 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Endedness is Essential for Artificial Superhuman Intelligence
Jun 06, 2024


In recent years there has been a tremendous surge in the general capabilities of AI systems, mainly fuelled by training foundation models on internetscale data. Nevertheless, the creation of openended, ever self-improving AI remains elusive. In this position paper, we argue that the ingredients are now in place to achieve openendedness in AI systems with respect to a human observer. Furthermore, we claim that such open-endedness is an essential property of any artificial superhuman intelligence (ASI). We begin by providing a concrete formal definition of open-endedness through the lens of novelty and learnability. We then illustrate a path towards ASI via open-ended systems built on top of foundation models, capable of making novel, humanrelevant discoveries. We conclude by examining the safety implications of generally-capable openended AI. We expect that open-ended foundation models will prove to be an increasingly fertile and safety-critical area of research in the near future.
Many-Shot In-Context Learning
Apr 17, 2024



Large language models (LLMs) excel at few-shot in-context learning (ICL) -- learning from a few examples provided in context at inference, without any weight updates. Newly expanded context windows allow us to investigate ICL with hundreds or thousands of examples -- the many-shot regime. Going from few-shot to many-shot, we observe significant performance gains across a wide variety of generative and discriminative tasks. While promising, many-shot ICL can be bottlenecked by the available amount of human-generated examples. To mitigate this limitation, we explore two new settings: Reinforced and Unsupervised ICL. Reinforced ICL uses model-generated chain-of-thought rationales in place of human examples. Unsupervised ICL removes rationales from the prompt altogether, and prompts the model only with domain-specific questions. We find that both Reinforced and Unsupervised ICL can be quite effective in the many-shot regime, particularly on complex reasoning tasks. Finally, we demonstrate that, unlike few-shot learning, many-shot learning is effective at overriding pretraining biases and can learn high-dimensional functions with numerical inputs. Our analysis also reveals the limitations of next-token prediction loss as an indicator of downstream ICL performance.
Genie: Generative Interactive Environments
Feb 23, 2024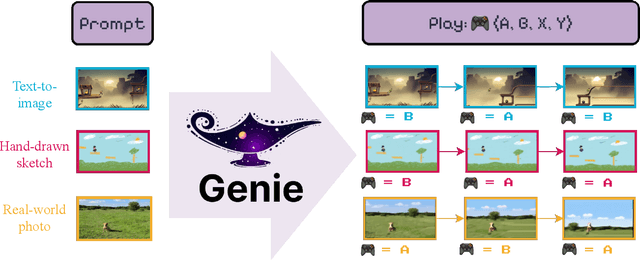
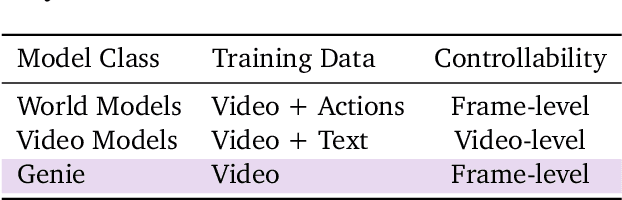
