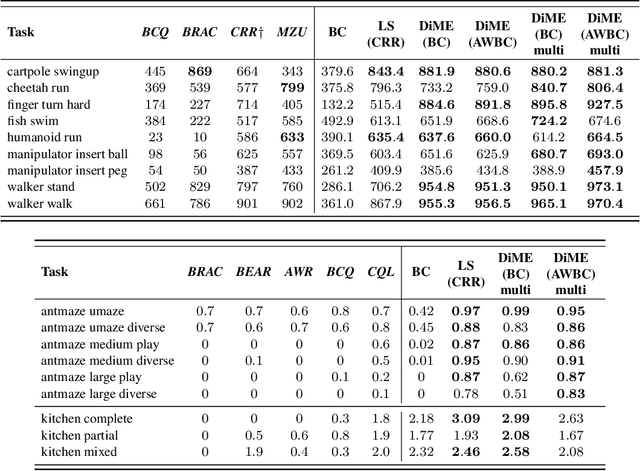
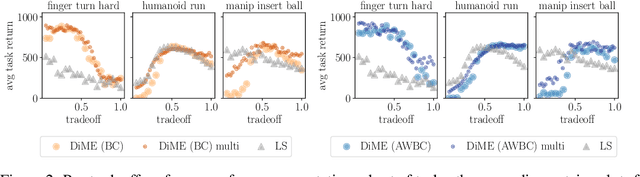
Many advances that have improved the robustness and efficiency of deep reinforcement learning (RL) algorithms can, in one way or another, be understood as introducing additional objectives, or constraints, in the policy optimization step. This includes ideas as far ranging as exploration bonuses, entropy regularization, and regularization toward teachers or data priors when learning from experts or in offline RL. Often, task reward and auxiliary objectives are in conflict with each other and it is therefore natural to treat these examples as instances of multi-objective (MO) optimization problems. We study the principles underlying MORL and introduce a new algorithm, Distillation of a Mixture of Experts (DiME), that is intuitive and scale-invariant under some conditions. We highlight its strengths on standard MO benchmark problems and consider case studies in which we recast offline RL and learning from experts as MO problems. This leads to a natural algorithmic formulation that sheds light on the connection between existing approaches. For offline RL, we use the MO perspective to derive a simple algorithm, that optimizes for the standard RL objective plus a behavioral cloning term. This outperforms state-of-the-art on two established offline RL benchmarks.
