 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRepresentation Learning via Non-Contrastive Mutual Information
Apr 23, 2025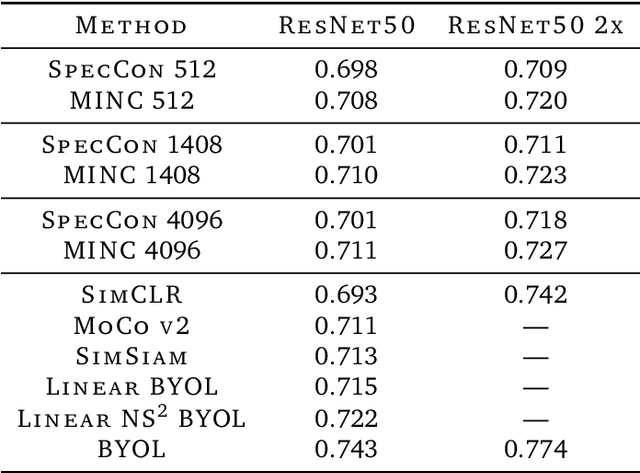
Labeling data is often very time consuming and expensive, leaving us with a majority of unlabeled data. Self-supervised representation learning methods such as SimCLR (Chen et al., 2020) or BYOL (Grill et al., 2020) have been very successful at learning meaningful latent representations from unlabeled image data, resulting in much more general and transferable representations for downstream tasks. Broadly, self-supervised methods fall into two types: 1) Contrastive methods, such as SimCLR; and 2) Non-Contrastive methods, such as BYOL. Contrastive methods are generally trying to maximize mutual information between related data points, so they need to compare every data point to every other data point, resulting in high variance, and thus requiring large batch sizes to work well. Non-contrastive methods like BYOL have much lower variance as they do not need to make pairwise comparisons, but are much trickier to implement as they have the possibility of collapsing to a constant vector. In this paper, we aim to develop a self-supervised objective that combines the strength of both types. We start with a particular contrastive method called the Spectral Contrastive Loss (HaoChen et al., 2021; Lu et al., 2024), and we convert it into a more general non-contrastive form; this removes the pairwise comparisons resulting in lower variance, but keeps the mutual information formulation of the contrastive method preventing collapse. We call our new objective the Mutual Information Non-Contrastive (MINC) loss. We test MINC by learning image representations on ImageNet (similar to SimCLR and BYOL) and show that it consistently improves upon the Spectral Contrastive loss baseline.
A Unifying Framework for Action-Conditional Self-Predictive Reinforcement Learning
Jun 04, 2024



Learning a good representation is a crucial challenge for Reinforcement Learning (RL) agents. Self-predictive learning provides means to jointly learn a latent representation and dynamics model by bootstrapping from future latent representations (BYOL). Recent work has developed theoretical insights into these algorithms by studying a continuous-time ODE model for self-predictive representation learning under the simplifying assumption that the algorithm depends on a fixed policy (BYOL-$\Pi$); this assumption is at odds with practical instantiations of such algorithms, which explicitly condition their predictions on future actions. In this work, we take a step towards bridging the gap between theory and practice by analyzing an action-conditional self-predictive objective (BYOL-AC) using the ODE framework, characterizing its convergence properties and highlighting important distinctions between the limiting solutions of the BYOL-$\Pi$ and BYOL-AC dynamics. We show how the two representations are related by a variance equation. This connection leads to a novel variance-like action-conditional objective (BYOL-VAR) and its corresponding ODE. We unify the study of all three objectives through two complementary lenses; a model-based perspective, where each objective is shown to be equivalent to a low-rank approximation of certain dynamics, and a model-free perspective, which establishes relationships between the objectives and their respective value, Q-value, and advantage function. Our empirical investigations, encompassing both linear function approximation and Deep RL environments, demonstrates that BYOL-AC is better overall in a variety of different settings.
