 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepresentation Learning via Non-Contrastive Mutual Information
Apr 23, 2025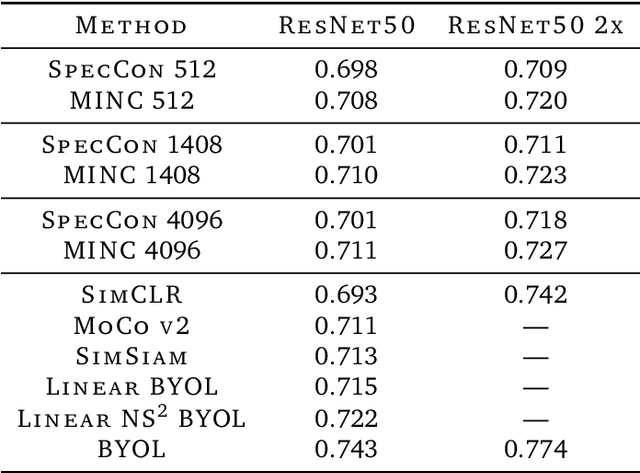
Labeling data is often very time consuming and expensive, leaving us with a majority of unlabeled data. Self-supervised representation learning methods such as SimCLR (Chen et al., 2020) or BYOL (Grill et al., 2020) have been very successful at learning meaningful latent representations from unlabeled image data, resulting in much more general and transferable representations for downstream tasks. Broadly, self-supervised methods fall into two types: 1) Contrastive methods, such as SimCLR; and 2) Non-Contrastive methods, such as BYOL. Contrastive methods are generally trying to maximize mutual information between related data points, so they need to compare every data point to every other data point, resulting in high variance, and thus requiring large batch sizes to work well. Non-contrastive methods like BYOL have much lower variance as they do not need to make pairwise comparisons, but are much trickier to implement as they have the possibility of collapsing to a constant vector. In this paper, we aim to develop a self-supervised objective that combines the strength of both types. We start with a particular contrastive method called the Spectral Contrastive Loss (HaoChen et al., 2021; Lu et al., 2024), and we convert it into a more general non-contrastive form; this removes the pairwise comparisons resulting in lower variance, but keeps the mutual information formulation of the contrastive method preventing collapse. We call our new objective the Mutual Information Non-Contrastive (MINC) loss. We test MINC by learning image representations on ImageNet (similar to SimCLR and BYOL) and show that it consistently improves upon the Spectral Contrastive loss baseline.
A Unifying Framework for Action-Conditional Self-Predictive Reinforcement Learning
Jun 04, 2024



Learning a good representation is a crucial challenge for Reinforcement Learning (RL) agents. Self-predictive learning provides means to jointly learn a latent representation and dynamics model by bootstrapping from future latent representations (BYOL). Recent work has developed theoretical insights into these algorithms by studying a continuous-time ODE model for self-predictive representation learning under the simplifying assumption that the algorithm depends on a fixed policy (BYOL-$\Pi$); this assumption is at odds with practical instantiations of such algorithms, which explicitly condition their predictions on future actions. In this work, we take a step towards bridging the gap between theory and practice by analyzing an action-conditional self-predictive objective (BYOL-AC) using the ODE framework, characterizing its convergence properties and highlighting important distinctions between the limiting solutions of the BYOL-$\Pi$ and BYOL-AC dynamics. We show how the two representations are related by a variance equation. This connection leads to a novel variance-like action-conditional objective (BYOL-VAR) and its corresponding ODE. We unify the study of all three objectives through two complementary lenses; a model-based perspective, where each objective is shown to be equivalent to a low-rank approximation of certain dynamics, and a model-free perspective, which establishes relationships between the objectives and their respective value, Q-value, and advantage function. Our empirical investigations, encompassing both linear function approximation and Deep RL environments, demonstrates that BYOL-AC is better overall in a variety of different settings.