Distributed Distributional Deterministic Policy Gradients
Apr 23, 2018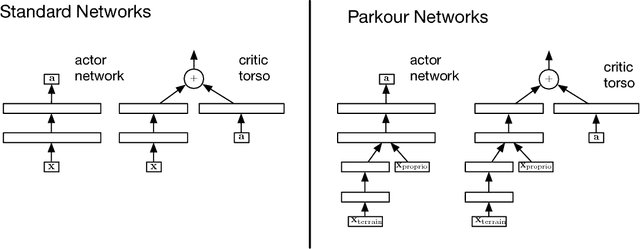
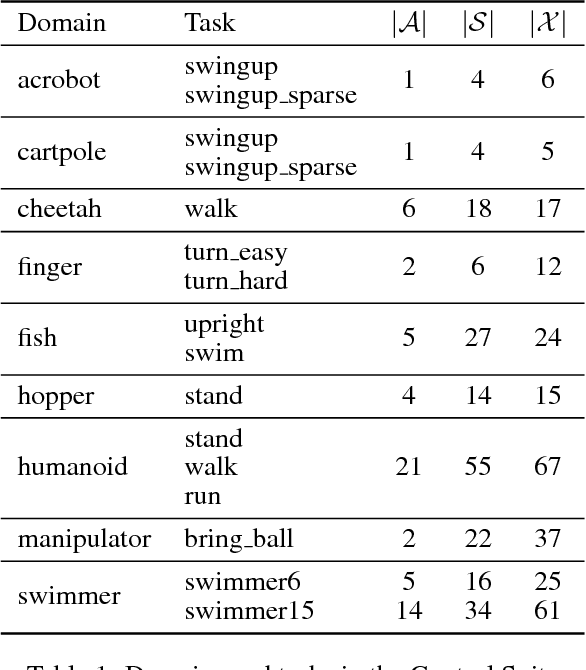
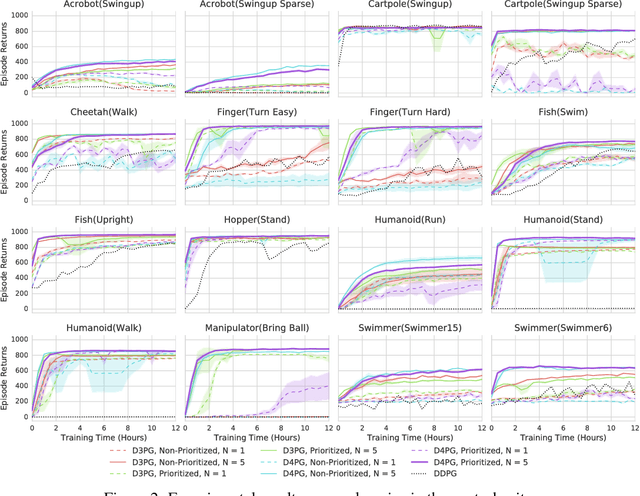
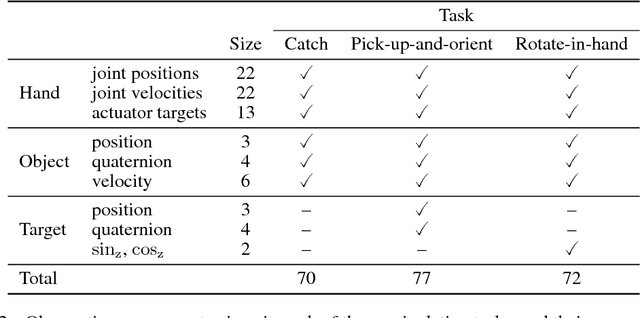
This work adopts the very successful distributional perspective on reinforcement learning and adapts it to the continuous control setting. We combine this within a distributed framework for off-policy learning in order to develop what we call the Distributed Distributional Deep Deterministic Policy Gradient algorithm, D4PG. We also combine this technique with a number of additional, simple improvements such as the use of $N$-step returns and prioritized experience replay. Experimentally we examine the contribution of each of these individual components, and show how they interact, as well as their combined contributions. Our results show that across a wide variety of simple control tasks, difficult manipulation tasks, and a set of hard obstacle-based locomotion tasks the D4PG algorithm achieves state of the art performance.
Probing Physics Knowledge Using Tools from Developmental Psychology
Apr 03, 2018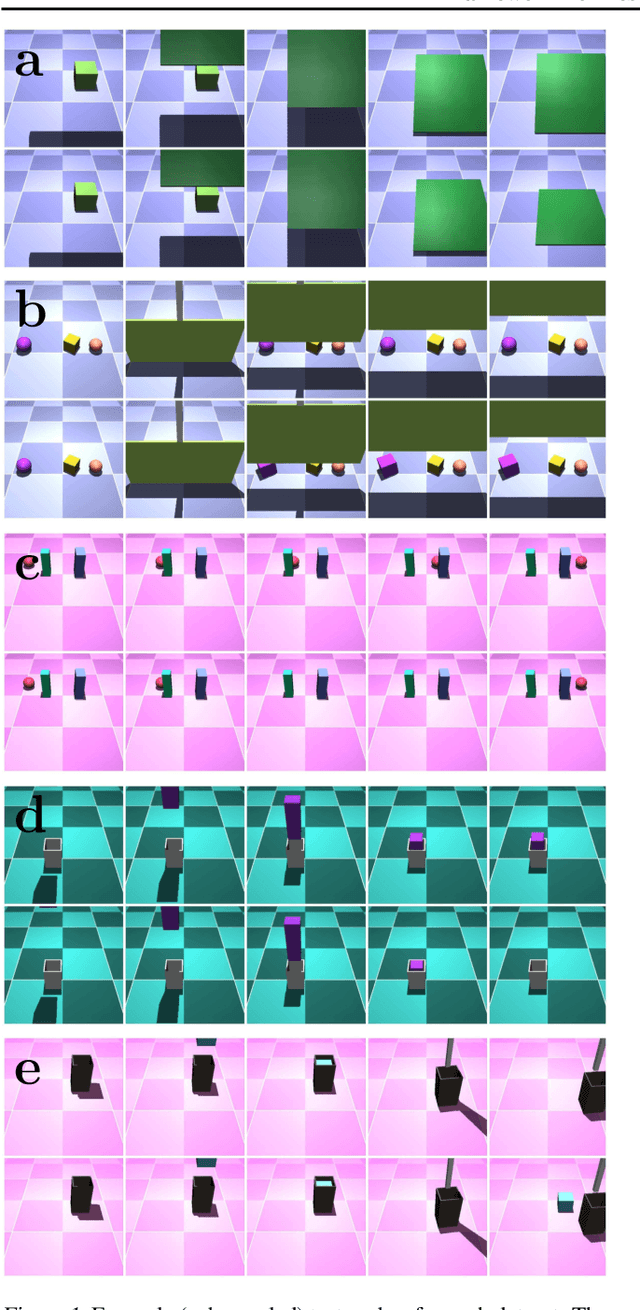