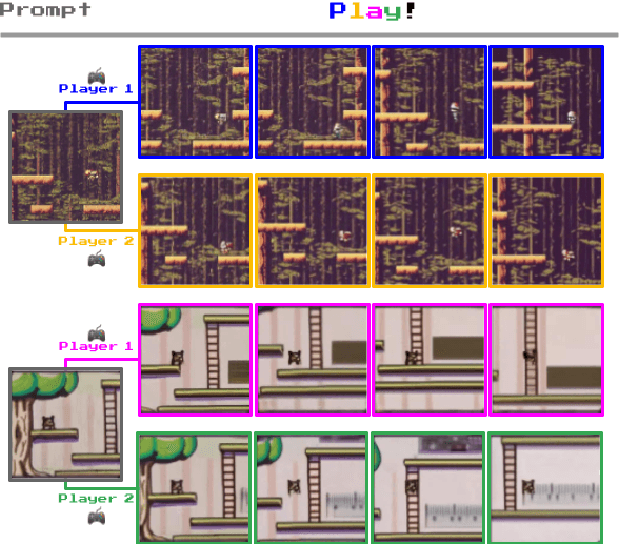
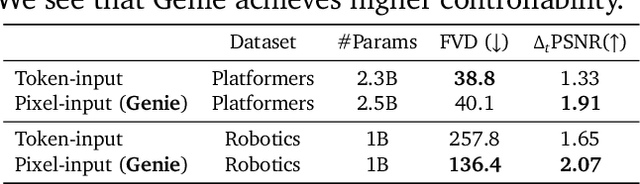
We introduce Genie, the first generative interactive environment trained in an unsupervised manner from unlabelled Internet videos. The model can be prompted to generate an endless variety of action-controllable virtual worlds described through text, synthetic images, photographs, and even sketches. At 11B parameters, Genie can be considered a foundation world model. It is comprised of a spatiotemporal video tokenizer, an autoregressive dynamics model, and a simple and scalable latent action model. Genie enables users to act in the generated environments on a frame-by-frame basis despite training without any ground-truth action labels or other domain-specific requirements typically found in the world model literature. Further the resulting learned latent action space facilitates training agents to imitate behaviors from unseen videos, opening the path for training generalist agents of the future.
Vision-Language Models as a Source of Rewards
Dec 14, 2023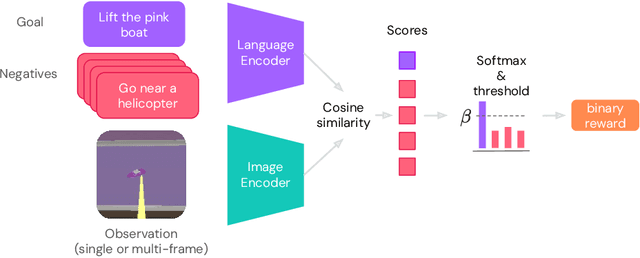
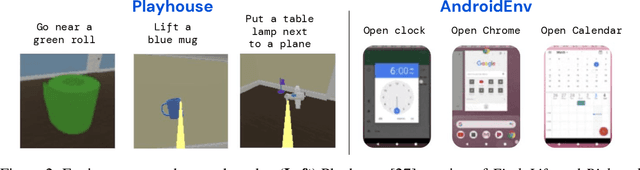
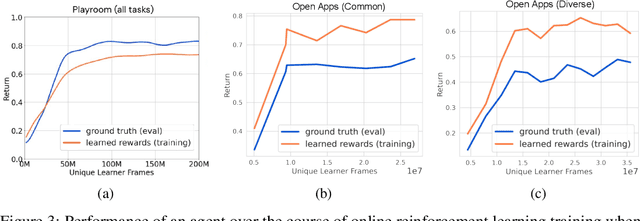
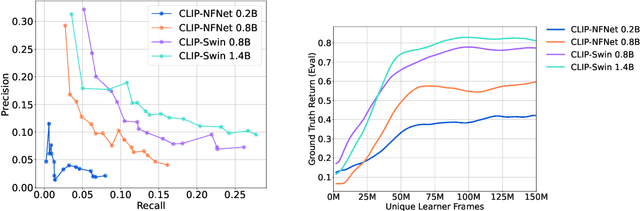
Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
Structured State Space Models for In-Context Reinforcement Learning
Mar 09, 2023



Structured state space sequence (S4) models have recently achieved state-of-the-art performance on long-range sequence modeling tasks. These models also have fast inference speeds and parallelisable training, making them potentially useful in many reinforcement learning settings. We propose a modification to a variant of S4 that enables us to initialise and reset the hidden state in parallel, allowing us to tackle reinforcement learning tasks. We show that our modified architecture runs asymptotically faster than Transformers and performs better than LSTM models on a simple memory-based task. Then, by leveraging the model's ability to handle long-range sequences, we achieve strong performance on a challenging meta-learning task in which the agent is given a randomly-sampled continuous control environment, combined with a randomly-sampled linear projection of the environment's observations and actions. Furthermore, we show the resulting model can adapt to out-of-distribution held-out tasks. Overall, the results presented in this paper suggest that the S4 models are a strong contender for the default architecture used for in-context reinforcement learning
Hierarchical Reinforcement Learning in Complex 3D Environments