Offline Regularised Reinforcement Learning for Large Language Models Alignment
May 29, 2024The dominant framework for alignment of large language models (LLM), whether through reinforcement learning from human feedback or direct preference optimisation, is to learn from preference data. This involves building datasets where each element is a quadruplet composed of a prompt, two independent responses (completions of the prompt) and a human preference between the two independent responses, yielding a preferred and a dis-preferred response. Such data is typically scarce and expensive to collect. On the other hand, \emph{single-trajectory} datasets where each element is a triplet composed of a prompt, a response and a human feedback is naturally more abundant. The canonical element of such datasets is for instance an LLM's response to a user's prompt followed by a user's feedback such as a thumbs-up/down. Consequently, in this work, we propose DRO, or \emph{Direct Reward Optimisation}, as a framework and associated algorithms that do not require pairwise preferences. DRO uses a simple mean-squared objective that can be implemented in various ways. We validate our findings empirically, using T5 encoder-decoder language models, and show DRO's performance over selected baselines such as Kahneman-Tversky Optimization (KTO). Thus, we confirm that DRO is a simple and empirically compelling method for single-trajectory policy optimisation.
Human Alignment of Large Language Models through Online Preference Optimisation
Mar 13, 2024



Ensuring alignment of language models' outputs with human preferences is critical to guarantee a useful, safe, and pleasant user experience. Thus, human alignment has been extensively studied recently and several methods such as Reinforcement Learning from Human Feedback (RLHF), Direct Policy Optimisation (DPO) and Sequence Likelihood Calibration (SLiC) have emerged. In this paper, our contribution is two-fold. First, we show the equivalence between two recent alignment methods, namely Identity Policy Optimisation (IPO) and Nash Mirror Descent (Nash-MD). Second, we introduce a generalisation of IPO, named IPO-MD, that leverages the regularised sampling approach proposed by Nash-MD. This equivalence may seem surprising at first sight, since IPO is an offline method whereas Nash-MD is an online method using a preference model. However, this equivalence can be proven when we consider the online version of IPO, that is when both generations are sampled by the online policy and annotated by a trained preference model. Optimising the IPO loss with such a stream of data becomes then equivalent to finding the Nash equilibrium of the preference model through self-play. Building on this equivalence, we introduce the IPO-MD algorithm that generates data with a mixture policy (between the online and reference policy) similarly as the general Nash-MD algorithm. We compare online-IPO and IPO-MD to different online versions of existing losses on preference data such as DPO and SLiC on a summarisation task.
Understanding plasticity in neural networks
Mar 02, 2023
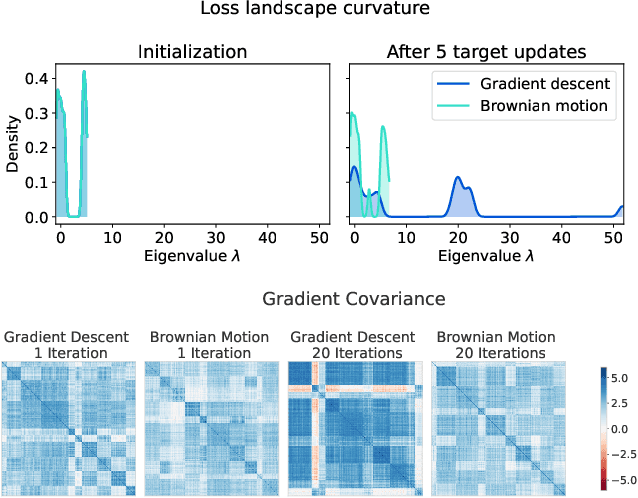
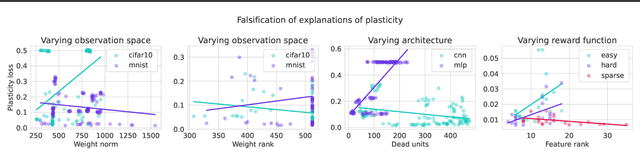

Plasticity, the ability of a neural network to quickly change its predictions in response to new information, is essential for the adaptability and robustness of deep reinforcement learning systems. Deep neural networks are known to lose plasticity over the course of training even in relatively simple learning problems, but the mechanisms driving this phenomenon are still poorly understood. This paper conducts a systematic empirical analysis into plasticity loss, with the goal of understanding the phenomenon mechanistically in order to guide the future development of targeted solutions. We find that loss of plasticity is deeply connected to changes in the curvature of the loss landscape, but that it typically occurs in the absence of saturated units or divergent gradient norms. Based on this insight, we identify a number of parameterization and optimization design choices which enable networks to better preserve plasticity over the course of training. We validate the utility of these findings in larger-scale learning problems by applying the best-performing intervention, layer normalization, to a deep RL agent trained on the Arcade Learning Environment.
