 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
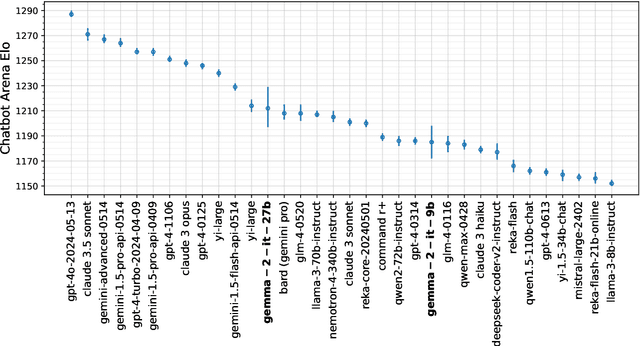
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Gemma 2: Improving Open Language Models at a Practical Size
Aug 02, 2024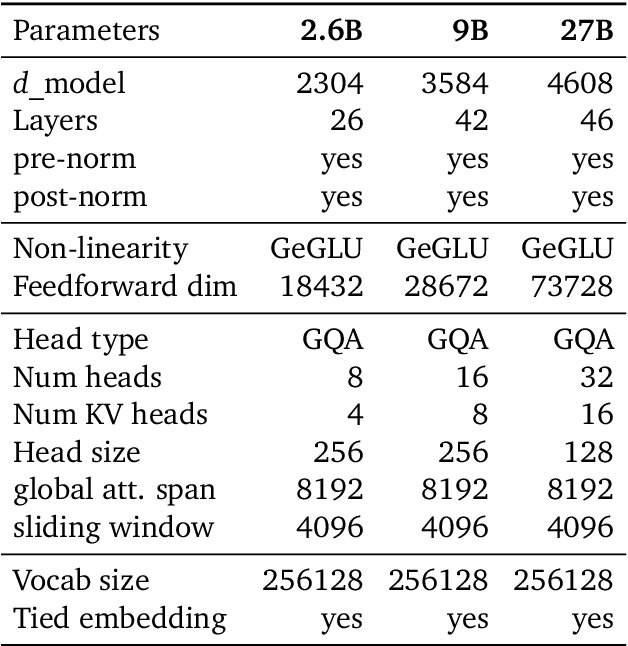
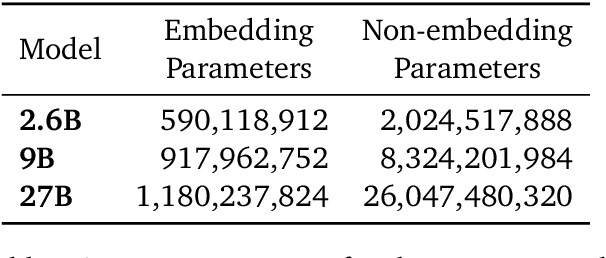
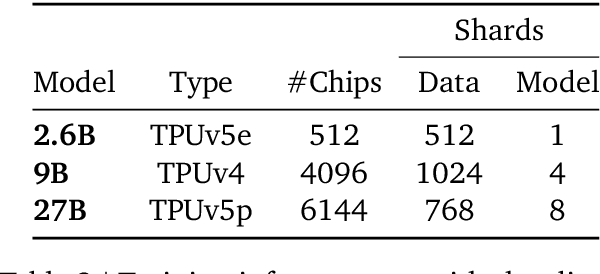
In this work, we introduce Gemma 2, a new addition to the Gemma family of lightweight, state-of-the-art open models, ranging in scale from 2 billion to 27 billion parameters. In this new version, we apply several known technical modifications to the Transformer architecture, such as interleaving local-global attentions (Beltagy et al., 2020a) and group-query attention (Ainslie et al., 2023). We also train the 2B and 9B models with knowledge distillation (Hinton et al., 2015) instead of next token prediction. The resulting models deliver the best performance for their size, and even offer competitive alternatives to models that are 2-3 times bigger. We release all our models to the community.