Feb 28, 2023



Hierarchical Reinforcement Learning (HRL) agents have the potential to demonstrate appealing capabilities such as planning and exploration with abstraction, transfer, and skill reuse. Recent successes with HRL across different domains provide evidence that practical, effective HRL agents are possible, even if existing agents do not yet fully realize the potential of HRL. Despite these successes, visually complex partially observable 3D environments remained a challenge for HRL agents. We address this issue with Hierarchical Hybrid Offline-Online (H2O2), a hierarchical deep reinforcement learning agent that discovers and learns to use options from scratch using its own experience. We show that H2O2 is competitive with a strong non-hierarchical Muesli baseline in the DeepMind Hard Eight tasks and we shed new light on the problem of learning hierarchical agents in complex environments. Our empirical study of H2O2 reveals previously unnoticed practical challenges and brings new perspective to the current understanding of hierarchical agents in complex domains.
Human-Timescale Adaptation in an Open-Ended Task Space
Jan 18, 2023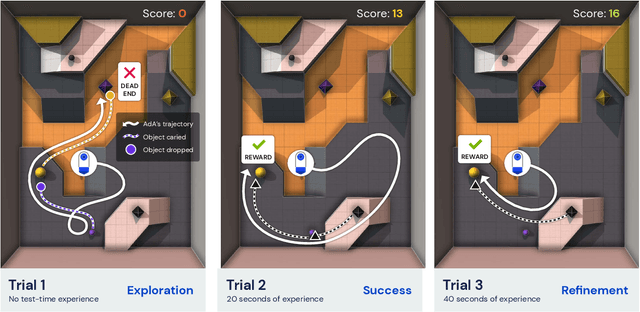
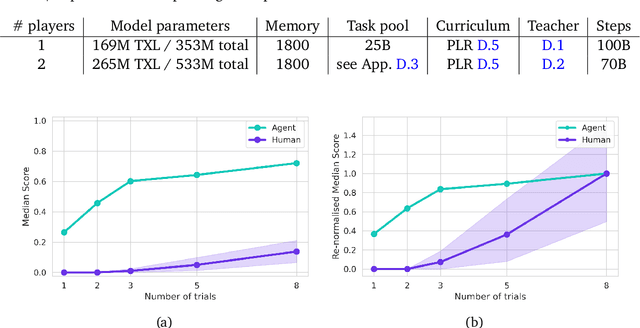
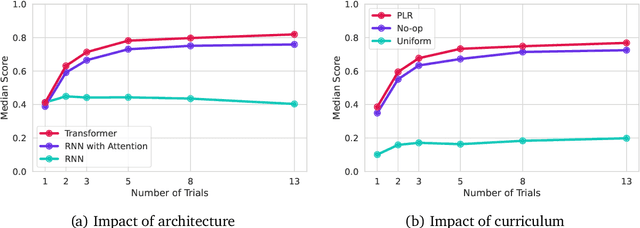
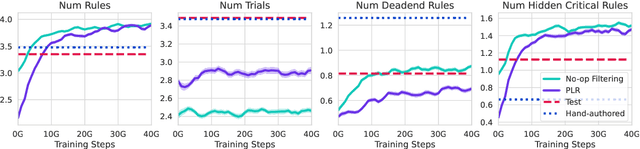
Foundation models have shown impressive adaptation and scalability in supervised and self-supervised learning problems, but so far these successes have not fully translated to reinforcement learning (RL). In this work, we demonstrate that training an RL agent at scale leads to a general in-context learning algorithm that can adapt to open-ended novel embodied 3D problems as quickly as humans. In a vast space of held-out environment dynamics, our adaptive agent (AdA) displays on-the-fly hypothesis-driven exploration, efficient exploitation of acquired knowledge, and can successfully be prompted with first-person demonstrations. Adaptation emerges from three ingredients: (1) meta-reinforcement learning across a vast, smooth and diverse task distribution, (2) a policy parameterised as a large-scale attention-based memory architecture, and (3) an effective automated curriculum that prioritises tasks at the frontier of an agent's capabilities. We demonstrate characteristic scaling laws with respect to network size, memory length, and richness of the training task distribution. We believe our results lay the foundation for increasingly general and adaptive RL agents that perform well across ever-larger open-ended domains.