Generalized Preference Optimization: A Unified Approach to Offline Alignment
Feb 08, 2024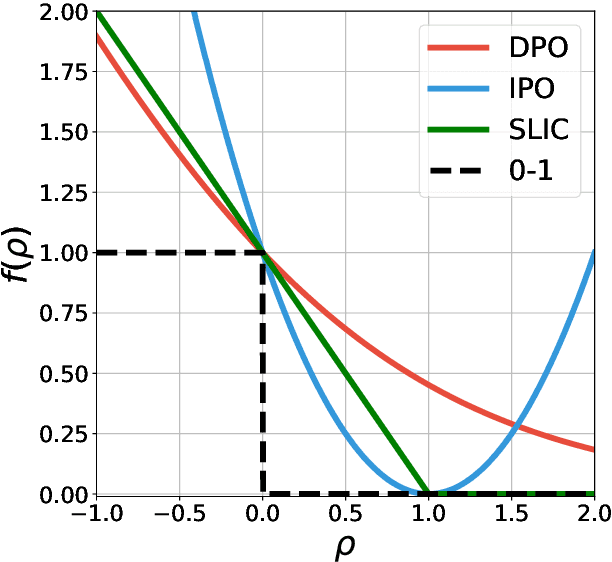
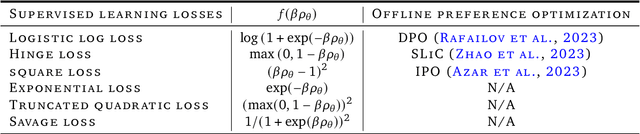
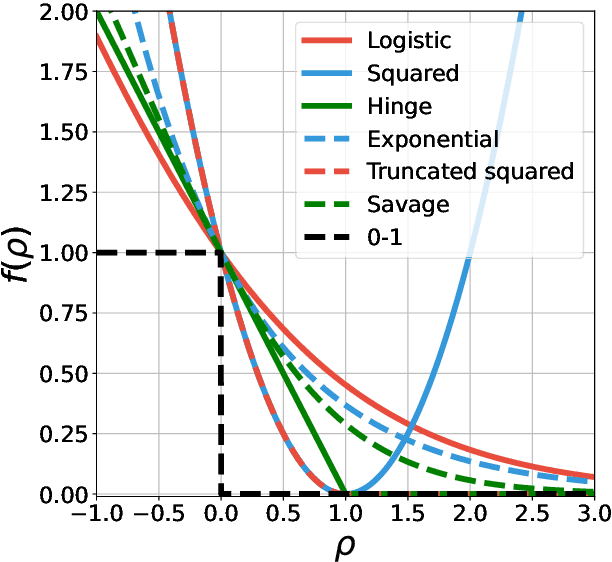
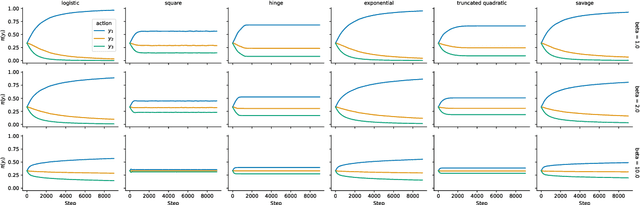
Offline preference optimization allows fine-tuning large models directly from offline data, and has proved effective in recent alignment practices. We propose generalized preference optimization (GPO), a family of offline losses parameterized by a general class of convex functions. GPO enables a unified view over preference optimization, encompassing existing algorithms such as DPO, IPO and SLiC as special cases, while naturally introducing new variants. The GPO framework also sheds light on how offline algorithms enforce regularization, through the design of the convex function that defines the loss. Our analysis and experiments reveal the connections and subtle differences between the offline regularization and the KL divergence regularization intended by the canonical RLHF formulation. In all, our results present new algorithmic toolkits and empirical insights to alignment practitioners.
