 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Human-level Atari 200x faster
Sep 15, 2022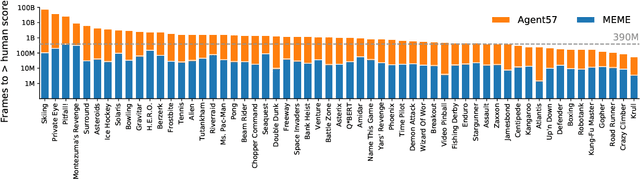
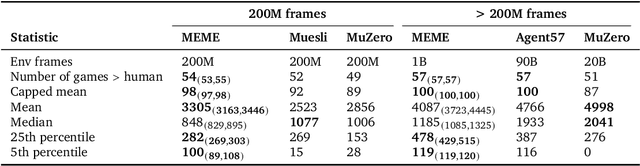
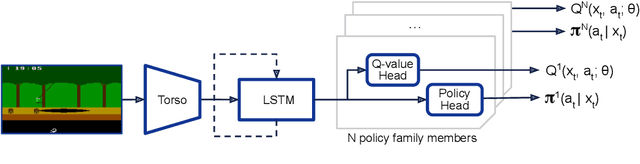
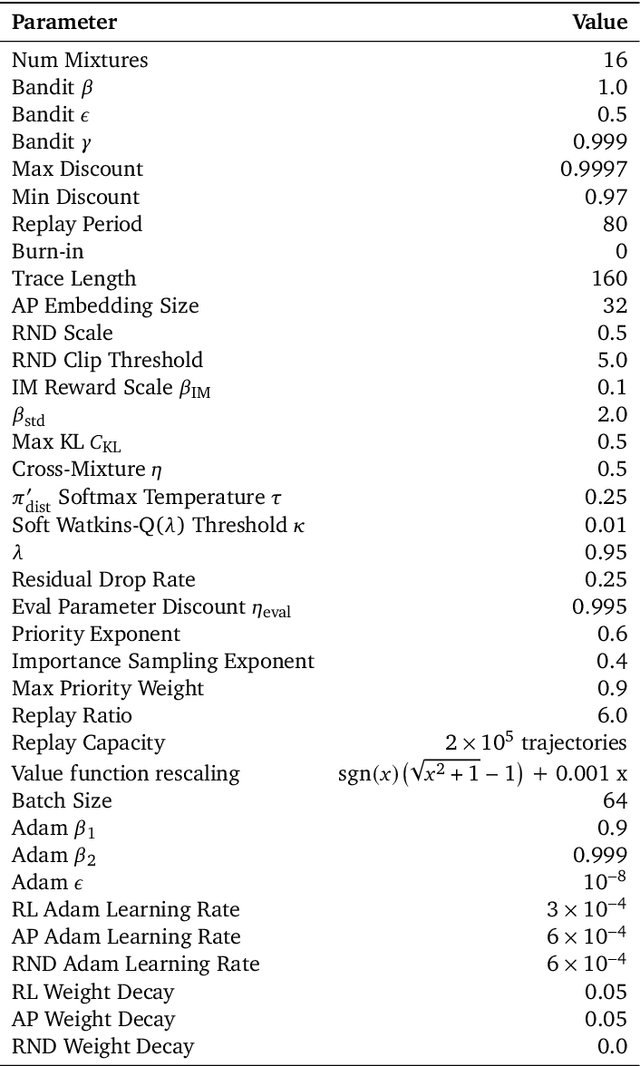
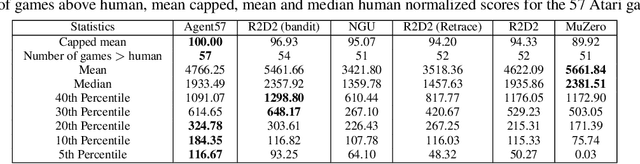
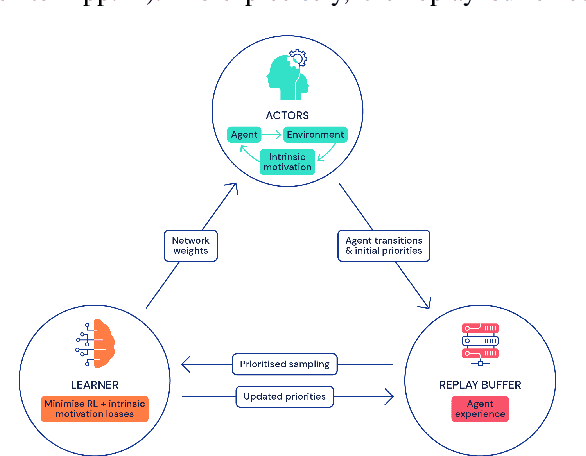
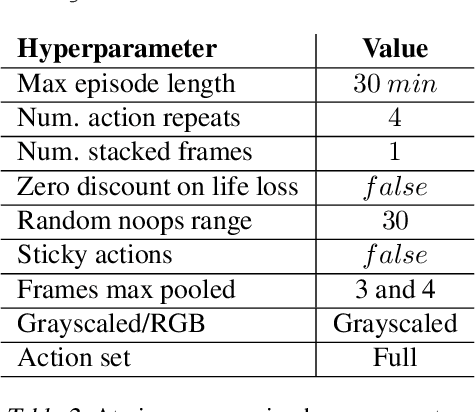
The task of building general agents that perform well over a wide range of tasks has been an important goal in reinforcement learning since its inception. The problem has been subject of research of a large body of work, with performance frequently measured by observing scores over the wide range of environments contained in the Atari 57 benchmark. Agent57 was the first agent to surpass the human benchmark on all 57 games, but this came at the cost of poor data-efficiency, requiring nearly 80 billion frames of experience to achieve. Taking Agent57 as a starting point, we employ a diverse set of strategies to achieve a 200-fold reduction of experience needed to out perform the human baseline. We investigate a range of instabilities and bottlenecks we encountered while reducing the data regime, and propose effective solutions to build a more robust and efficient agent. We also demonstrate competitive performance with high-performing methods such as Muesli and MuZero. The four key components to our approach are (1) an approximate trust region method which enables stable bootstrapping from the online network, (2) a normalisation scheme for the loss and priorities which improves robustness when learning a set of