Discovering Policies with DOMiNO: Diversity Optimization Maintaining Near Optimality
May 26, 2022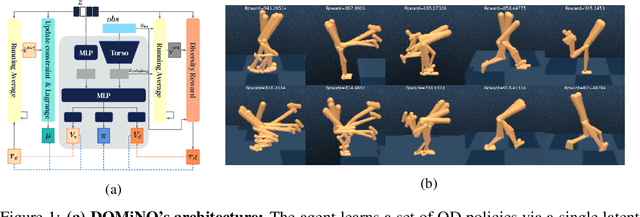
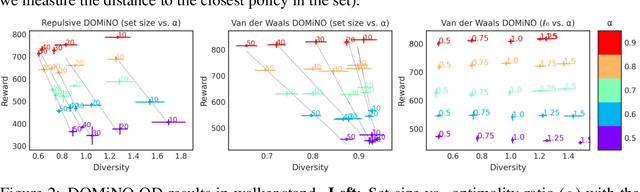
Finding different solutions to the same problem is a key aspect of intelligence associated with creativity and adaptation to novel situations. In reinforcement learning, a set of diverse policies can be useful for exploration, transfer, hierarchy, and robustness. We propose DOMiNO, a method for Diversity Optimization Maintaining Near Optimality. We formalize the problem as a Constrained Markov Decision Process where the objective is to find diverse policies, measured by the distance between the state occupancies of the policies in the set, while remaining near-optimal with respect to the extrinsic reward. We demonstrate that the method can discover diverse and meaningful behaviors in various domains, such as different locomotion patterns in the DeepMind Control Suite. We perform extensive analysis of our approach, compare it with other multi-objective baselines, demonstrate that we can control both the quality and the diversity of the set via interpretable hyperparameters, and show that the discovered set is robust to perturbations.
