 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline Regularised Reinforcement Learning for Large Language Models Alignment
May 29, 2024The dominant framework for alignment of large language models (LLM), whether through reinforcement learning from human feedback or direct preference optimisation, is to learn from preference data. This involves building datasets where each element is a quadruplet composed of a prompt, two independent responses (completions of the prompt) and a human preference between the two independent responses, yielding a preferred and a dis-preferred response. Such data is typically scarce and expensive to collect. On the other hand, \emph{single-trajectory} datasets where each element is a triplet composed of a prompt, a response and a human feedback is naturally more abundant. The canonical element of such datasets is for instance an LLM's response to a user's prompt followed by a user's feedback such as a thumbs-up/down. Consequently, in this work, we propose DRO, or \emph{Direct Reward Optimisation}, as a framework and associated algorithms that do not require pairwise preferences. DRO uses a simple mean-squared objective that can be implemented in various ways. We validate our findings empirically, using T5 encoder-decoder language models, and show DRO's performance over selected baselines such as Kahneman-Tversky Optimization (KTO). Thus, we confirm that DRO is a simple and empirically compelling method for single-trajectory policy optimisation.
Human Alignment of Large Language Models through Online Preference Optimisation
Mar 13, 2024



Ensuring alignment of language models' outputs with human preferences is critical to guarantee a useful, safe, and pleasant user experience. Thus, human alignment has been extensively studied recently and several methods such as Reinforcement Learning from Human Feedback (RLHF), Direct Policy Optimisation (DPO) and Sequence Likelihood Calibration (SLiC) have emerged. In this paper, our contribution is two-fold. First, we show the equivalence between two recent alignment methods, namely Identity Policy Optimisation (IPO) and Nash Mirror Descent (Nash-MD). Second, we introduce a generalisation of IPO, named IPO-MD, that leverages the regularised sampling approach proposed by Nash-MD. This equivalence may seem surprising at first sight, since IPO is an offline method whereas Nash-MD is an online method using a preference model. However, this equivalence can be proven when we consider the online version of IPO, that is when both generations are sampled by the online policy and annotated by a trained preference model. Optimising the IPO loss with such a stream of data becomes then equivalent to finding the Nash equilibrium of the preference model through self-play. Building on this equivalence, we introduce the IPO-MD algorithm that generates data with a mixture policy (between the online and reference policy) similarly as the general Nash-MD algorithm. We compare online-IPO and IPO-MD to different online versions of existing losses on preference data such as DPO and SLiC on a summarisation task.
A General Theoretical Paradigm to Understand Learning from Human Preferences
Oct 18, 2023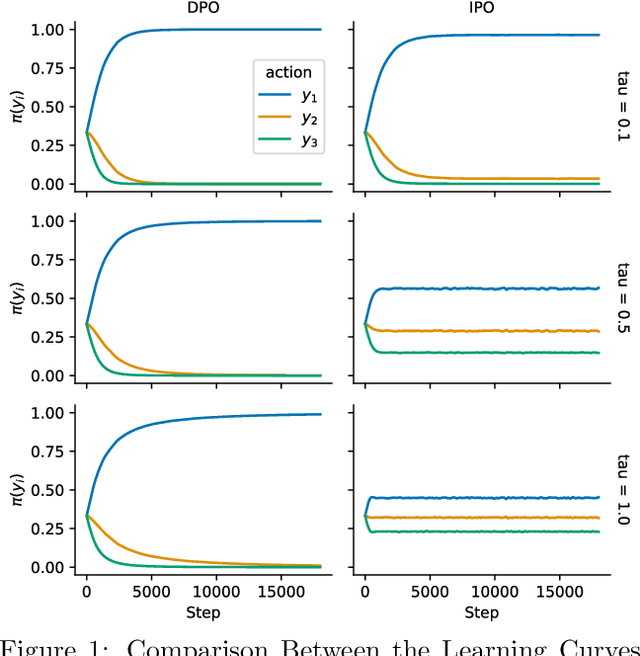

The prevalent deployment of learning from human preferences through reinforcement learning (RLHF) relies on two important approximations: the first assumes that pairwise preferences can be substituted with pointwise rewards. The second assumes that a reward model trained on these pointwise rewards can generalize from collected data to out-of-distribution data sampled by the policy. Recently, Direct Preference Optimisation (DPO) has been proposed as an approach that bypasses the second approximation and learn directly a policy from collected data without the reward modelling stage. However, this method still heavily relies on the first approximation. In this paper we try to gain a deeper theoretical understanding of these practical algorithms. In particular we derive a new general objective called $\Psi$PO for learning from human preferences that is expressed in terms of pairwise preferences and therefore bypasses both approximations. This new general objective allows us to perform an in-depth analysis of the behavior of RLHF and DPO (as special cases of $\Psi$PO) and to identify their potential pitfalls. We then consider another special case for $\Psi$PO by setting $\Psi$ simply to Identity, for which we can derive an efficient optimisation procedure, prove performance guarantees and demonstrate its empirical superiority to DPO on some illustrative examples.
