 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma: Open Models Based on Gemini Research and Technology
Mar 13, 2024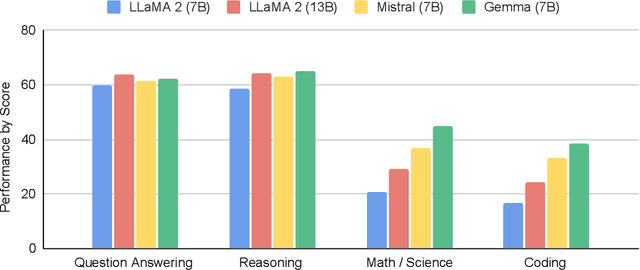
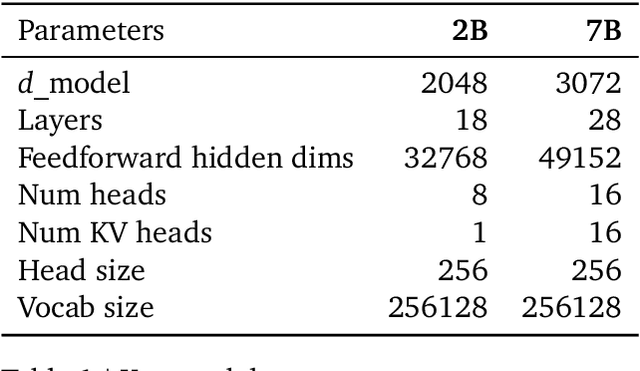
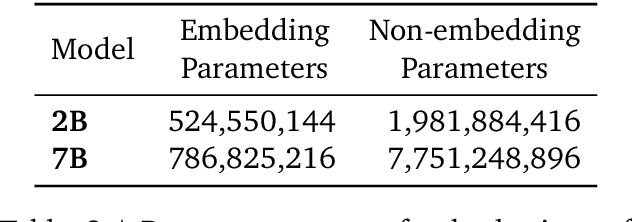
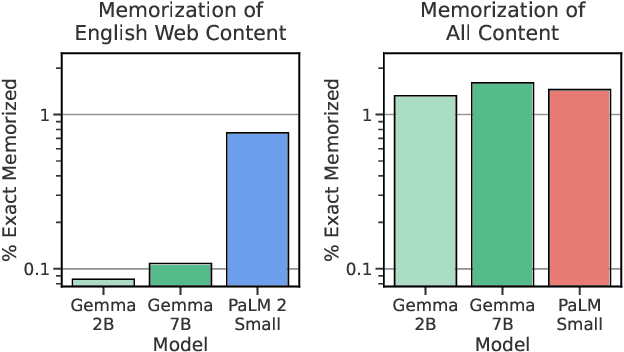
This work introduces Gemma, a family of lightweight, state-of-the art open models built from the research and technology used to create Gemini models. Gemma models demonstrate strong performance across academic benchmarks for language understanding, reasoning, and safety. We release two sizes of models (2 billion and 7 billion parameters), and provide both pretrained and fine-tuned checkpoints. Gemma outperforms similarly sized open models on 11 out of 18 text-based tasks, and we present comprehensive evaluations of safety and responsibility aspects of the models, alongside a detailed description of model development. We believe the responsible release of LLMs is critical for improving the safety of frontier models, and for enabling the next wave of LLM innovations.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Learning how to Interact with a Complex Interface using Hierarchical Reinforcement Learning
Apr 21, 2022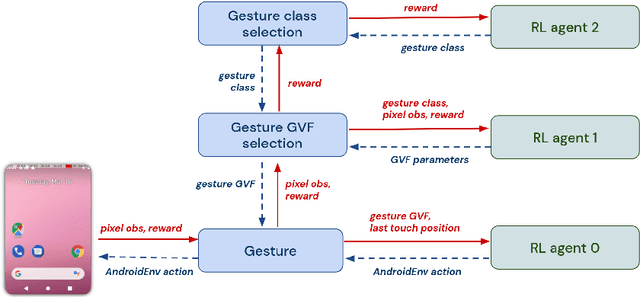
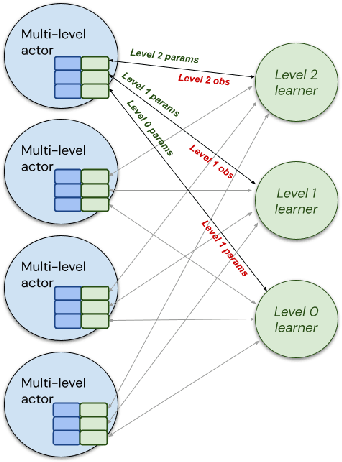
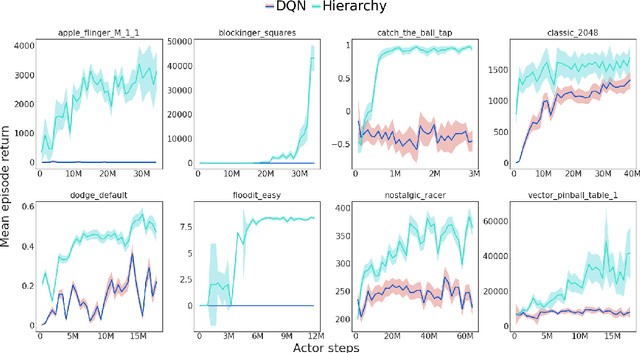
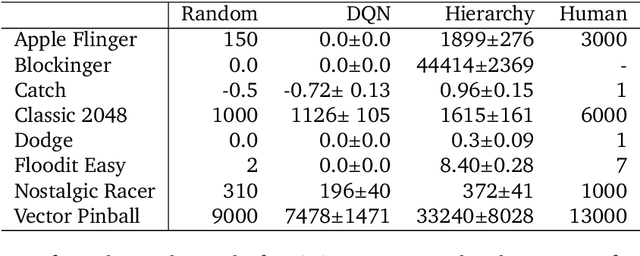
Hierarchical Reinforcement Learning (HRL) allows interactive agents to decompose complex problems into a hierarchy of sub-tasks. Higher-level tasks can invoke the solutions of lower-level tasks as if they were primitive actions. In this work, we study the utility of hierarchical decompositions for learning an appropriate way to interact with a complex interface. Specifically, we train HRL agents that can interface with applications in a simulated Android device. We introduce a Hierarchical Distributed Deep