Model-Value Inconsistency as a Signal for Epistemic Uncertainty
Dec 08, 2021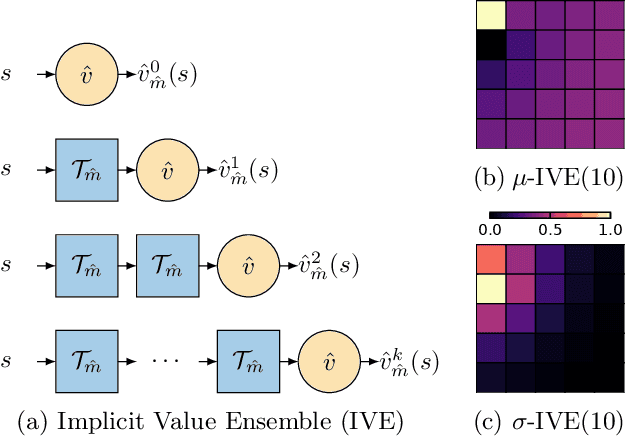
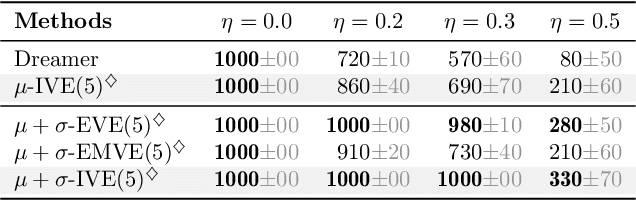
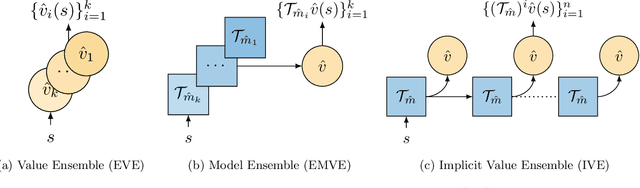
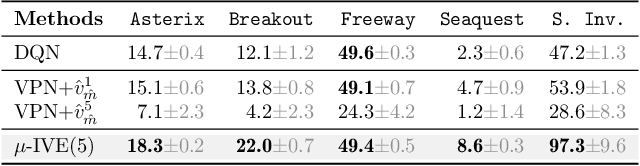
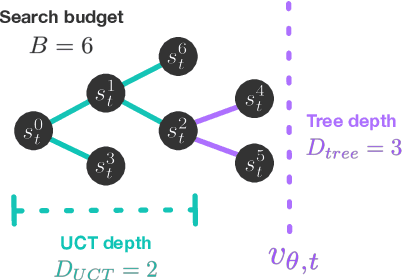
Using a model of the environment and a value function, an agent can construct many estimates of a state's value, by unrolling the model for different lengths and bootstrapping with its value function. Our key insight is that one can treat this set of value estimates as a type of ensemble, which we call an \emph{implicit value ensemble} (IVE). Consequently, the discrepancy between these estimates can be used as a proxy for the agent's epistemic uncertainty; we term this signal \emph{model-value inconsistency} or \emph{self-inconsistency} for short. Unlike prior work which estimates uncertainty by training an ensemble of many models and/or value functions, this approach requires only the single model and value function which are already being learned in most model-based reinforcement learning algorithms. We provide empirical evidence in both tabular and function approximation settings from pixels that self-inconsistency is useful (i) as a signal for exploration, (ii) for acting safely under distribution shifts, and (iii) for robustifying value-based planning with a model.
On the role of planning in model-based deep reinforcement learning
Nov 08, 2020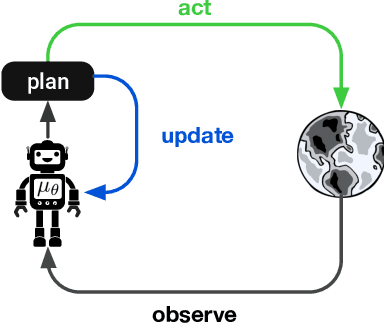
Model-based planning is often thought to be necessary for deep, careful reasoning and generalization in artificial agents. While recent successes of model-based reinforcement learning (MBRL) with deep function approximation have strengthened this hypothesis, the resulting diversity of model-based methods has also made it difficult to track which components drive success and why. In this paper, we seek to disentangle the contributions of recent methods by focusing on three questions: (1) How does planning benefit MBRL agents? (2) Within planning, what choices drive performance? (3) To what extent does planning improve generalization? To answer these questions, we study the performance of MuZero (Schrittwieser et al., 2019), a state-of-the-art MBRL algorithm, under a number of interventions and ablations and across a wide range of environments including control tasks, Atari, and 9x9 Go. Our results suggest the following: (1) The primary benefit of planning is in driving policy learning. (2) Using shallow trees with simple Monte-Carlo rollouts is as performant as more complex methods, except in the most difficult reasoning tasks. (3) Planning alone is insufficient to drive strong generalization. These results indicate where and how to utilize planning in reinforcement learning settings, and highlight a number of open questions for future MBRL research.