Hierarchical Reinforcement Learning in Complex 3D Environments
Feb 28, 2023



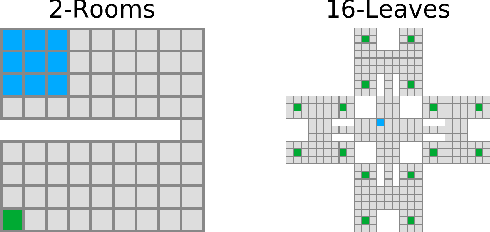
Hierarchical Reinforcement Learning (HRL) agents have the potential to demonstrate appealing capabilities such as planning and exploration with abstraction, transfer, and skill reuse. Recent successes with HRL across different domains provide evidence that practical, effective HRL agents are possible, even if existing agents do not yet fully realize the potential of HRL. Despite these successes, visually complex partially observable 3D environments remained a challenge for HRL agents. We address this issue with Hierarchical Hybrid Offline-Online (H2O2), a hierarchical deep reinforcement learning agent that discovers and learns to use options from scratch using its own experience. We show that H2O2 is competitive with a strong non-hierarchical Muesli baseline in the DeepMind Hard Eight tasks and we shed new light on the problem of learning hierarchical agents in complex environments. Our empirical study of H2O2 reveals previously unnoticed practical challenges and brings new perspective to the current understanding of hierarchical agents in complex domains.
BYOL-Explore: Exploration by Bootstrapped Prediction
Jun 16, 2022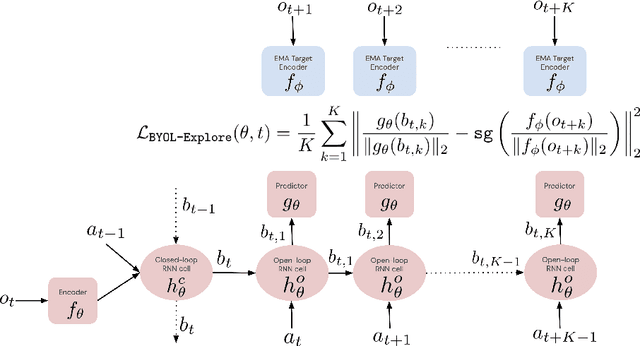
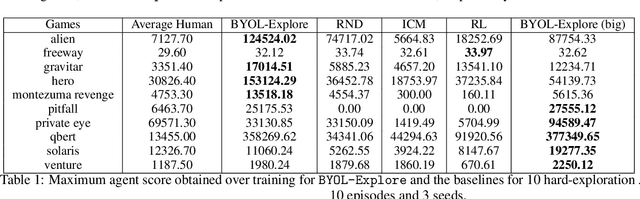
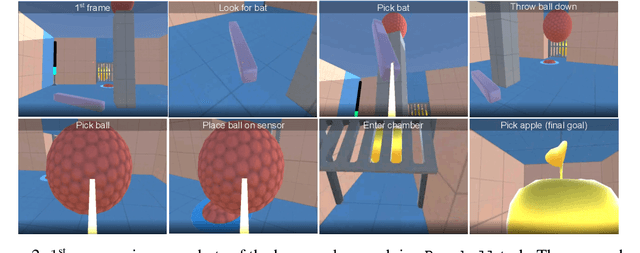
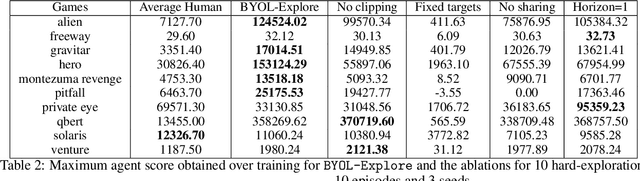
We present BYOL-Explore, a conceptually simple yet general approach for curiosity-driven exploration in visually-complex environments. BYOL-Explore learns a world representation, the world dynamics, and an exploration policy all-together by optimizing a single prediction loss in the latent space with no additional auxiliary objective. We show that BYOL-Explore is effective in DM-HARD-8, a challenging partially-observable continuous-action hard-exploration benchmark with visually-rich 3-D environments. On this benchmark, we solve the majority of the tasks purely through augmenting the extrinsic reward with BYOL-Explore s intrinsic reward, whereas prior work could only get off the ground with human demonstrations. As further evidence of the generality of BYOL-Explore, we show that it achieves superhuman performance on the ten hardest exploration games in Atari while having a much simpler design than other competitive agents.