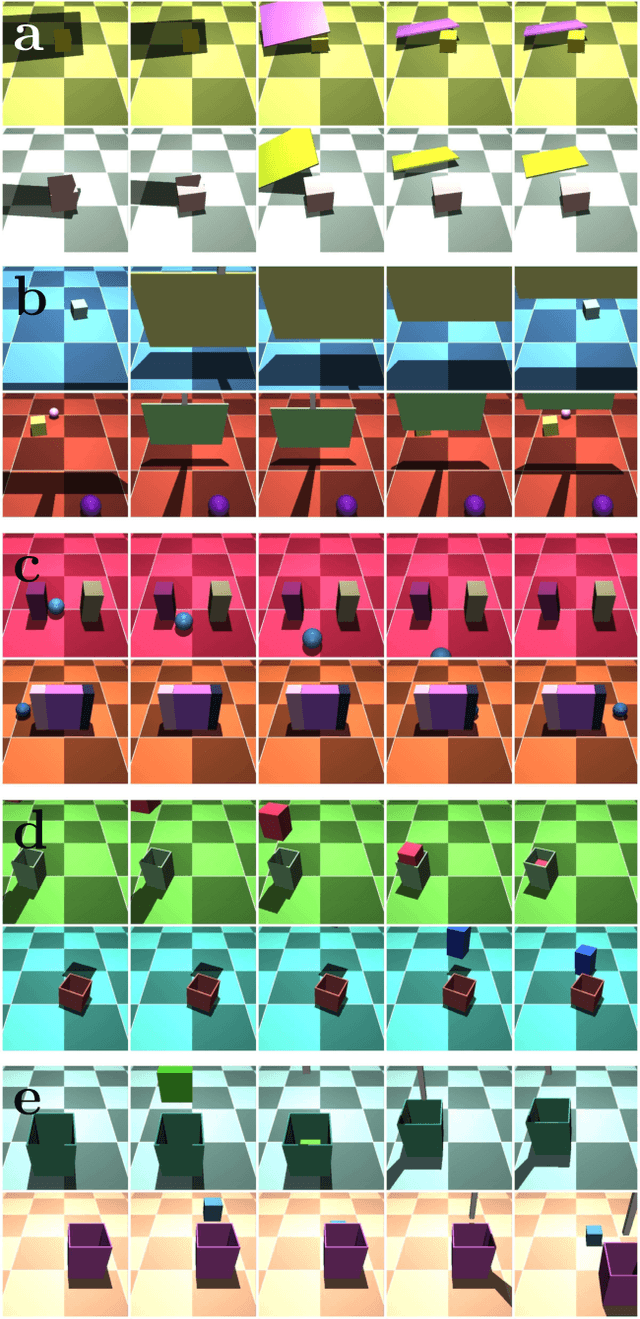
In order to build agents with a rich understanding of their environment, one key objective is to endow them with a grasp of intuitive physics; an ability to reason about three-dimensional objects, their dynamic interactions, and responses to forces. While some work on this problem has taken the approach of building in components such as ready-made physics engines, other research aims to extract general physical concepts directly from sensory data. In the latter case, one challenge that arises is evaluating the learning system. Research on intuitive physics knowledge in children has long employed a violation of expectations (VOE) method to assess children's mastery of specific physical concepts. We take the novel step of applying this method to artificial learning systems. In addition to introducing the VOE technique, we describe a set of probe datasets inspired by classic test stimuli from developmental psychology. We test a baseline deep learning system on this battery, as well as on a physics learning dataset ("IntPhys") recently posed by another research group. Our results show how the VOE technique may provide a useful tool for tracking physics knowledge in future research.