Bootstrap Latent-Predictive Representations for Multitask Reinforcement Learning
Apr 30, 2020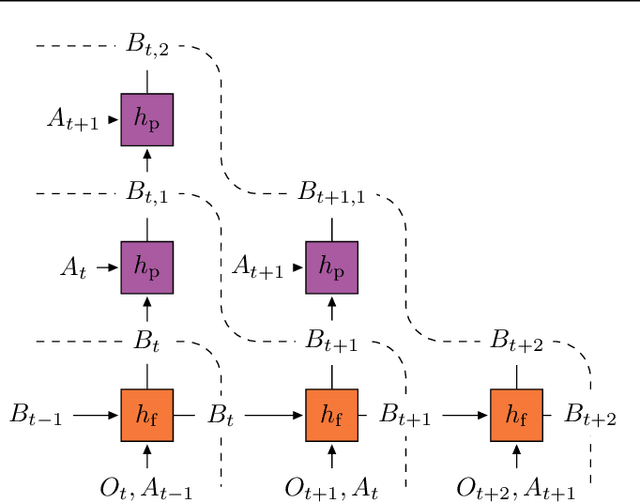
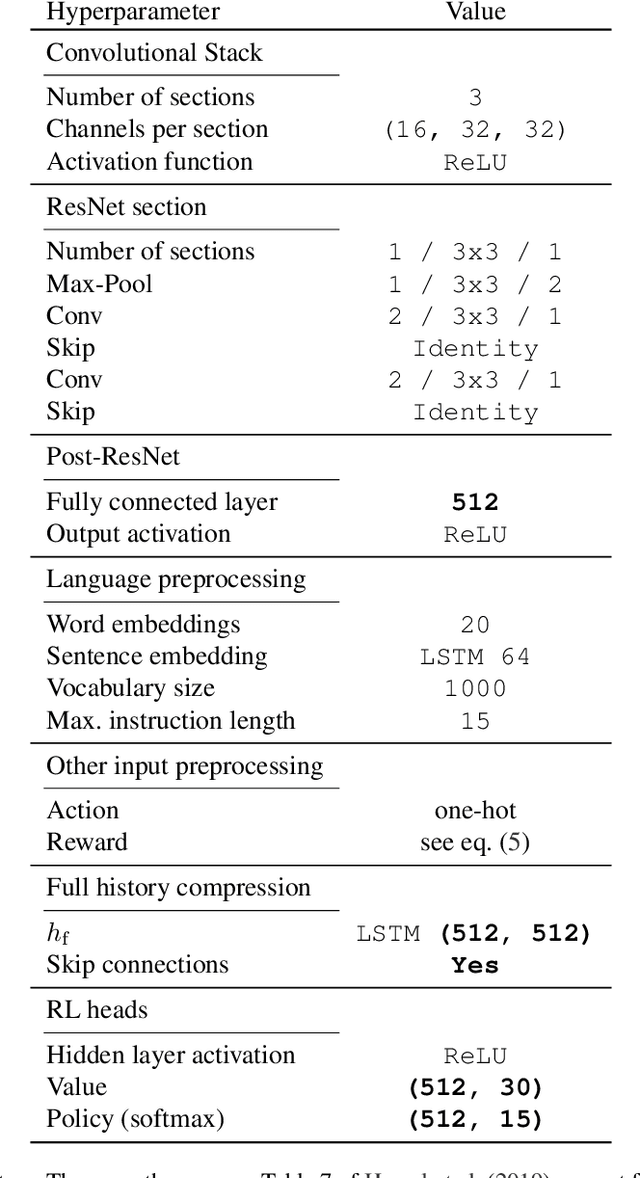
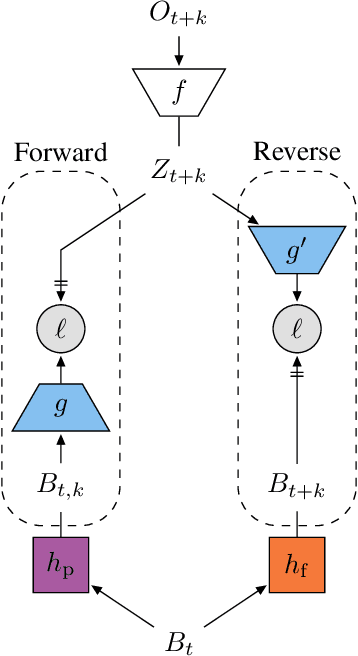
Learning a good representation is an essential component for deep reinforcement learning (RL). Representation learning is especially important in multitask and partially observable settings where building a representation of the unknown environment is crucial to solve the tasks. Here we introduce Prediction of Bootstrap Latents (PBL), a simple and flexible self-supervised representation learning algorithm for multitask deep RL. PBL builds on multistep predictive representations of future observations, and focuses on capturing structured information about environment dynamics. Specifically, PBL trains its representation by predicting latent embeddings of future observations. These latent embeddings are themselves trained to be predictive of the aforementioned representations. These predictions form a bootstrapping effect, allowing the agent to learn more about the key aspects of the environment dynamics. In addition, by defining prediction tasks completely in latent space, PBL provides the flexibility of