Neural Recursive Belief States in Multi-Agent Reinforcement Learning
Feb 03, 2021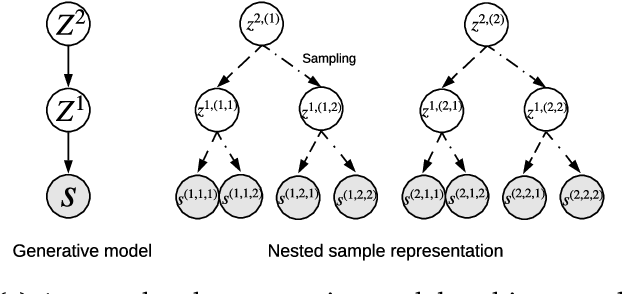
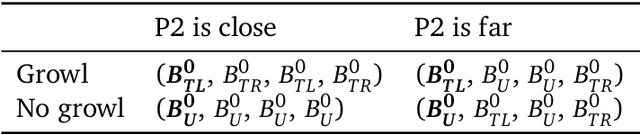
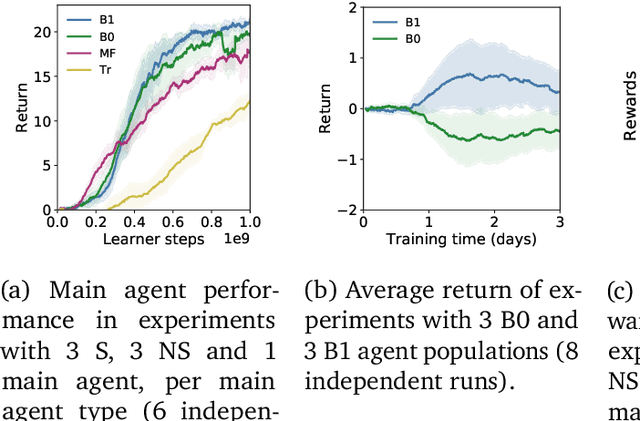
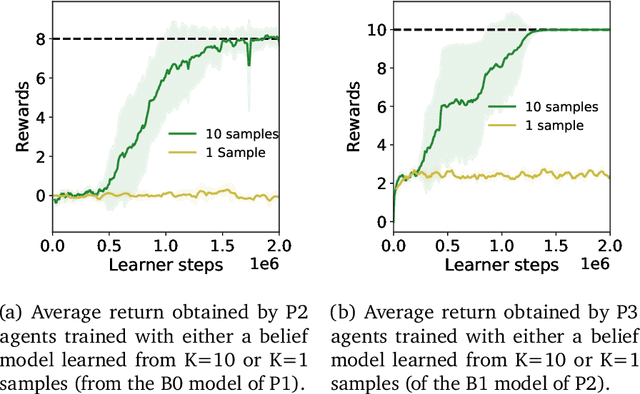
In multi-agent reinforcement learning, the problem of learning to act is particularly difficult because the policies of co-players may be heavily conditioned on information only observed by them. On the other hand, humans readily form beliefs about the knowledge possessed by their peers and leverage beliefs to inform decision-making. Such abilities underlie individual success in a wide range of Markov games, from bluffing in Poker to conditional cooperation in the Prisoner's Dilemma, to convention-building in Bridge. Classical methods are usually not applicable to complex domains due to the intractable nature of hierarchical beliefs (i.e. beliefs of other agents' beliefs). We propose a scalable method to approximate these belief structures using recursive deep generative models, and to use the belief models to obtain representations useful to acting in complex tasks. Our agents trained with belief models outperform model-free baselines with equivalent representational capacity using common training paradigms. We also show that higher-order belief models outperform agents with lower-order models.