value functions with a wide range of scales, (3) an improved architecture employing techniques from NFNets in order to leverage deeper networks without the need for normalization layers, and (4) a policy distillation method which serves to smooth out the instantaneous greedy policy overtime.
The CLRS Algorithmic Reasoning Benchmark
Jun 04, 2022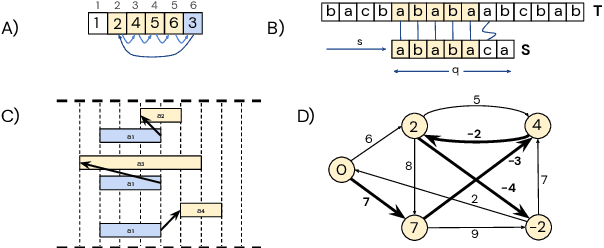
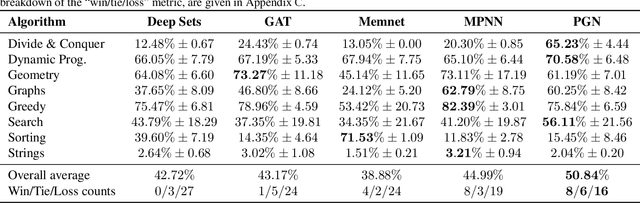

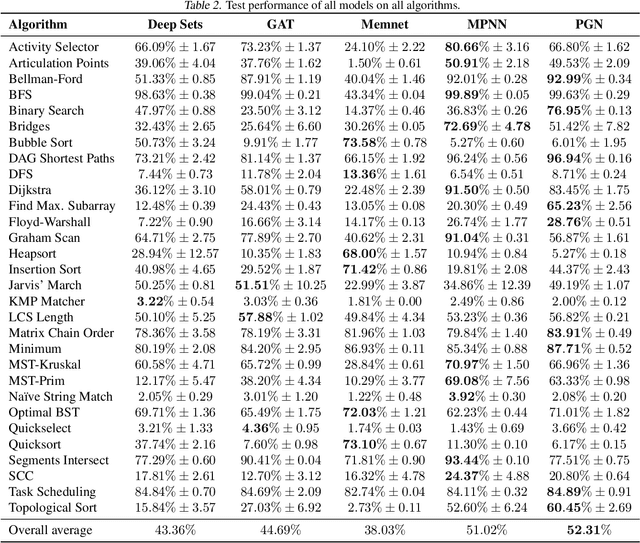
Learning representations of algorithms is an emerging area of machine learning, seeking to bridge concepts from neural networks with classical algorithms. Several important works have investigated whether neural networks can effectively reason like algorithms, typically by learning to execute them. The common trend in the area, however, is to generate targeted kinds of algorithmic data to evaluate specific hypotheses, making results hard to transfer across publications, and increasing the barrier of entry. To consolidate progress and work towards unified evaluation, we propose the CLRS Algorithmic Reasoning Benchmark, covering classical algorithms from the Introduction to Algorithms textbook. Our benchmark spans a variety of algorithmic reasoning procedures, including sorting, searching, dynamic programming, graph algorithms, string algorithms and geometric algorithms. We perform extensive experiments to demonstrate how several popular algorithmic reasoning baselines perform on these tasks, and consequently, highlight links to several open challenges. Our library is readily available at https://github.com/deepmind/clrs.
