 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecurrentGemma: Moving Past Transformers for Efficient Open Language Models
Apr 11, 2024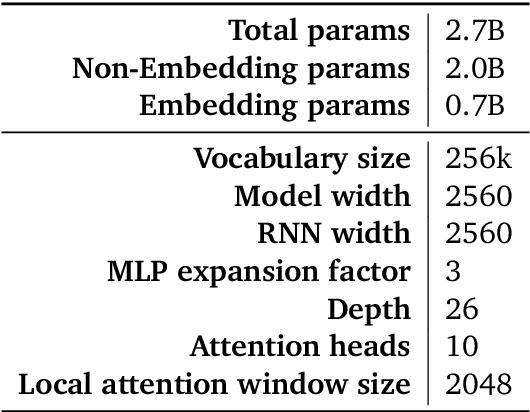
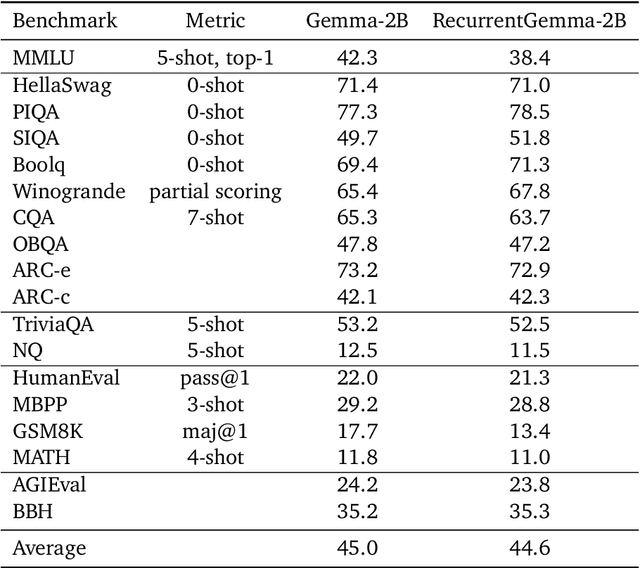
We introduce RecurrentGemma, an open language model which uses Google's novel Griffin architecture. Griffin combines linear recurrences with local attention to achieve excellent performance on language. It has a fixed-sized state, which reduces memory use and enables efficient inference on long sequences. We provide a pre-trained model with 2B non-embedding parameters, and an instruction tuned variant. Both models achieve comparable performance to Gemma-2B despite being trained on fewer tokens.
Griffin: Mixing Gated Linear Recurrences with Local Attention for Efficient Language Models
Feb 29, 2024Recurrent neural networks (RNNs) have fast inference and scale efficiently on long sequences, but they are difficult to train and hard to scale. We propose Hawk, an RNN with gated linear recurrences, and Griffin, a hybrid model that mixes gated linear recurrences with local attention. Hawk exceeds the reported performance of Mamba on downstream tasks, while Griffin matches the performance of Llama-2 despite being trained on over 6 times fewer tokens. We also show that Griffin can extrapolate on sequences significantly longer than those seen during training. Our models match the hardware efficiency of Transformers during training, and during inference they have lower latency and significantly higher throughput. We scale Griffin up to 14B parameters, and explain how to shard our models for efficient distributed training.