using multimodal observations involving pixel images, language instructions, rewards and more. We show in our experiments that PBL delivers across-the-board improved performance over state of the art deep RL agents in the DMLab-30 and Atari-57 multitask setting.
Agent57: Outperforming the Atari Human Benchmark
Mar 30, 2020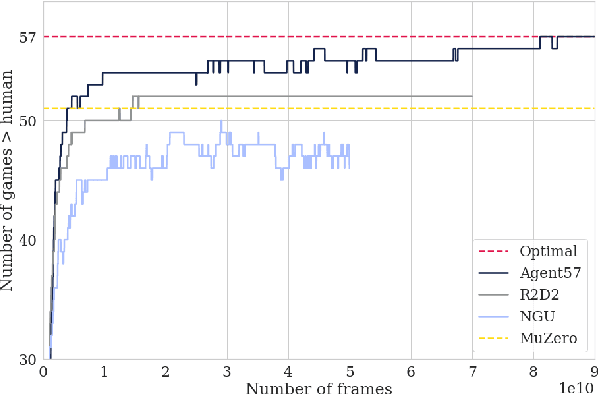
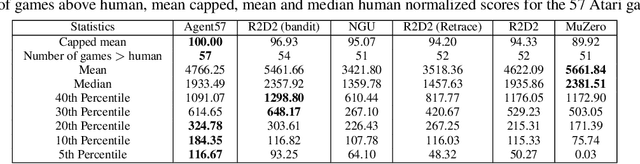
Atari games have been a long-standing benchmark in the reinforcement learning (RL) community for the past decade. This benchmark was proposed to test general competency of RL algorithms. Previous work has achieved good average performance by doing outstandingly well on many games of the set, but very poorly in several of the most challenging games. We propose Agent57, the first deep RL agent that outperforms the standard human benchmark on all 57 Atari games. To achieve this result, we train a neural network which parameterizes a family of policies ranging from very exploratory to purely exploitative. We propose an adaptive mechanism to choose which policy to prioritize throughout the training process. Additionally, we utilize a novel parameterization of the architecture that allows for more consistent and stable learning.