Nash Learning from Human Feedback
Dec 06, 2023



Reinforcement learning from human feedback (RLHF) has emerged as the main paradigm for aligning large language models (LLMs) with human preferences. Typically, RLHF involves the initial step of learning a reward model from human feedback, often expressed as preferences between pairs of text generations produced by a pre-trained LLM. Subsequently, the LLM's policy is fine-tuned by optimizing it to maximize the reward model through a reinforcement learning algorithm. However, an inherent limitation of current reward models is their inability to fully represent the richness of human preferences and their dependency on the sampling distribution. In this study, we introduce an alternative pipeline for the fine-tuning of LLMs using pairwise human feedback. Our approach entails the initial learning of a preference model, which is conditioned on two inputs given a prompt, followed by the pursuit of a policy that consistently generates responses preferred over those generated by any competing policy, thus defining the Nash equilibrium of this preference model. We term this approach Nash learning from human feedback (NLHF). In the context of a tabular policy representation, we present a novel algorithmic solution, Nash-MD, founded on the principles of mirror descent. This algorithm produces a sequence of policies, with the last iteration converging to the regularized Nash equilibrium. Additionally, we explore parametric representations of policies and introduce gradient descent algorithms for deep-learning architectures. To demonstrate the effectiveness of our approach, we present experimental results involving the fine-tuning of a LLM for a text summarization task. We believe NLHF offers a compelling avenue for preference learning and policy optimization with the potential of advancing the field of aligning LLMs with human preferences.
Representations and Exploration for Deep Reinforcement Learning using Singular Value Decomposition
May 02, 2023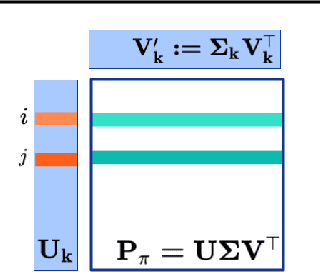
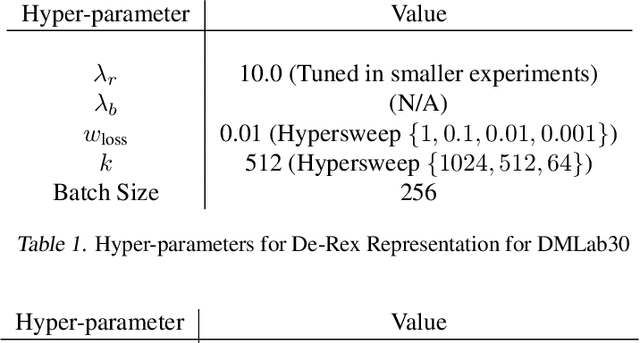
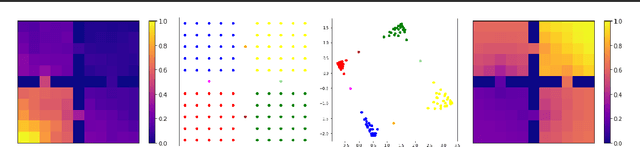

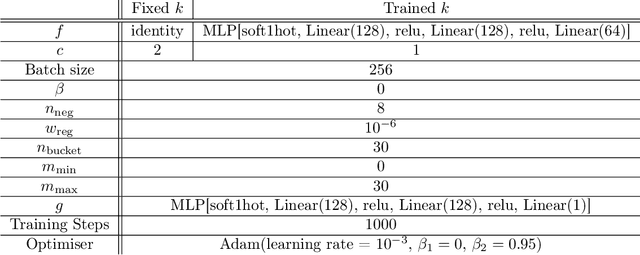
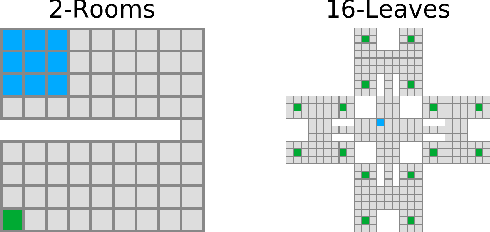
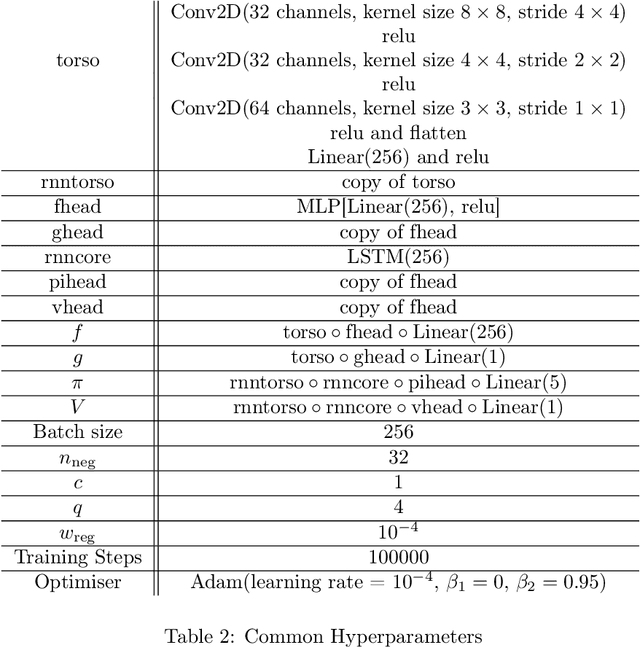