The CLRS Algorithmic Reasoning Benchmark
Jun 04, 2022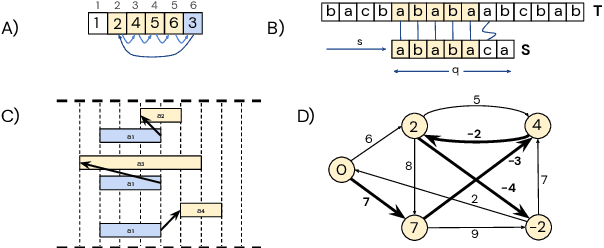
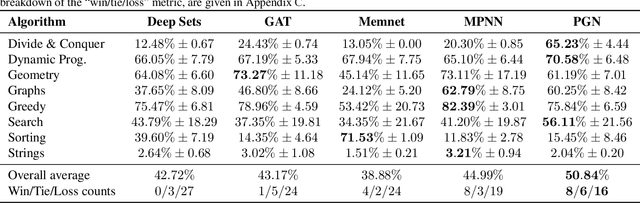

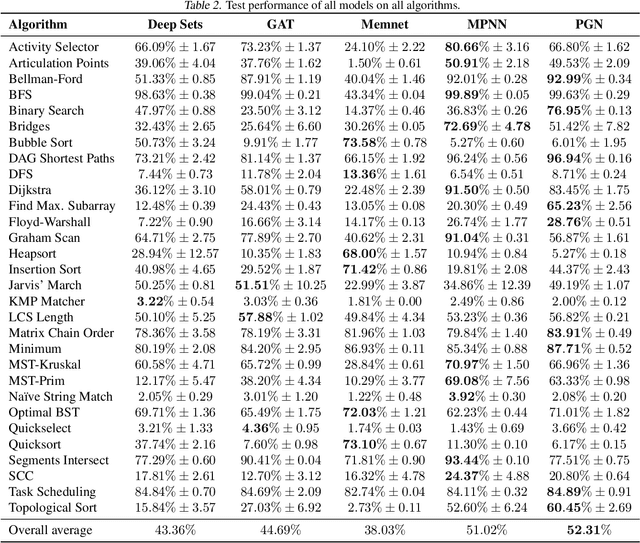
Learning representations of algorithms is an emerging area of machine learning, seeking to bridge concepts from neural networks with classical algorithms. Several important works have investigated whether neural networks can effectively reason like algorithms, typically by learning to execute them. The common trend in the area, however, is to generate targeted kinds of algorithmic data to evaluate specific hypotheses, making results hard to transfer across publications, and increasing the barrier of entry. To consolidate progress and work towards unified evaluation, we propose the CLRS Algorithmic Reasoning Benchmark, covering classical algorithms from the Introduction to Algorithms textbook. Our benchmark spans a variety of algorithmic reasoning procedures, including sorting, searching, dynamic programming, graph algorithms, string algorithms and geometric algorithms. We perform extensive experiments to demonstrate how several popular algorithmic reasoning baselines perform on these tasks, and consequently, highlight links to several open challenges. Our library is readily available at https://github.com/deepmind/clrs.
Unified Scaling Laws for Routed Language Models
Feb 09, 2022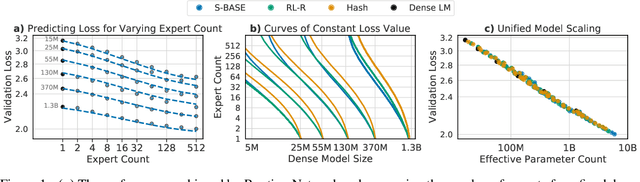

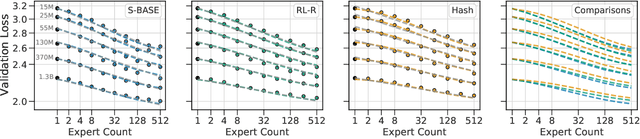
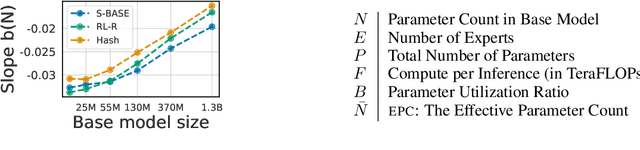
The performance of a language model has been shown to be effectively modeled as a power-law in its parameter count. Here we study the scaling behaviors of Routing Networks: architectures that conditionally use only a subset of their parameters while processing an input. For these models, parameter count and computational requirement form two independent axes along which an increase leads to better performance. In this work we derive and justify scaling laws defined on these two variables which generalize those known for standard language models and describe the performance of a wide range of routing architectures trained via three different techniques. Afterwards we provide two applications of these laws: first deriving an Effective Parameter Count along which all models scale at the same rate, and then using the scaling coefficients to give a quantitative comparison of the three routing techniques considered. Our analysis derives from an extensive evaluation of Routing Networks across five orders of magnitude of size, including models with hundreds of experts and hundreds of billions of parameters.