Coverage as a Principle for Discovering Transferable Behavior in Reinforcement Learning
Feb 24, 2021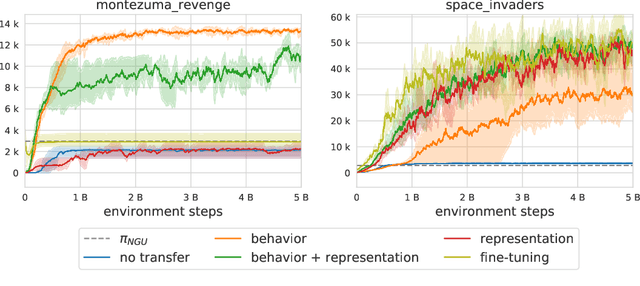
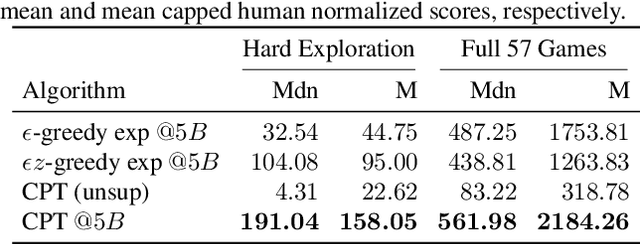
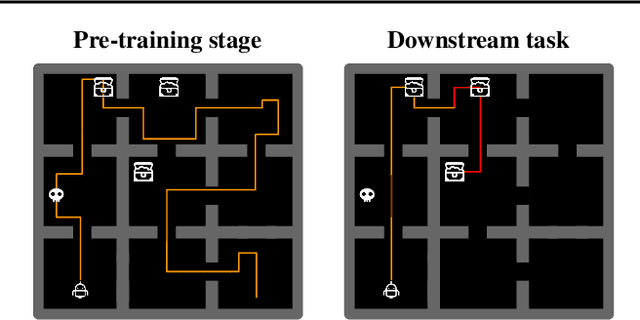
Designing agents that acquire knowledge autonomously and use it to solve new tasks efficiently is an important challenge in reinforcement learning, and unsupervised learning provides a useful paradigm for autonomous acquisition of task-agnostic knowledge. In supervised settings, representations discovered through unsupervised pre-training offer important benefits when transferred to downstream tasks. Given the nature of the reinforcement learning problem, we argue that representation alone is not enough for efficient transfer in challenging domains and explore how to transfer knowledge through behavior. The behavior of pre-trained policies may be used for solving the task at hand (exploitation), as well as for collecting useful data to solve the problem (exploration). We argue that policies pre-trained to maximize coverage will produce behavior that is useful for both strategies. When using these policies for both exploitation and exploration, our agents discover better solutions. The largest gains are generally observed in domains requiring structured exploration, including settings where the behavior of the pre-trained policies is misaligned with the downstream task.