Geometric Entropic Exploration
Jan 07, 2021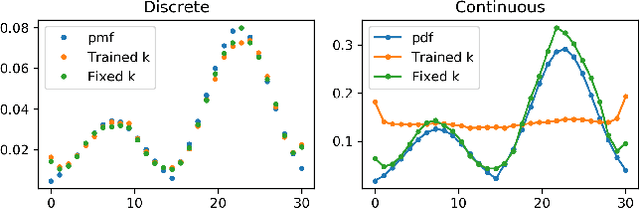
Exploration is essential for solving complex Reinforcement Learning (RL) tasks. Maximum State-Visitation Entropy (MSVE) formulates the exploration problem as a well-defined policy optimization problem whose solution aims at visiting all states as uniformly as possible. This is in contrast to standard uncertainty-based approaches where exploration is transient and eventually vanishes. However, existing approaches to MSVE are theoretically justified only for discrete state-spaces as they are oblivious to the geometry of continuous domains. We address this challenge by introducing Geometric Entropy Maximisation (GEM), a new algorithm that maximises the geometry-aware Shannon entropy of state-visits in both discrete and continuous domains. Our key theoretical contribution is casting geometry-aware MSVE exploration as a tractable problem of optimising a simple and novel noise-contrastive objective function. In our experiments, we show the efficiency of GEM in solving several RL problems with sparse rewards, compared against other deep RL exploration approaches.
Bootstrap Your Own Latent: A New Approach to Self-Supervised Learning
Jun 13, 2020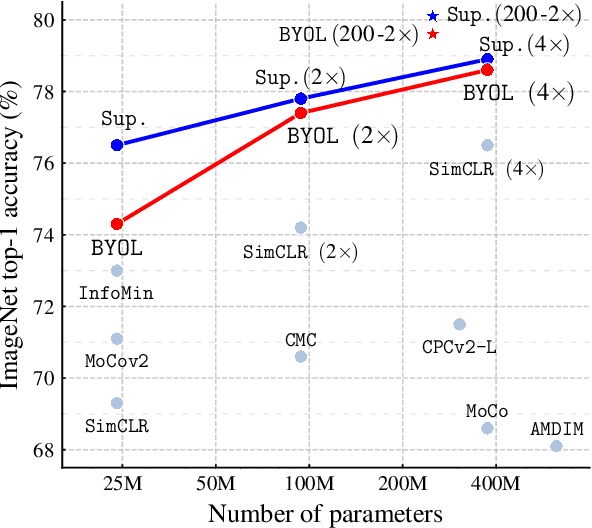
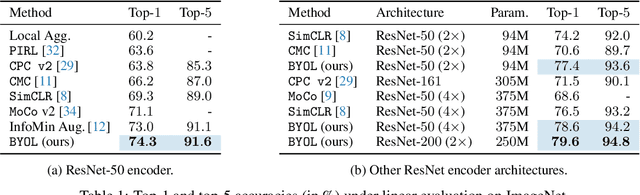
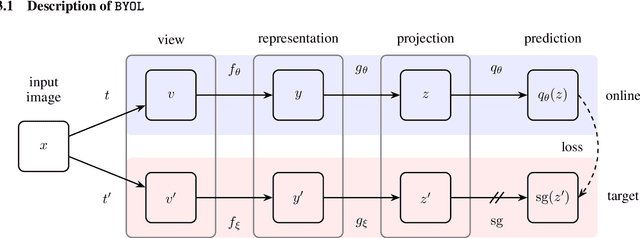
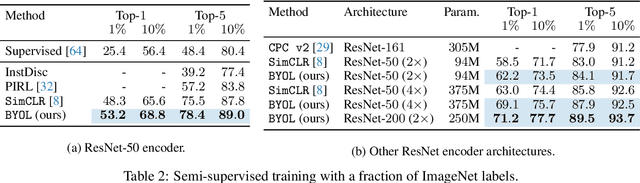
We introduce Bootstrap Your Own Latent (BYOL), a new approach to self-supervised image representation learning. BYOL relies on two neural networks, referred to as online and target networks, that interact and learn from each other. From an augmented view of an image, we train the online network to predict the target network representation of the same image under a different augmented view. At the same time, we update the target network with a slow-moving average of the online network. While state-of-the art methods intrinsically rely on negative pairs, BYOL achieves a new state of the art without them. BYOL reaches $74.3\%$ top-1 classification accuracy on ImageNet using the standard linear evaluation protocol with a ResNet-50 architecture and $79.6\%$ with a larger ResNet. We show that BYOL performs on par or better than the current state of the art on both transfer and semi-supervised benchmarks.