Reinforcement Learning architecture that learns (1) subtasks corresponding to simple finger gestures, and (2) how to combine these gestures to solve several Android tasks. Our approach relies on goal conditioning and can be used more generally to convert any base RL agent into an HRL agent. We use the AndroidEnv environment to evaluate our approach. For the experiments, the HRL agent uses a distributed version of the popular DQN algorithm to train different components of the hierarchy. While the native action space is completely intractable for simple DQN agents, our architecture can be used to establish an effective way to interact with different tasks, significantly improving the performance of the same DQN agent over different levels of abstraction.
Temporally Abstract Partial Models
Aug 06, 2021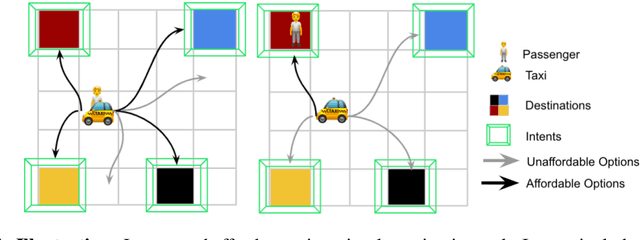

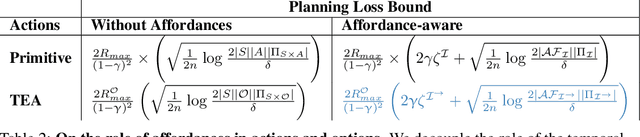
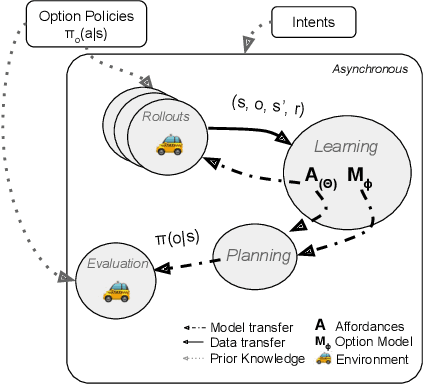
Humans and animals have the ability to reason and make predictions about different courses of action at many time scales. In reinforcement learning, option models (Sutton, Precup \& Singh, 1999; Precup, 2000) provide the framework for this kind of temporally abstract prediction and reasoning. Natural intelligent agents are also able to focus their attention on courses of action that are relevant or feasible in a given situation, sometimes termed affordable actions. In this paper, we define a notion of affordances for options, and develop temporally abstract partial option models, that take into account the fact that an option might be affordable only in certain situations. We analyze the trade-offs between estimation and approximation error in planning and learning when using such models, and identify some interesting special cases. Additionally, we demonstrate empirically the potential impact of partial option models on the efficiency of planning.