Scaling Language Models: Methods, Analysis & Insights from Training Gopher
Dec 08, 2021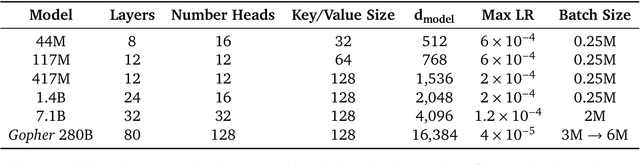
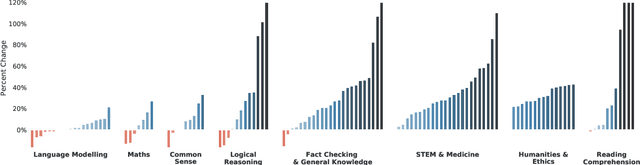
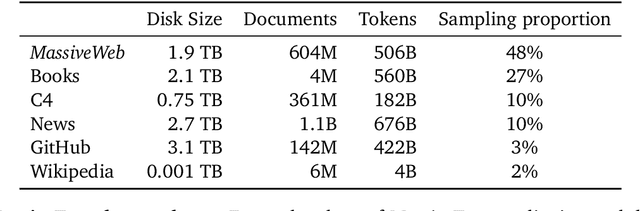
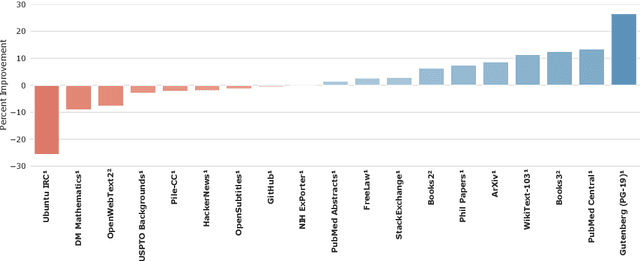
Language modelling provides a step towards intelligent communication systems by harnessing large repositories of written human knowledge to better predict and understand the world. In this paper, we present an analysis of Transformer-based language model performance across a wide range of model scales -- from models with tens of millions of parameters up to a 280 billion parameter model called Gopher. These models are evaluated on 152 diverse tasks, achieving state-of-the-art performance across the majority. Gains from scale are largest in areas such as reading comprehension, fact-checking, and the identification of toxic language, but logical and mathematical reasoning see less benefit. We provide a holistic analysis of the training dataset and model's behaviour, covering the intersection of model scale with bias and toxicity. Finally we discuss the application of language models to AI safety and the mitigation of downstream harms.
Large-scale graph representation learning with very deep GNNs and self-supervision
Jul 20, 2021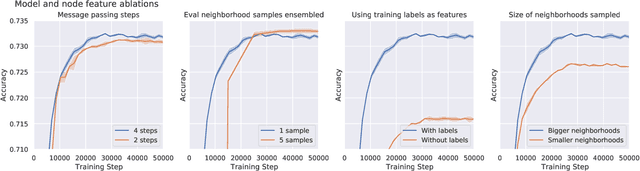
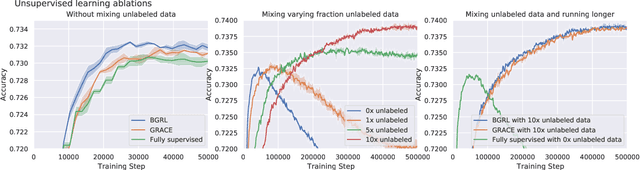
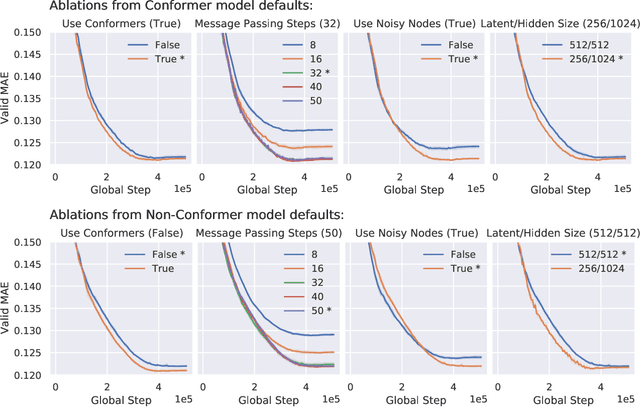
Effectively and efficiently deploying graph neural networks (GNNs) at scale remains one of the most challenging aspects of graph representation learning. Many powerful solutions have only ever been validated on comparatively small datasets, often with counter-intuitive outcomes -- a barrier which has been broken by the Open Graph Benchmark Large-Scale Challenge (OGB-LSC). We entered the OGB-LSC with two large-scale GNNs: a deep transductive node classifier powered by bootstrapping, and a very deep (up to 50-layer) inductive graph regressor regularised by denoising objectives. Our models achieved an award-level (top-3) performance on both the MAG240M and PCQM4M benchmarks. In doing so, we demonstrate evidence of scalable self-supervised graph representation learning, and utility of very deep GNNs -- both very important open issues. Our code is publicly available at: https://github.com/deepmind/deepmind-research/tree/master/ogb_lsc.