Agent57: Outperforming the Atari Human Benchmark
Mar 30, 2020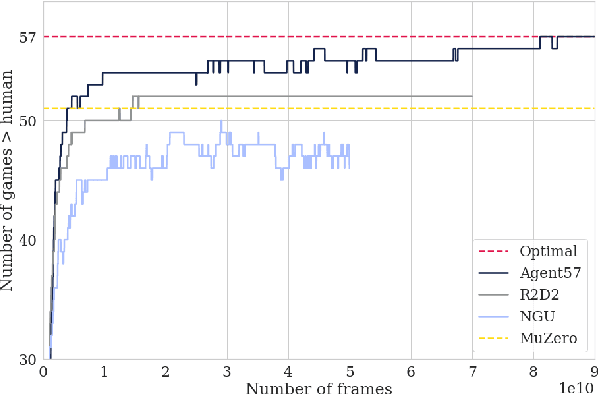
Atari games have been a long-standing benchmark in the reinforcement learning (RL) community for the past decade. This benchmark was proposed to test general competency of RL algorithms. Previous work has achieved good average performance by doing outstandingly well on many games of the set, but very poorly in several of the most challenging games. We propose Agent57, the first deep RL agent that outperforms the standard human benchmark on all 57 Atari games. To achieve this result, we train a neural network which parameterizes a family of policies ranging from very exploratory to purely exploitative. We propose an adaptive mechanism to choose which policy to prioritize throughout the training process. Additionally, we utilize a novel parameterization of the architecture that allows for more consistent and stable learning.
Never Give Up: Learning Directed Exploration Strategies
Feb 14, 2020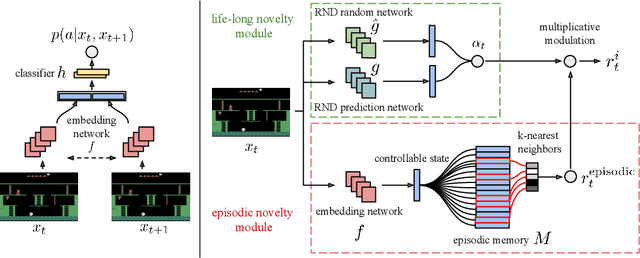
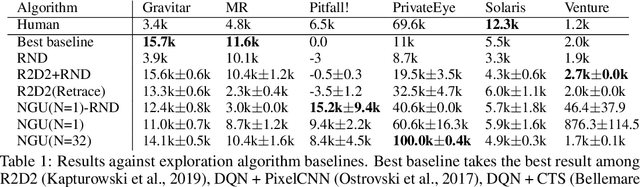
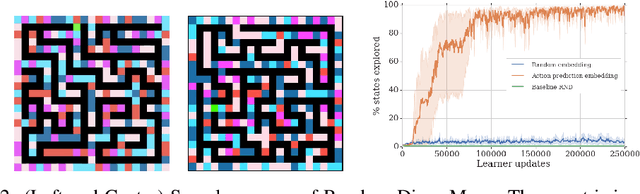
We propose a reinforcement learning agent to solve hard exploration games by learning a range of directed exploratory policies. We construct an episodic memory-based intrinsic reward using k-nearest neighbors over the agent's recent experience to train the directed exploratory policies, thereby encouraging the agent to repeatedly revisit all states in its environment. A self-supervised inverse dynamics model is used to train the embeddings of the nearest neighbour lookup, biasing the novelty signal towards what the agent can control. We employ the framework of Universal Value Function Approximators (UVFA) to simultaneously learn many directed exploration policies with the same neural network, with different trade-offs between exploration and exploitation. By using the same neural network for different degrees of exploration/exploitation, transfer is demonstrated from predominantly exploratory policies yielding effective exploitative policies. The proposed method can be incorporated to run with modern distributed RL agents that collect large amounts of experience from many actors running in parallel on separate environment instances. Our method doubles the performance of the base agent in all hard exploration in the Atari-57 suite while maintaining a very high score across the remaining games, obtaining a median human normalised score of 1344.0%. Notably, the proposed method is the first algorithm to achieve non-zero rewards (with a mean score of 8,400) in the game of Pitfall! without using demonstrations or hand-crafted features.