AndroidEnv: A Reinforcement Learning Platform for Android
May 27, 2021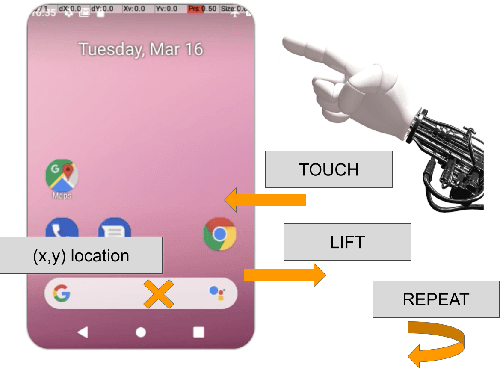
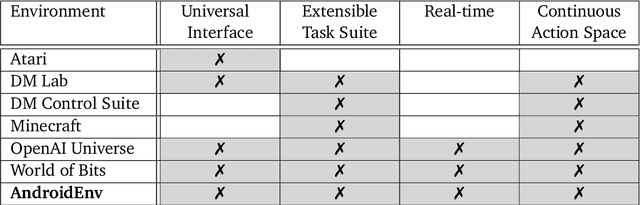
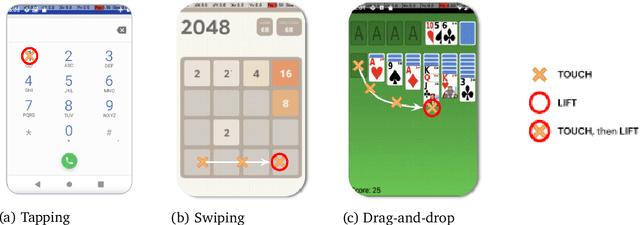
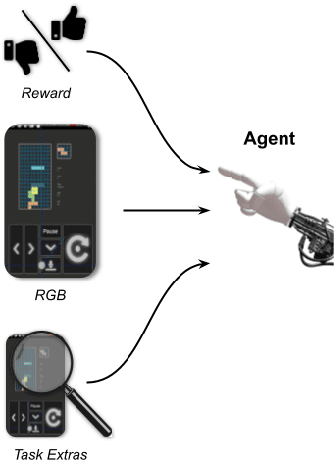
We introduce AndroidEnv, an open-source platform for Reinforcement Learning (RL) research built on top of the Android ecosystem. AndroidEnv allows RL agents to interact with a wide variety of apps and services commonly used by humans through a universal touchscreen interface. Since agents train on a realistic simulation of an Android device, they have the potential to be deployed on real devices. In this report, we give an overview of the environment, highlighting the significant features it provides for research, and we present an empirical evaluation of some popular reinforcement learning agents on a set of tasks built on this platform.
