 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Language Models as a Source of Rewards
Dec 14, 2023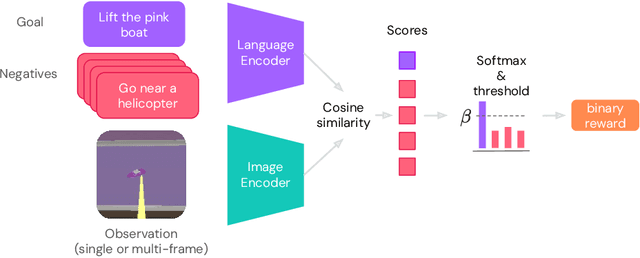
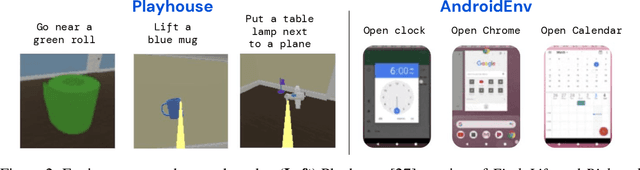
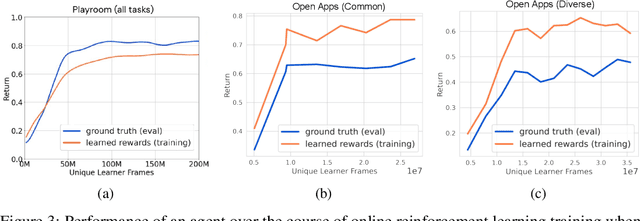
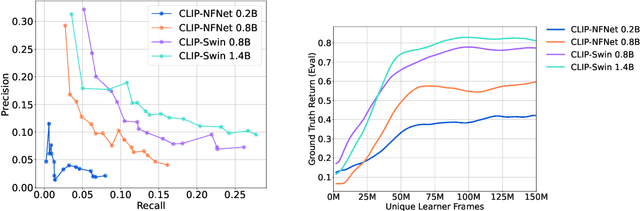
Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
Finding Increasingly Large Extremal Graphs with AlphaZero and Tabu Search
Nov 06, 2023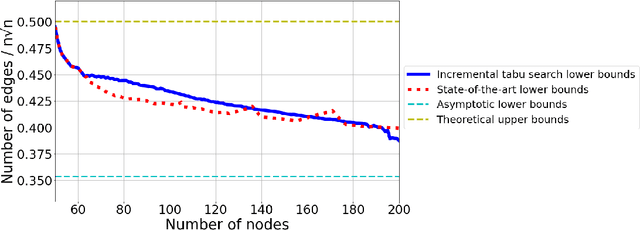
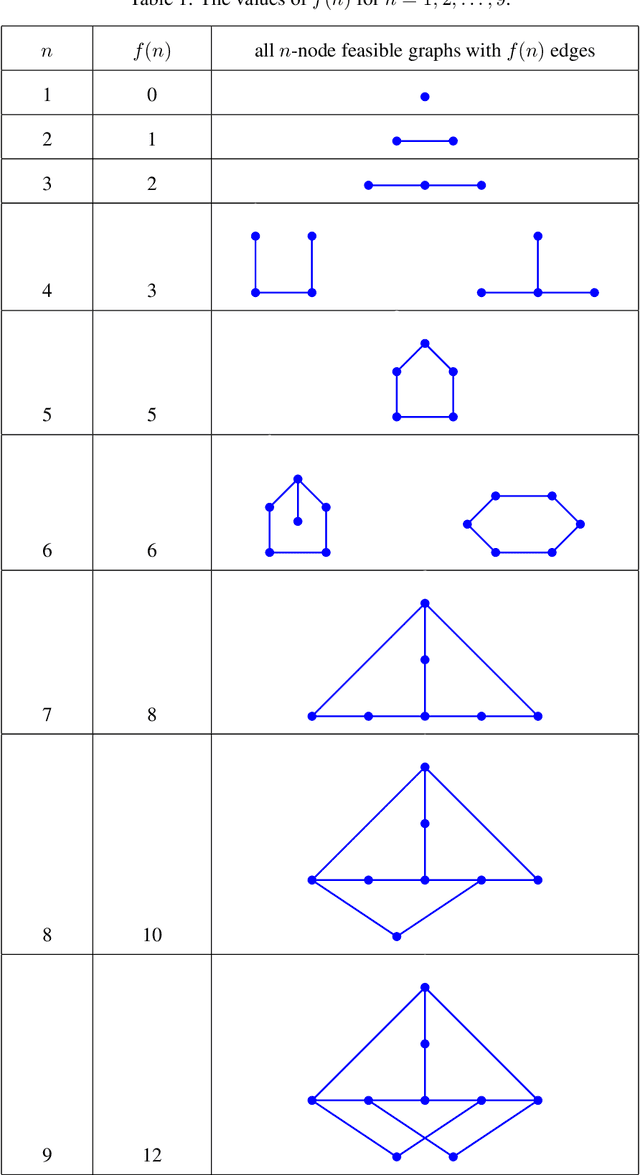
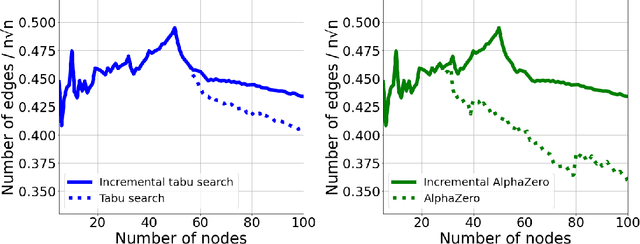
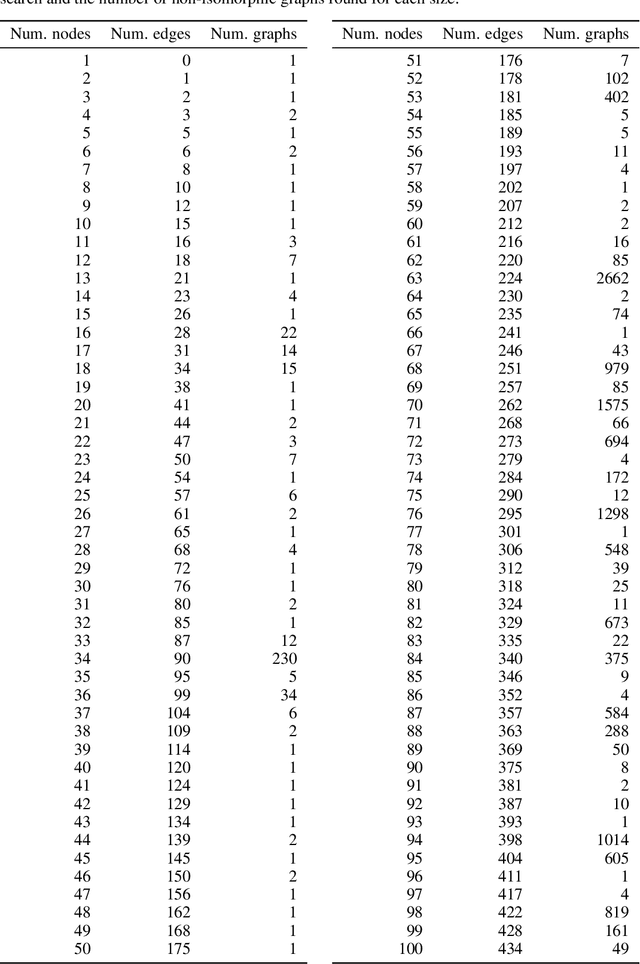
This work studies a central extremal graph theory problem inspired by a 1975 conjecture of Erd\H{o}s, which aims to find graphs with a given size (number of nodes) that maximize the number of edges without having 3- or 4-cycles. We formulate this problem as a sequential decision-making problem and compare AlphaZero, a neural network-guided tree search, with tabu search, a heuristic local search method. Using either method, by introducing a curriculum -- jump-starting the search for larger graphs using good graphs found at smaller sizes -- we improve the state-of-the-art lower bounds for several sizes. We also propose a flexible graph-generation environment and a permutation-invariant network architecture for learning to search in the space of graphs.