MEMO: A Deep Network for Flexible Combination of Episodic Memories
Jan 29, 2020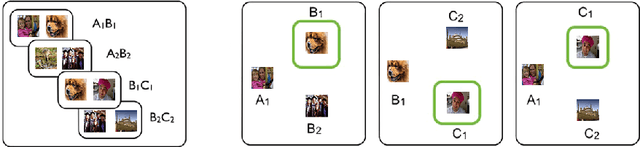
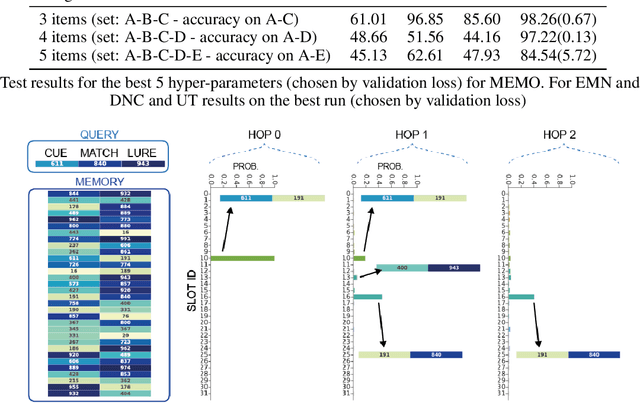
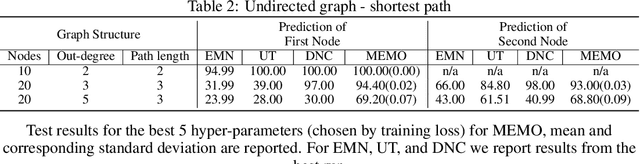

Recent research developing neural network architectures with external memory have often used the benchmark bAbI question and answering dataset which provides a challenging number of tasks requiring reasoning. Here we employed a classic associative inference task from the memory-based reasoning neuroscience literature in order to more carefully probe the reasoning capacity of existing memory-augmented architectures. This task is thought to capture the essence of reasoning -- the appreciation of distant relationships among elements distributed across multiple facts or memories. Surprisingly, we found that current architectures struggle to reason over long distance associations. Similar results were obtained on a more complex task involving finding the shortest path between nodes in a path. We therefore developed MEMO, an architecture endowed with the capacity to reason over longer distances. This was accomplished with the addition of two novel components. First, it introduces a separation between memories (facts) stored in external memory and the items that comprise these facts in external memory. Second, it makes use of an adaptive retrieval mechanism, allowing a variable number of "memory hops" before the answer is produced. MEMO is capable of solving our novel reasoning tasks, as well as match state of the art results in bAbI.
Generalization of Reinforcement Learners with Working and Episodic Memory
Oct 29, 2019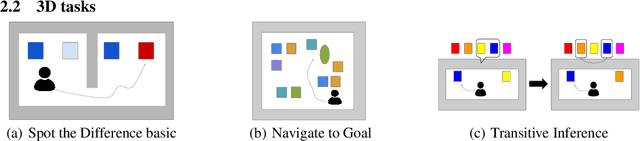
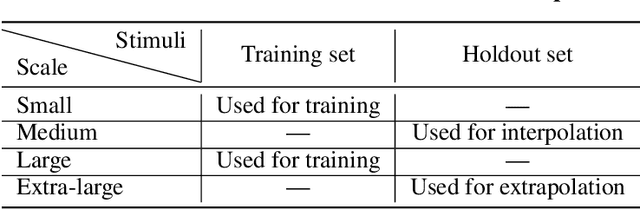
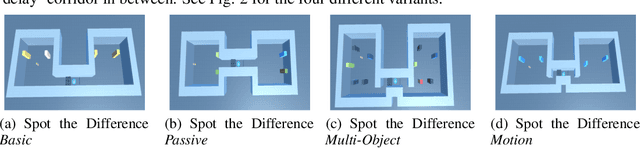
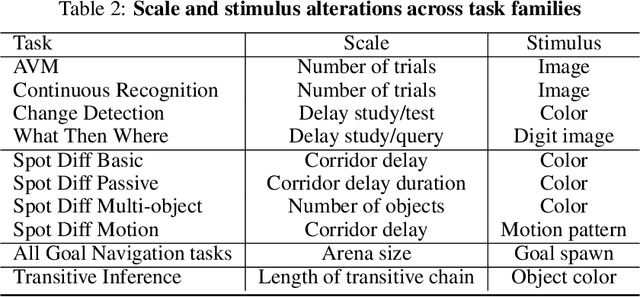
Memory is an important aspect of intelligence and plays a role in many deep reinforcement learning models. However, little progress has been made in understanding when specific memory systems help more than others and how well they generalize. The field also has yet to see a prevalent consistent and rigorous approach for evaluating agent performance on holdout data. In this paper, we aim to develop a comprehensive methodology to test different kinds of memory in an agent and assess how well the agent can apply what it learns in training to a holdout set that differs from the training set along dimensions that we suggest are relevant for evaluating memory-specific generalization. To that end, we first construct a diverse set of memory tasks that allow us to evaluate test-time generalization across multiple dimensions. Second, we develop and perform multiple ablations on an agent architecture that combines multiple memory systems, observe its baseline models, and investigate its performance against the task suite.