Human Alignment of Large Language Models through Online Preference Optimisation
Mar 13, 2024



Ensuring alignment of language models' outputs with human preferences is critical to guarantee a useful, safe, and pleasant user experience. Thus, human alignment has been extensively studied recently and several methods such as Reinforcement Learning from Human Feedback (RLHF), Direct Policy Optimisation (DPO) and Sequence Likelihood Calibration (SLiC) have emerged. In this paper, our contribution is two-fold. First, we show the equivalence between two recent alignment methods, namely Identity Policy Optimisation (IPO) and Nash Mirror Descent (Nash-MD). Second, we introduce a generalisation of IPO, named IPO-MD, that leverages the regularised sampling approach proposed by Nash-MD. This equivalence may seem surprising at first sight, since IPO is an offline method whereas Nash-MD is an online method using a preference model. However, this equivalence can be proven when we consider the online version of IPO, that is when both generations are sampled by the online policy and annotated by a trained preference model. Optimising the IPO loss with such a stream of data becomes then equivalent to finding the Nash equilibrium of the preference model through self-play. Building on this equivalence, we introduce the IPO-MD algorithm that generates data with a mixture policy (between the online and reference policy) similarly as the general Nash-MD algorithm. We compare online-IPO and IPO-MD to different online versions of existing losses on preference data such as DPO and SLiC on a summarisation task.
Gemma: Open Models Based on Gemini Research and Technology
Mar 13, 2024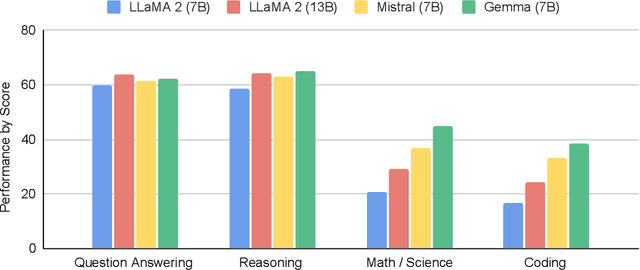
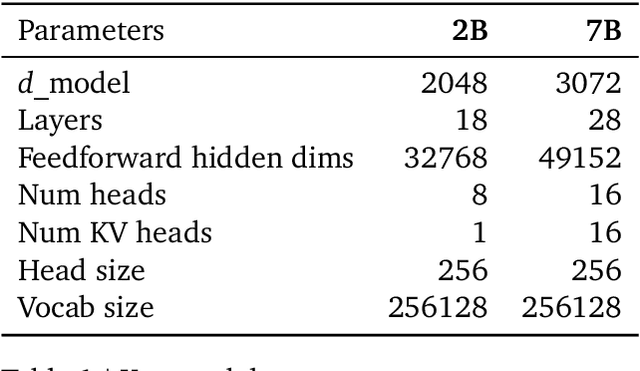
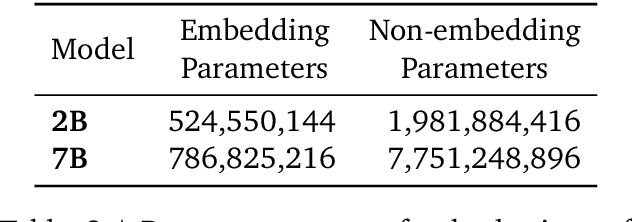
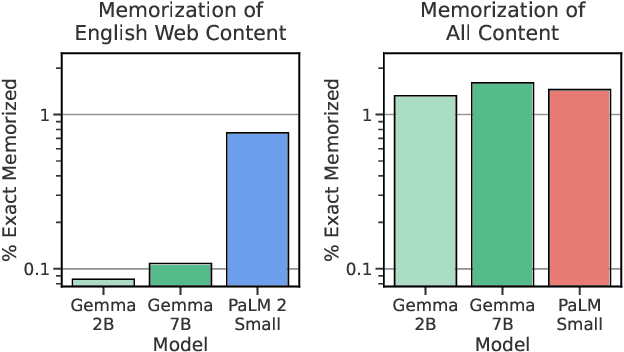
This work introduces Gemma, a family of lightweight, state-of-the art open models built from the research and technology used to create Gemini models. Gemma models demonstrate strong performance across academic benchmarks for language understanding, reasoning, and safety. We release two sizes of models (2 billion and 7 billion parameters), and provide both pretrained and fine-tuned checkpoints. Gemma outperforms similarly sized open models on 11 out of 18 text-based tasks, and we present comprehensive evaluations of safety and responsibility aspects of the models, alongside a detailed description of model development. We believe the responsible release of LLMs is critical for improving the safety of frontier models, and for enabling the next wave of LLM innovations.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Bootstrapped Representations in Reinforcement Learning
Jun 16, 2023In reinforcement learning (RL), state representations are key to dealing with large or continuous state spaces. While one of the promises of deep learning algorithms is to automatically construct features well-tuned for the task they try to solve, such a representation might not emerge from end-to-end training of deep RL agents. To mitigate this issue, auxiliary objectives are often incorporated into the learning process and help shape the learnt state representation. Bootstrapping methods are today's method of choice to make these additional predictions. Yet, it is unclear which features these algorithms capture and how they relate to those from other auxiliary-task-based approaches. In this paper, we address this gap and provide a theoretical characterization of the state representation learnt by temporal difference learning (Sutton, 1988). Surprisingly, we find that this representation differs from the features learned by Monte Carlo and residual gradient algorithms for most transition structures of the environment in the policy evaluation setting. We describe the efficacy of these representations for policy evaluation, and use our theoretical analysis to design new auxiliary learning rules. We complement our theoretical results with an empirical comparison of these learning rules for different cumulant functions on classic domains such as the four-room domain (Sutton et al, 1999) and Mountain Car (Moore, 1990).