Representation learning and exploration are among the key challenges for any deep reinforcement learning agent. In this work, we provide a singular value decomposition based method that can be used to obtain representations that preserve the underlying transition structure in the domain. Perhaps interestingly, we show that these representations also capture the relative frequency of state visitations, thereby providing an estimate for pseudo-counts for free. To scale this decomposition method to large-scale domains, we provide an algorithm that never requires building the transition matrix, can make use of deep networks, and also permits mini-batch training. Further, we draw inspiration from predictive state representations and extend our decomposition method to partially observable environments. With experiments on multi-task settings with partially observable domains, we show that the proposed method can not only learn useful representation on DM-Lab-30 environments (that have inputs involving language instructions, pixel images, and rewards, among others) but it can also be effective at hard exploration tasks in DM-Hard-8 environments.
Understanding Self-Predictive Learning for Reinforcement Learning
Dec 06, 2022



We study the learning dynamics of self-predictive learning for reinforcement learning, a family of algorithms that learn representations by minimizing the prediction error of their own future latent representations. Despite its recent empirical success, such algorithms have an apparent defect: trivial representations (such as constants) minimize the prediction error, yet it is obviously undesirable to converge to such solutions. Our central insight is that careful designs of the optimization dynamics are critical to learning meaningful representations. We identify that a faster paced optimization of the predictor and semi-gradient updates on the representation, are crucial to preventing the representation collapse. Then in an idealized setup, we show self-predictive learning dynamics carries out spectral decomposition on the state transition matrix, effectively capturing information of the transition dynamics. Building on the theoretical insights, we propose bidirectional self-predictive learning, a novel self-predictive algorithm that learns two representations simultaneously. We examine the robustness of our theoretical insights with a number of small-scale experiments and showcase the promise of the novel representation learning algorithm with large-scale experiments.