Memory-based Parameter Adaptation
Feb 28, 2018
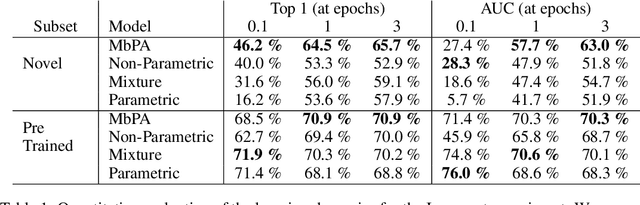


Deep neural networks have excelled on a wide range of problems, from vision to language and game playing. Neural networks very gradually incorporate information into weights as they process data, requiring very low learning rates. If the training distribution shifts, the network is slow to adapt, and when it does adapt, it typically performs badly on the training distribution before the shift. Our method, Memory-based Parameter Adaptation, stores examples in memory and then uses a context-based lookup to directly modify the weights of a neural network. Much higher learning rates can be used for this local adaptation, reneging the need for many iterations over similar data before good predictions can be made. As our method is memory-based, it alleviates several shortcomings of neural networks, such as catastrophic forgetting, fast, stable acquisition of new knowledge, learning with an imbalanced class labels, and fast learning during evaluation. We demonstrate this on a range of supervised tasks: large-scale image classification and language modelling.
Asynchronous Methods for Deep Reinforcement Learning
Jun 16, 2016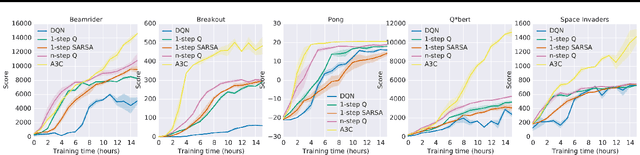
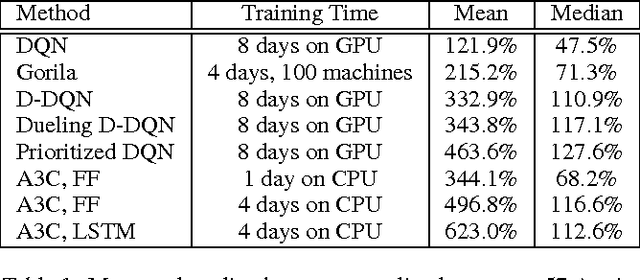
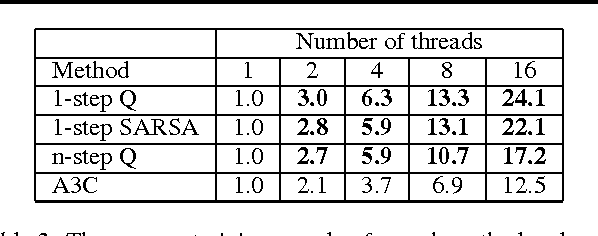
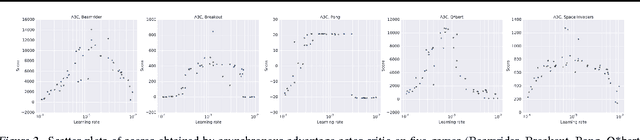
We propose a conceptually simple and lightweight framework for deep reinforcement learning that uses asynchronous gradient descent for optimization of deep neural network controllers. We present asynchronous variants of four standard reinforcement learning algorithms and show that parallel actor-learners have a stabilizing effect on training allowing all four methods to successfully train neural network controllers. The best performing method, an asynchronous variant of actor-critic, surpasses the current state-of-the-art on the Atari domain while training for half the time on a single multi-core CPU instead of a GPU. Furthermore, we show that asynchronous actor-critic succeeds on a wide variety of continuous motor control problems as well as on a new task of navigating random 3D mazes using a visual input.