Emergence of Locomotion Behaviours in Rich Environments
Jul 10, 2017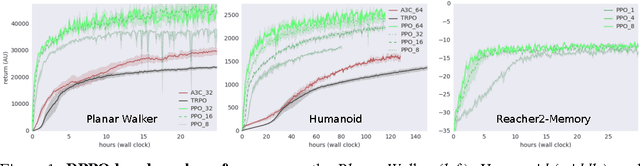
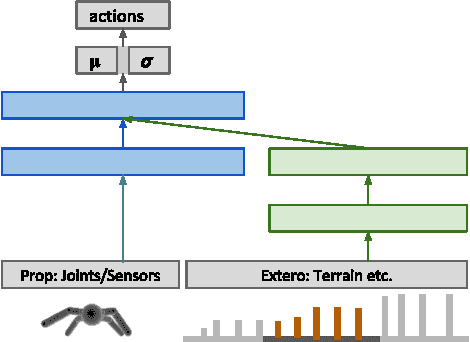
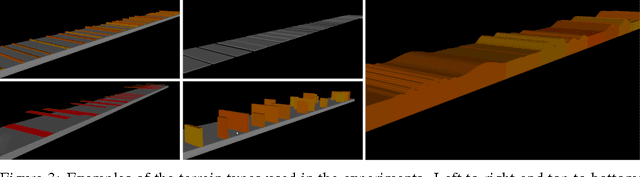

The reinforcement learning paradigm allows, in principle, for complex behaviours to be learned directly from simple reward signals. In practice, however, it is common to carefully hand-design the reward function to encourage a particular solution, or to derive it from demonstration data. In this paper explore how a rich environment can help to promote the learning of complex behavior. Specifically, we train agents in diverse environmental contexts, and find that this encourages the emergence of robust behaviours that perform well across a suite of tasks. We demonstrate this principle for locomotion -- behaviours that are known for their sensitivity to the choice of reward. We train several simulated bodies on a diverse set of challenging terrains and obstacles, using a simple reward function based on forward progress. Using a novel scalable variant of policy gradient reinforcement learning, our agents learn to run, jump, crouch and turn as required by the environment without explicit reward-based guidance. A visual depiction of highlights of the learned behavior can be viewed following https://youtu.be/hx_bgoTF7bs .
Learning human behaviors from motion capture by adversarial imitation
Jul 10, 2017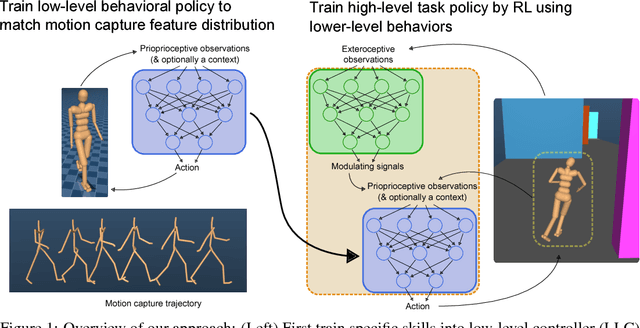
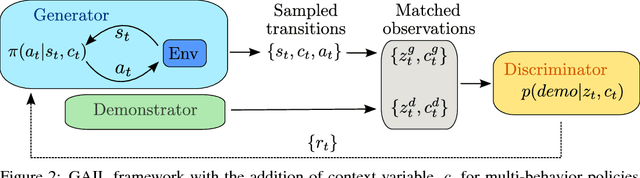
Rapid progress in deep reinforcement learning has made it increasingly feasible to train controllers for high-dimensional humanoid bodies. However, methods that use pure reinforcement learning with simple reward functions tend to produce non-humanlike and overly stereotyped movement behaviors. In this work, we extend generative adversarial imitation learning to enable training of generic neural network policies to produce humanlike movement patterns from limited demonstrations consisting only of partially observed state features, without access to actions, even when the demonstrations come from a body with different and unknown physical parameters. We leverage this approach to build sub-skill policies from motion capture data and show that they can be reused to solve tasks when controlled by a higher level controller.