BYOL-Explore: Exploration by Bootstrapped Prediction
Jun 16, 2022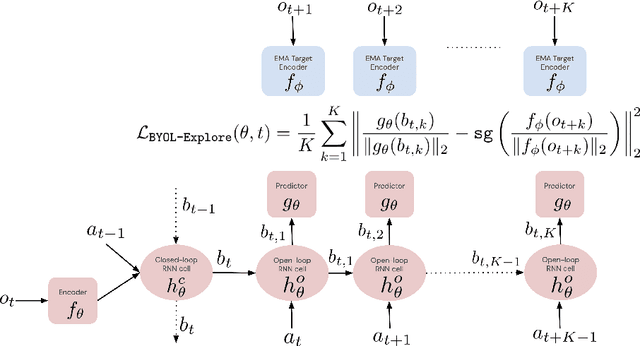
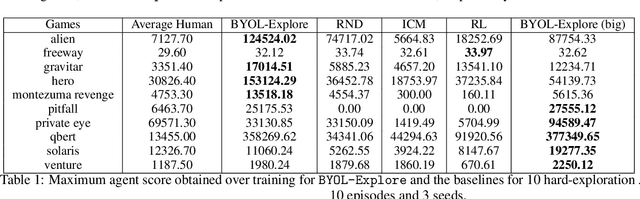
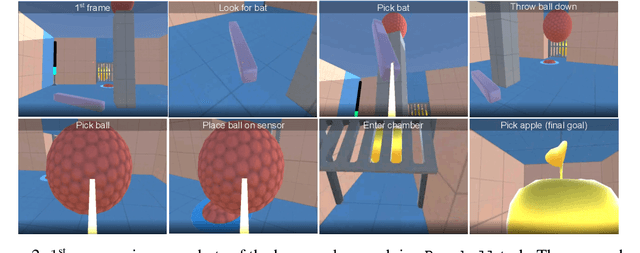
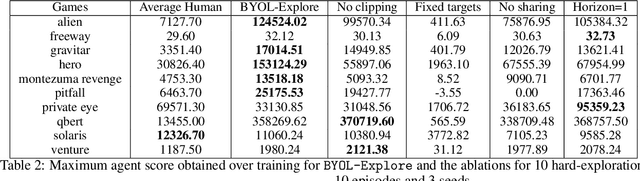
We present BYOL-Explore, a conceptually simple yet general approach for curiosity-driven exploration in visually-complex environments. BYOL-Explore learns a world representation, the world dynamics, and an exploration policy all-together by optimizing a single prediction loss in the latent space with no additional auxiliary objective. We show that BYOL-Explore is effective in DM-HARD-8, a challenging partially-observable continuous-action hard-exploration benchmark with visually-rich 3-D environments. On this benchmark, we solve the majority of the tasks purely through augmenting the extrinsic reward with BYOL-Explore s intrinsic reward, whereas prior work could only get off the ground with human demonstrations. As further evidence of the generality of BYOL-Explore, we show that it achieves superhuman performance on the ten hardest exploration games in Atari while having a much simpler design than other competitive agents.
Geometric Entropic Exploration
Jan 07, 2021
Exploration is essential for solving complex Reinforcement Learning (RL) tasks. Maximum State-Visitation Entropy (MSVE) formulates the exploration problem as a well-defined policy optimization problem whose solution aims at visiting all states as uniformly as possible. This is in contrast to standard uncertainty-based approaches where exploration is transient and eventually vanishes. However, existing approaches to MSVE are theoretically justified only for discrete state-spaces as they are oblivious to the geometry of continuous domains. We address this challenge by introducing Geometric Entropy Maximisation (GEM), a new algorithm that maximises the geometry-aware Shannon entropy of state-visits in both discrete and continuous domains. Our key theoretical contribution is casting geometry-aware MSVE exploration as a tractable problem of optimising a simple and novel noise-contrastive objective function. In our experiments, we show the efficiency of GEM in solving several RL problems with sparse rewards, compared against other deep RL exploration approaches.
Bootstrap Your Own Latent: A New Approach to Self-Supervised Learning