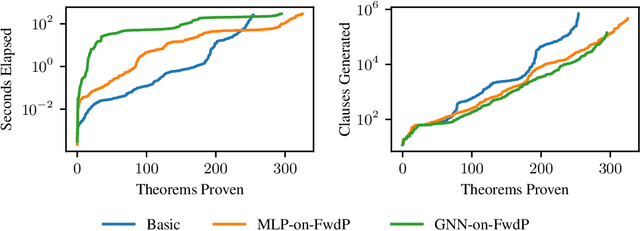
Training a First-Order Theorem Prover from Synthetic Data
Mar 05, 2021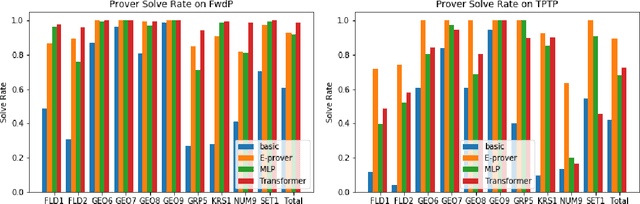
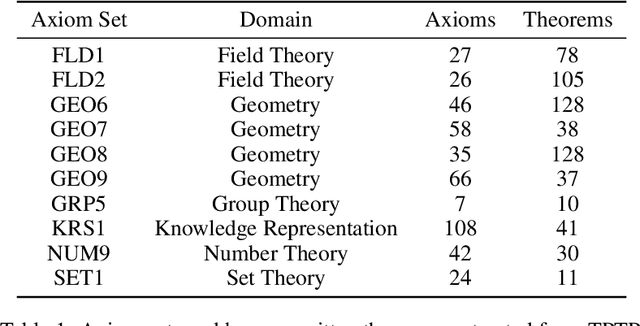
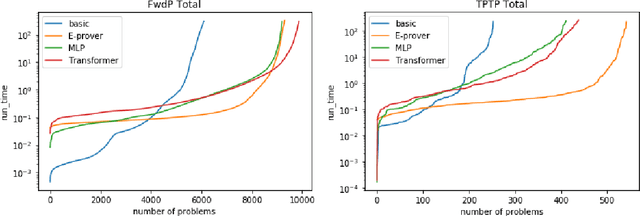
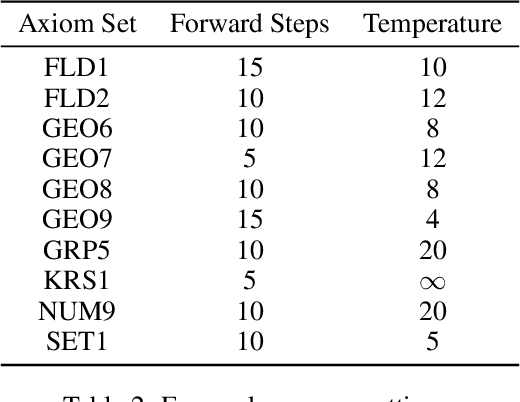
A major challenge in applying machine learning to automated theorem proving is the scarcity of training data, which is a key ingredient in training successful deep learning models. To tackle this problem, we propose an approach that relies on training purely with synthetically generated theorems, without any human data aside from axioms. We use these theorems to train a neurally-guided saturation-based prover. Our neural prover outperforms the state-of-the-art E-prover on this synthetic data in both time and search steps, and shows significant transfer to the unseen human-written theorems from the TPTP library, where it solves 72\% of first-order problems without equality.
What can I do here? A Theory of Affordances in Reinforcement Learning
Jun 26, 2020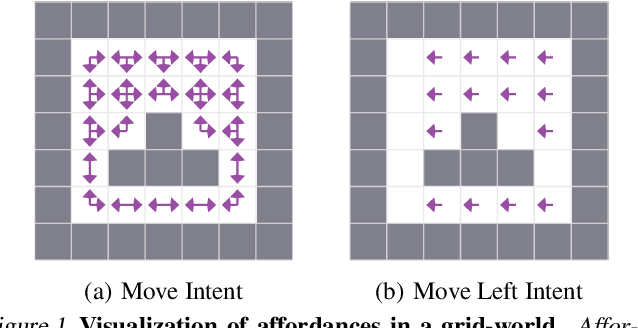
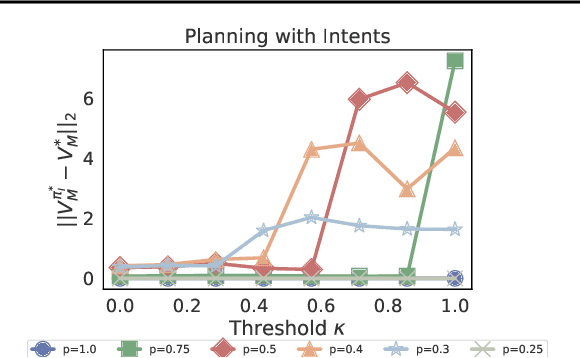
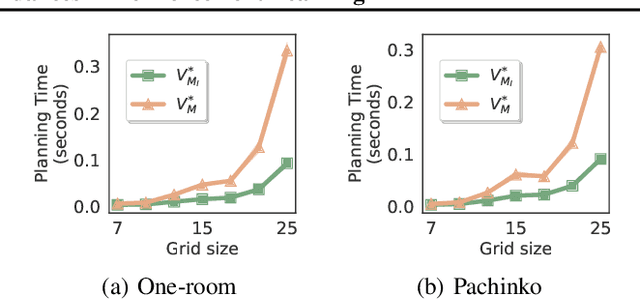
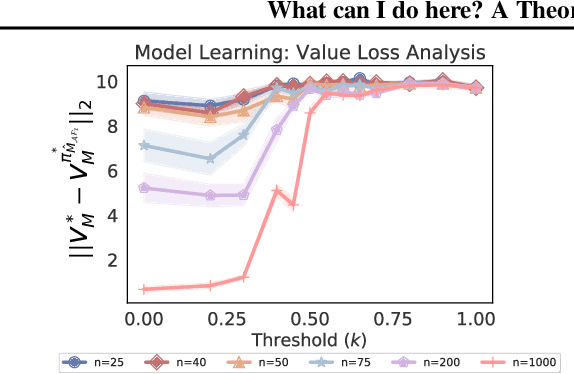