Never Give Up: Learning Directed Exploration Strategies
Feb 14, 2020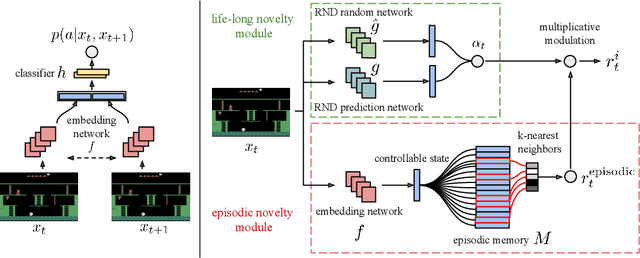
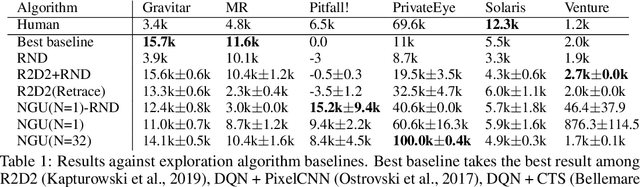
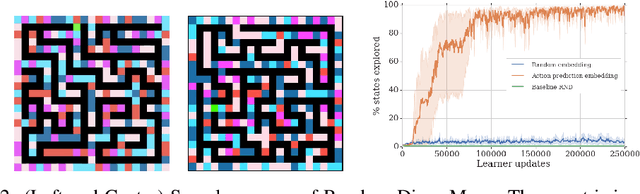
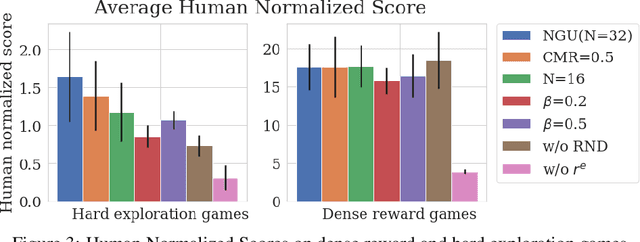
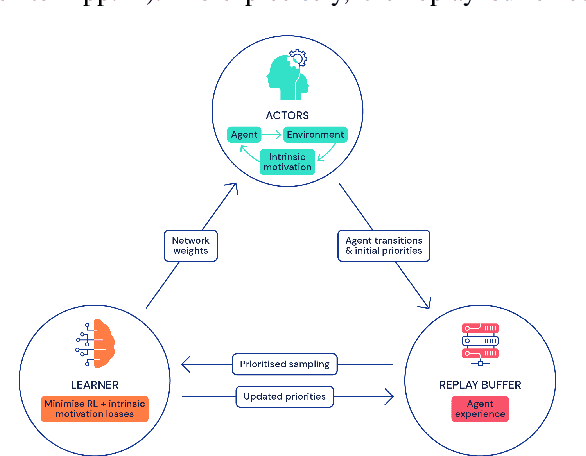
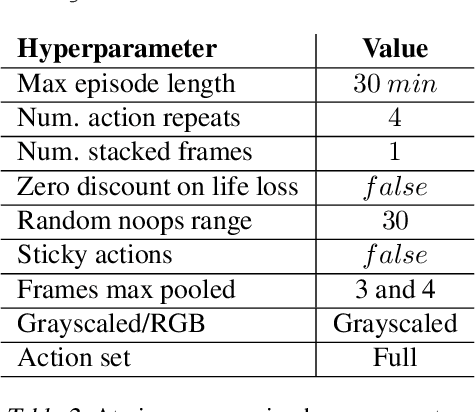
We propose a reinforcement learning agent to solve hard exploration games by learning a range of directed exploratory policies. We construct an episodic memory-based intrinsic reward using k-nearest neighbors over the agent's recent experience to train the directed exploratory policies, thereby encouraging the agent to repeatedly revisit all states in its environment. A self-supervised inverse dynamics model is used to train the embeddings of the nearest neighbour lookup, biasing the novelty signal towards what the agent can control. We employ the framework of Universal Value Function Approximators (UVFA) to simultaneously learn many directed exploration policies with the same neural network, with different trade-offs between exploration and exploitation. By using the same neural network for different degrees of exploration/exploitation, transfer is demonstrated from predominantly exploratory policies yielding effective exploitative policies. The proposed method can be incorporated to run with modern distributed RL agents that collect large amounts of experience from many actors running in parallel on separate environment instances. Our method doubles the performance of the base agent in all hard exploration in the Atari-57 suite while maintaining a very high score across the remaining games, obtaining a median human normalised score of 1344.0%. Notably, the proposed method is the first algorithm to achieve non-zero rewards (with a mean score of 8,400) in the game of Pitfall! without using demonstrations or hand-crafted features.