Jun 13, 2020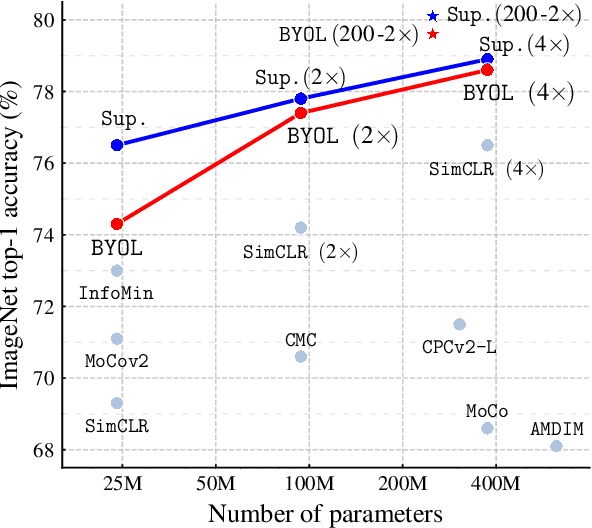
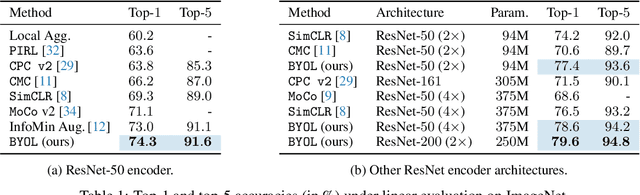
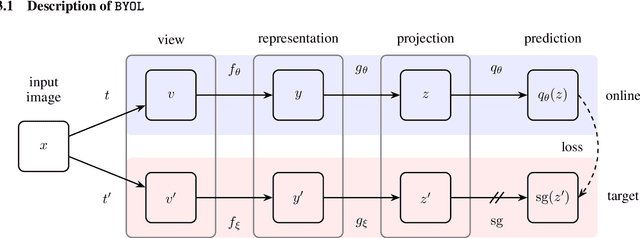
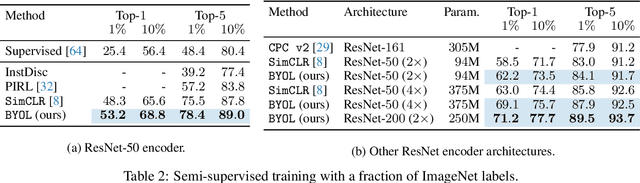
We introduce Bootstrap Your Own Latent (BYOL), a new approach to self-supervised image representation learning. BYOL relies on two neural networks, referred to as online and target networks, that interact and learn from each other. From an augmented view of an image, we train the online network to predict the target network representation of the same image under a different augmented view. At the same time, we update the target network with a slow-moving average of the online network. While state-of-the art methods intrinsically rely on negative pairs, BYOL achieves a new state of the art without them. BYOL reaches $74.3\%$ top-1 classification accuracy on ImageNet using the standard linear evaluation protocol with a ResNet-50 architecture and $79.6\%$ with a larger ResNet. We show that BYOL performs on par or better than the current state of the art on both transfer and semi-supervised benchmarks.
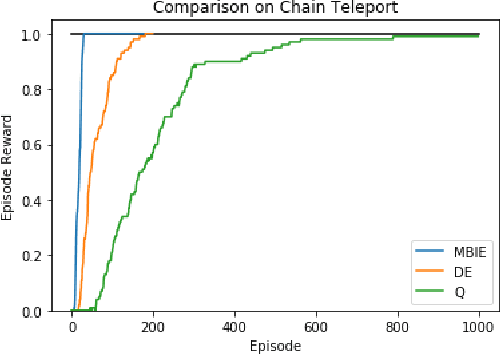
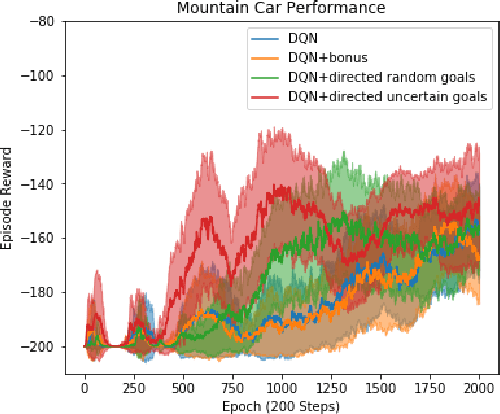
Directed Exploration for Reinforcement Learning
Jun 18, 2019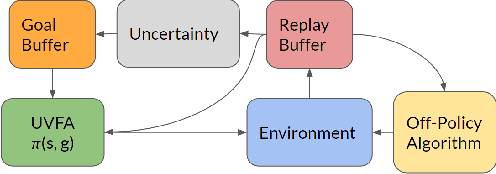
Efficient exploration is necessary to achieve good sample efficiency for reinforcement learning in general. From small, tabular settings such as gridworlds to large, continuous and sparse reward settings such as robotic object manipulation tasks, exploration through adding an uncertainty bonus to the reward function has been shown to be effective when the uncertainty is able to accurately drive exploration towards promising states. However reward bonuses can still be inefficient since they are non-stationary, which means that we must wait for function approximators to catch up and converge again when uncertainties change. We propose the idea of directed exploration, that is learning a goal-conditioned policy where goals are simply other states, and using that to directly try to reach states with large uncertainty. The goal-conditioned policy is independent of uncertainty and is thus stationary. We show in our experiments how directed exploration is more efficient at exploration and more robust to how the uncertainty is computed than adding bonuses to rewards.