A Combinatorial Perspective on Transfer Learning
Oct 23, 2020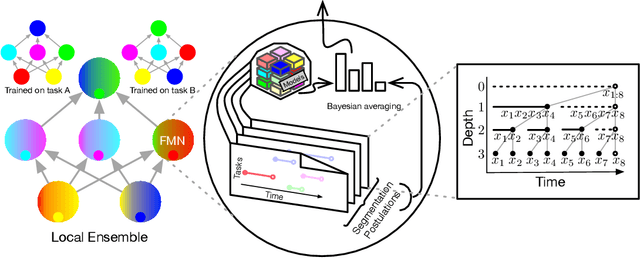
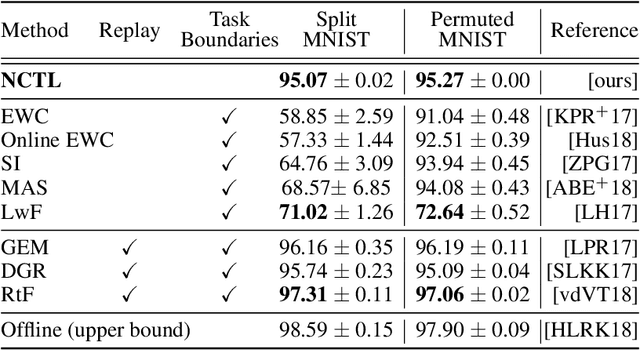
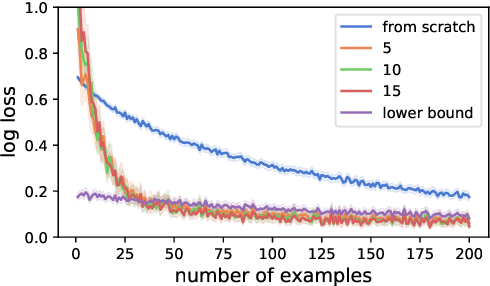
Human intelligence is characterized not only by the capacity to learn complex skills, but the ability to rapidly adapt and acquire new skills within an ever-changing environment. In this work we study how the learning of modular solutions can allow for effective generalization to both unseen and potentially differently distributed data. Our main postulate is that the combination of task segmentation, modular learning and memory-based ensembling can give rise to generalization on an exponentially growing number of unseen tasks. We provide a concrete instantiation of this idea using a combination of: (1) the Forget-Me-Not Process, for task segmentation and memory based ensembling; and (2) Gated Linear Networks, which in contrast to contemporary deep learning techniques use a modular and local learning mechanism. We demonstrate that this system exhibits a number of desirable continual learning properties: robustness to catastrophic forgetting, no negative transfer and increasing levels of positive transfer as more tasks are seen. We show competitive performance against both offline and online methods on standard continual learning benchmarks.
Gaussian Gated Linear Networks
Jun 10, 2020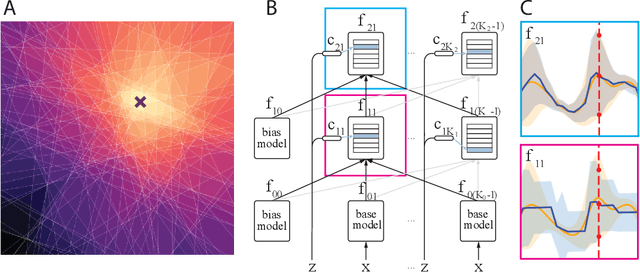
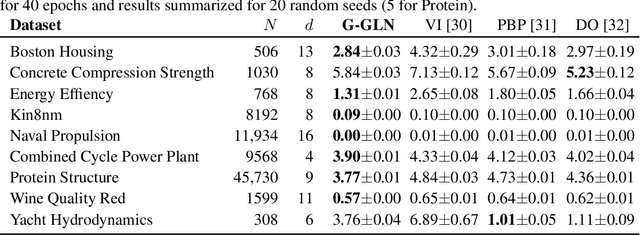
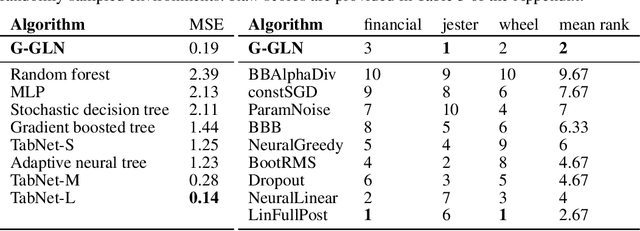
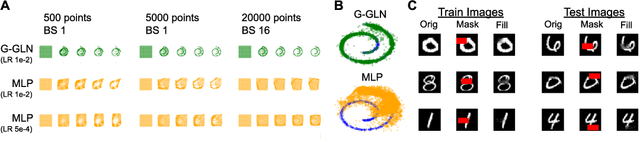