Learning how to Interact with a Complex Interface using Hierarchical Reinforcement Learning
Apr 21, 2022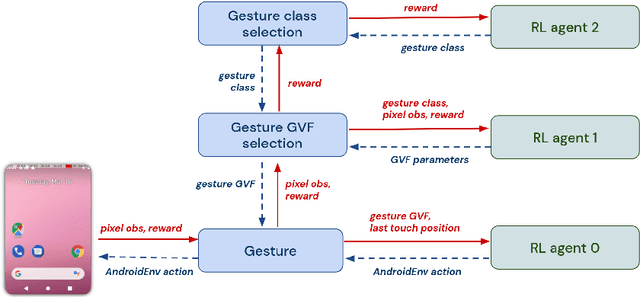
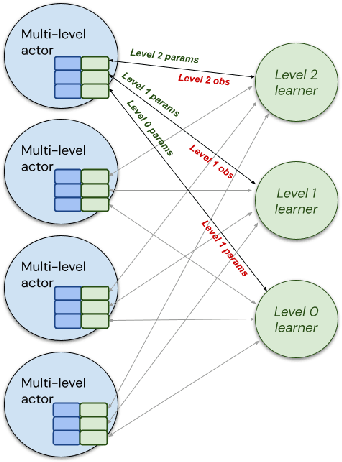
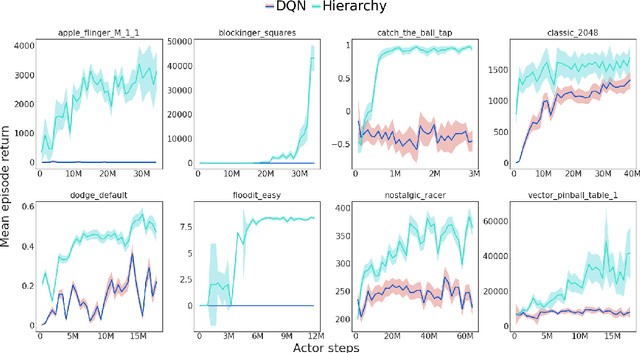
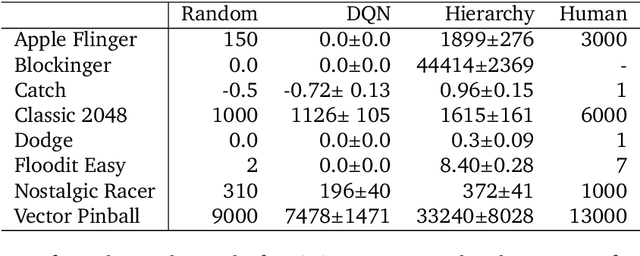
Hierarchical Reinforcement Learning (HRL) allows interactive agents to decompose complex problems into a hierarchy of sub-tasks. Higher-level tasks can invoke the solutions of lower-level tasks as if they were primitive actions. In this work, we study the utility of hierarchical decompositions for learning an appropriate way to interact with a complex interface. Specifically, we train HRL agents that can interface with applications in a simulated Android device. We introduce a Hierarchical Distributed Deep Reinforcement Learning architecture that learns (1) subtasks corresponding to simple finger gestures, and (2) how to combine these gestures to solve several Android tasks. Our approach relies on goal conditioning and can be used more generally to convert any base RL agent into an HRL agent. We use the AndroidEnv environment to evaluate our approach. For the experiments, the HRL agent uses a distributed version of the popular DQN algorithm to train different components of the hierarchy. While the native action space is completely intractable for simple DQN agents, our architecture can be used to establish an effective way to interact with different tasks, significantly improving the performance of the same DQN agent over different levels of abstraction.