Proto-Value Networks: Scaling Representation Learning with Auxiliary Tasks
Apr 25, 2023Auxiliary tasks improve the representations learned by deep reinforcement learning agents. Analytically, their effect is reasonably well understood; in practice, however, their primary use remains in support of a main learning objective, rather than as a method for learning representations. This is perhaps surprising given that many auxiliary tasks are defined procedurally, and hence can be treated as an essentially infinite source of information about the environment. Based on this observation, we study the effectiveness of auxiliary tasks for learning rich representations, focusing on the setting where the number of tasks and the size of the agent's network are simultaneously increased. For this purpose, we derive a new family of auxiliary tasks based on the successor measure. These tasks are easy to implement and have appealing theoretical properties. Combined with a suitable off-policy learning rule, the result is a representation learning algorithm that can be understood as extending Mahadevan & Maggioni (2007)'s proto-value functions to deep reinforcement learning -- accordingly, we call the resulting object proto-value networks. Through a series of experiments on the Arcade Learning Environment, we demonstrate that proto-value networks produce rich features that may be used to obtain performance comparable to established algorithms, using only linear approximation and a small number (~4M) of interactions with the environment's reward function.
A Novel Stochastic Gradient Descent Algorithm for Learning Principal Subspaces
Dec 08, 2022Many machine learning problems encode their data as a matrix with a possibly very large number of rows and columns. In several applications like neuroscience, image compression or deep reinforcement learning, the principal subspace of such a matrix provides a useful, low-dimensional representation of individual data. Here, we are interested in determining the $d$-dimensional principal subspace of a given matrix from sample entries, i.e. from small random submatrices. Although a number of sample-based methods exist for this problem (e.g. Oja's rule \citep{oja1982simplified}), these assume access to full columns of the matrix or particular matrix structure such as symmetry and cannot be combined as-is with neural networks \citep{baldi1989neural}. In this paper, we derive an algorithm that learns a principal subspace from sample entries, can be applied when the approximate subspace is represented by a neural network, and hence can be scaled to datasets with an effectively infinite number of rows and columns. Our method consists in defining a loss function whose minimizer is the desired principal subspace, and constructing a gradient estimate of this loss whose bias can be controlled. We complement our theoretical analysis with a series of experiments on synthetic matrices, the MNIST dataset \citep{lecun2010mnist} and the reinforcement learning domain PuddleWorld \citep{sutton1995generalization} demonstrating the usefulness of our approach.
Understanding Self-Predictive Learning for Reinforcement Learning
Dec 06, 2022



We study the learning dynamics of self-predictive learning for reinforcement learning, a family of algorithms that learn representations by minimizing the prediction error of their own future latent representations. Despite its recent empirical success, such algorithms have an apparent defect: trivial representations (such as constants) minimize the prediction error, yet it is obviously undesirable to converge to such solutions. Our central insight is that careful designs of the optimization dynamics are critical to learning meaningful representations. We identify that a faster paced optimization of the predictor and semi-gradient updates on the representation, are crucial to preventing the representation collapse. Then in an idealized setup, we show self-predictive learning dynamics carries out spectral decomposition on the state transition matrix, effectively capturing information of the transition dynamics. Building on the theoretical insights, we propose bidirectional self-predictive learning, a novel self-predictive algorithm that learns two representations simultaneously. We examine the robustness of our theoretical insights with a number of small-scale experiments and showcase the promise of the novel representation learning algorithm with large-scale experiments.