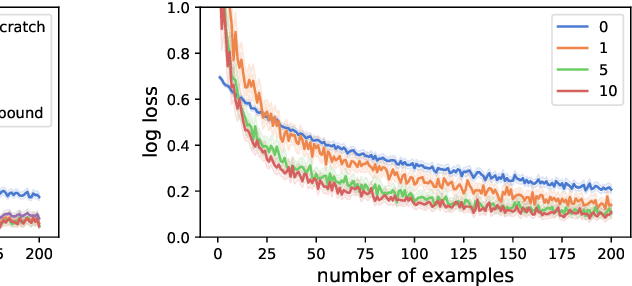
We propose the Gaussian Gated Linear Network (G-GLN), an extension to the recently proposed GLN family of deep neural networks. Instead of using backpropagation to learn features, GLNs have a distributed and local credit assignment mechanism based on optimizing a convex objective. This gives rise to many desirable properties including universality, data-efficient online learning, trivial interpretability and robustness to catastrophic forgetting. We extend the GLN framework from classification to multiple regression and density modelling by generalizing geometric mixing to a product of Gaussian densities. The G-GLN achieves competitive or state-of-the-art performance on several univariate and multivariate regression benchmarks, and we demonstrate its applicability to practical tasks including online contextual bandits and density estimation via denoising.
Online Learning in Contextual Bandits using Gated Linear Networks
Feb 21, 2020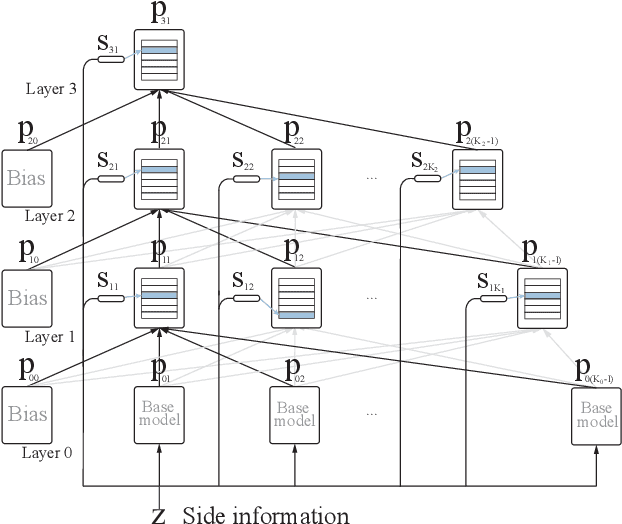
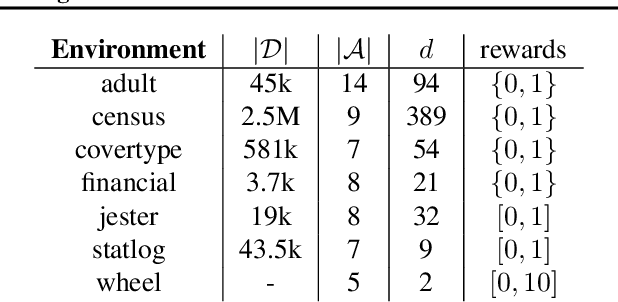
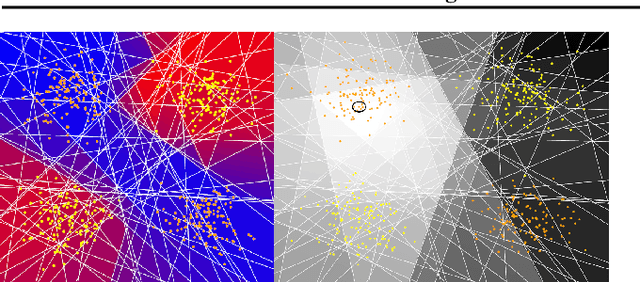
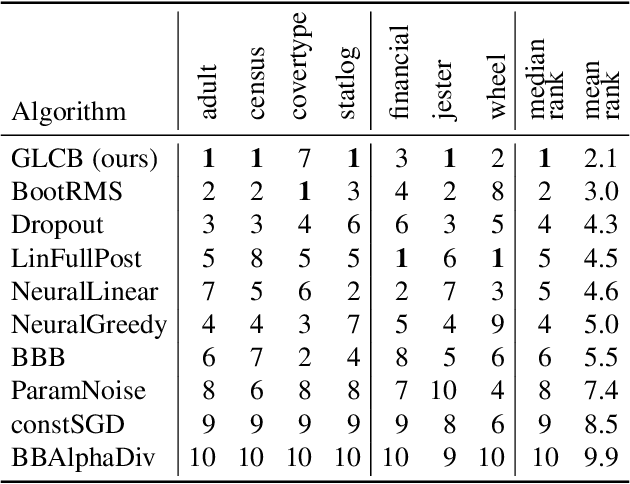
We introduce a new and completely online contextual bandit algorithm called Gated Linear Contextual Bandits (GLCB). This algorithm is based on Gated Linear Networks (GLNs), a recently introduced deep learning architecture with properties well-suited to the online setting. Leveraging data-dependent gating properties of the GLN we are able to estimate prediction uncertainty with effectively zero