Temporally Abstract Partial Models
Aug 06, 2021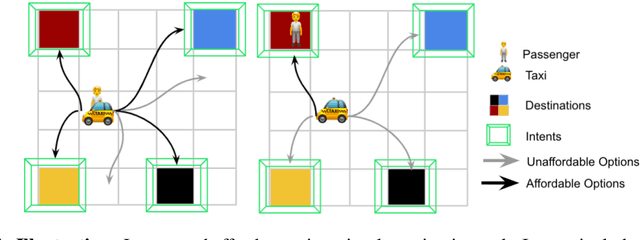

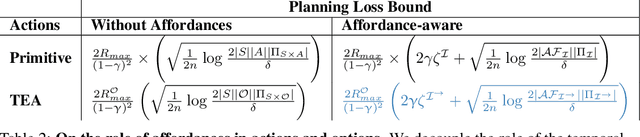
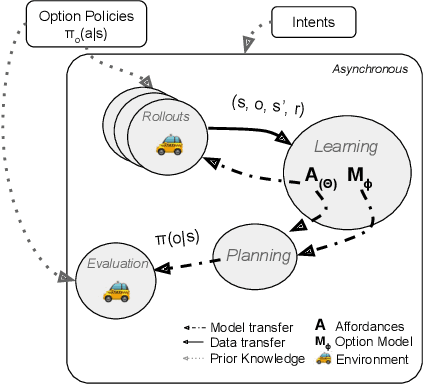
Humans and animals have the ability to reason and make predictions about different courses of action at many time scales. In reinforcement learning, option models (Sutton, Precup \& Singh, 1999; Precup, 2000) provide the framework for this kind of temporally abstract prediction and reasoning. Natural intelligent agents are also able to focus their attention on courses of action that are relevant or feasible in a given situation, sometimes termed affordable actions. In this paper, we define a notion of affordances for options, and develop temporally abstract partial option models, that take into account the fact that an option might be affordable only in certain situations. We analyze the trade-offs between estimation and approximation error in planning and learning when using such models, and identify some interesting special cases. Additionally, we demonstrate empirically the potential impact of partial option models on the efficiency of planning.
The Option Keyboard: Combining Skills in Reinforcement Learning
Jun 24, 2021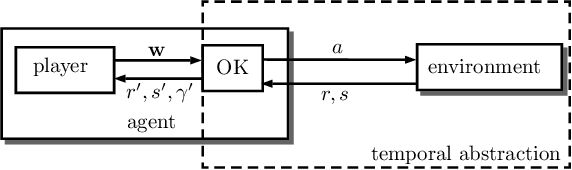
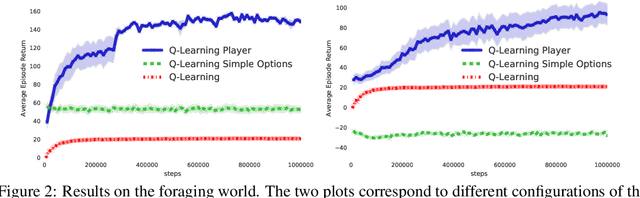
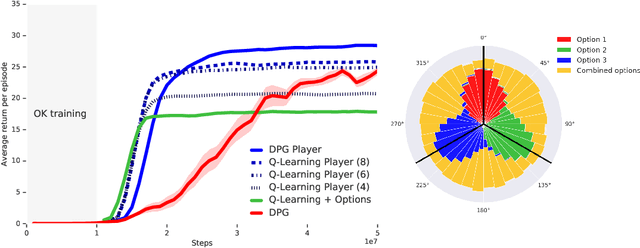
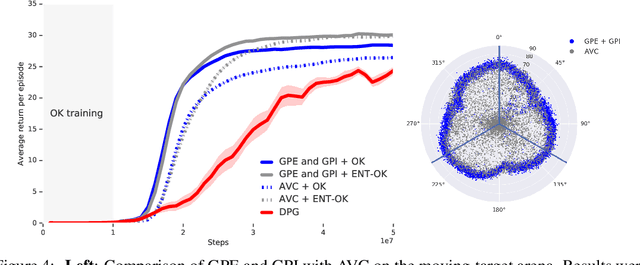
The ability to combine known skills to create new ones may be crucial in the solution of complex reinforcement learning problems that unfold over extended periods. We argue that a robust way of combining skills is to define and manipulate them in the space of pseudo-rewards (or "cumulants"). Based on this premise, we propose a framework for combining skills using the formalism of options. We show that every deterministic option can be unambiguously represented as a cumulant defined in an extended domain. Building on this insight and on previous results on transfer learning, we show how to approximate options whose cumulants are linear combinations of the cumulants of known options. This means that, once we have learned options associated with a set of cumulants, we can instantaneously synthesise options induced by any linear combination of them, without any learning involved. We describe how this framework provides a hierarchical interface to the environment whose abstract actions correspond to combinations of basic skills. We demonstrate the practical benefits of our approach in a resource management problem and a navigation task involving a quadrupedal simulated robot.
AndroidEnv: A Reinforcement Learning Platform for Android
May 27, 2021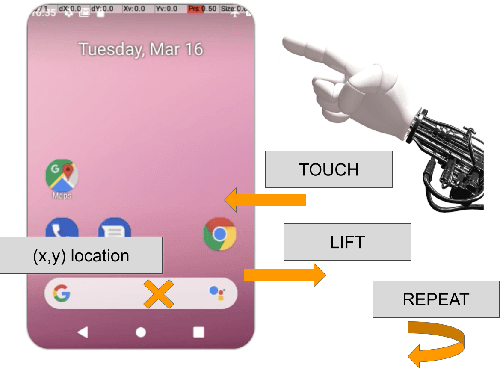
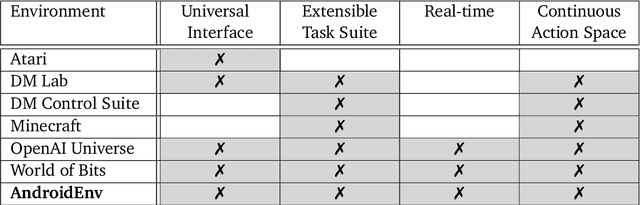
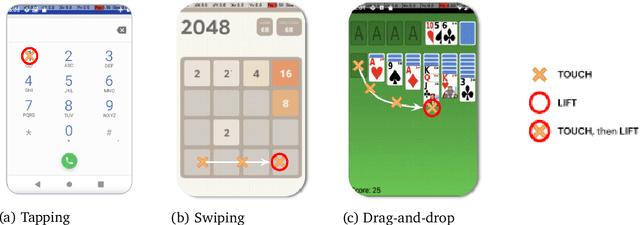
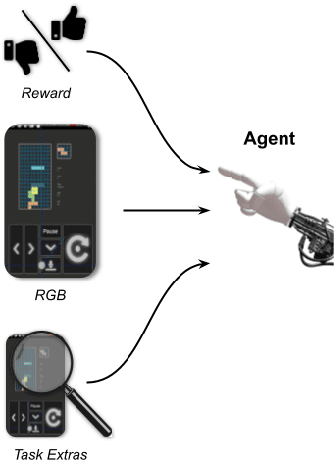
We introduce AndroidEnv, an open-source platform for Reinforcement Learning (RL) research built on top of the Android ecosystem. AndroidEnv allows RL agents to interact with a wide variety of apps and services commonly used by humans through a universal touchscreen interface. Since agents train on a realistic simulation of an Android device, they have the potential to be deployed on real devices. In this report, we give an overview of the environment, highlighting the significant features it provides for research, and we present an empirical evaluation of some popular reinforcement learning agents on a set of tasks built on this platform.