algorithmic overhead. We empirically evaluate GLCB compared to 9 state-of-the-art algorithms that leverage deep neural networks, on a standard benchmark suite of discrete and continuous contextual bandit problems. GLCB obtains median first-place despite being the only online method, and we further support these results with a theoretical study of its convergence properties.
Task-Relevant Adversarial Imitation Learning
Oct 02, 2019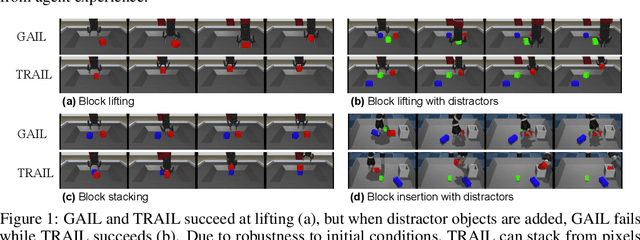
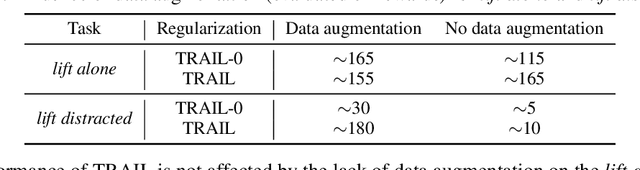
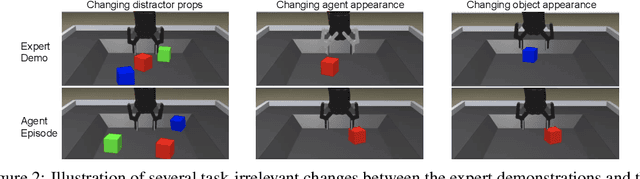
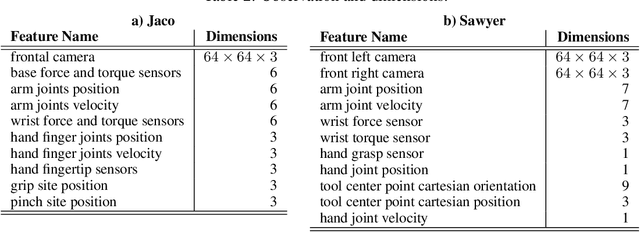
We show that a critical problem in adversarial imitation from high-dimensional sensory data is the tendency of discriminator networks to distinguish agent and expert behaviour using task-irrelevant features beyond the control of the agent. We analyze this problem in detail and propose a solution as well as several baselines that outperform standard Generative Adversarial Imitation Learning (GAIL). Our proposed solution, Task-Relevant Adversarial Imitation Learning (TRAIL), uses a constrained optimization objective to overcome task-irrelevant features. Comprehensive experiments show that TRAIL can solve challenging manipulation tasks from pixels by imitating human operators, where other agents such as behaviour cloning (BC), standard GAIL, improved GAIL variants including our newly proposed baselines, and Deterministic Policy Gradients from Demonstrations (DPGfD) fail to find solutions, even when the other agents have access to task reward.