What can I do here? A Theory of Affordances in Reinforcement Learning
Jun 26, 2020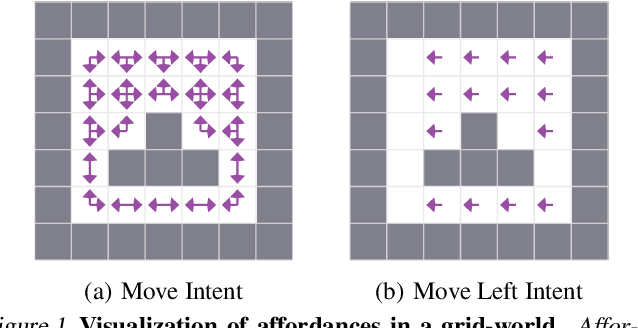
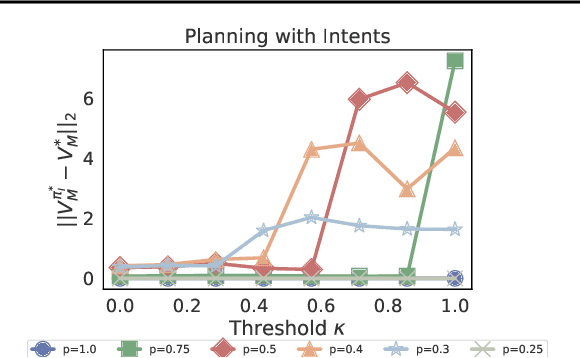
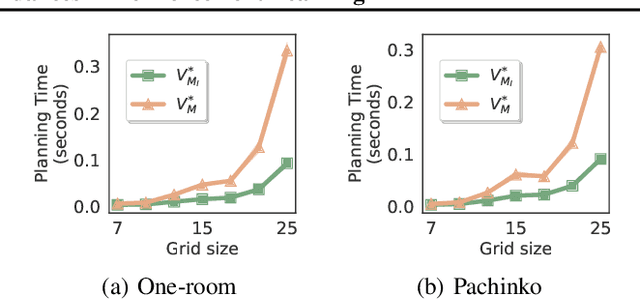
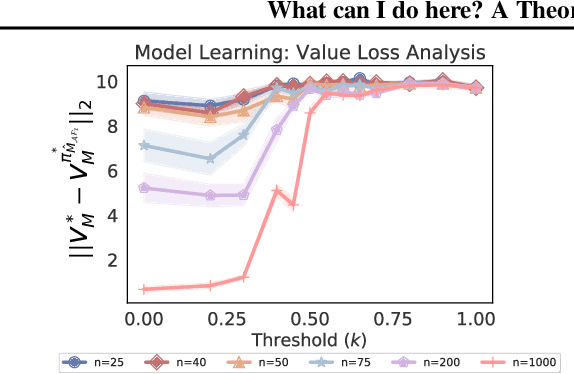
Reinforcement learning algorithms usually assume that all actions are always available to an agent. However, both people and animals understand the general link between the features of their environment and the actions that are feasible. Gibson (1977) coined the term "affordances" to describe the fact that certain states enable an agent to do certain actions, in the context of embodied agents. In this paper, we develop a theory of affordances for agents who learn and plan in Markov Decision Processes. Affordances play a dual role in this case. On one hand, they allow faster planning, by reducing the number of actions available in any given situation. On the other hand, they facilitate more efficient and precise learning of transition models from data, especially when such models require function approximation. We establish these properties through theoretical results as well as illustrative examples. We also propose an approach to learn affordances and use it to estimate transition models that are simpler and generalize better.