Reinforcement learning algorithms usually assume that all actions are always available to an agent. However, both people and animals understand the general link between the features of their environment and the actions that are feasible. Gibson (1977) coined the term "affordances" to describe the fact that certain states enable an agent to do certain actions, in the context of embodied agents. In this paper, we develop a theory of affordances for agents who learn and plan in Markov Decision Processes. Affordances play a dual role in this case. On one hand, they allow faster planning, by reducing the number of actions available in any given situation. On the other hand, they facilitate more efficient and precise learning of transition models from data, especially when such models require function approximation. We establish these properties through theoretical results as well as illustrative examples. We also propose an approach to learn affordances and use it to estimate transition models that are simpler and generalize better.
Learning to Prove from Synthetic Theorems
Jun 19, 2020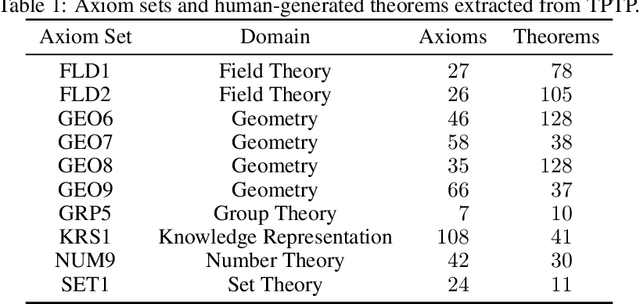
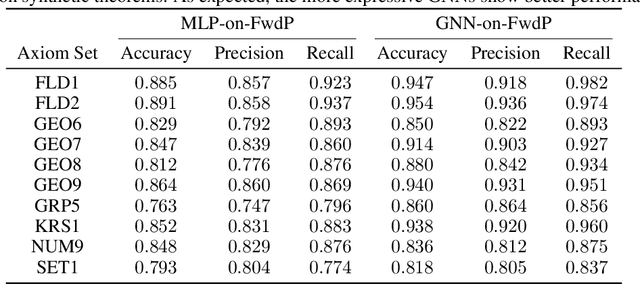
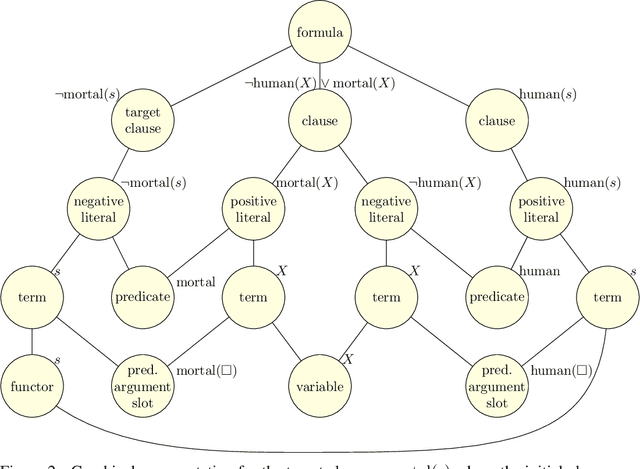
A major challenge in applying machine learning to automated theorem proving is the scarcity of training data, which is a key ingredient in training successful deep learning models. To tackle this problem, we propose an approach that relies on training with synthetic theorems, generated from a set of axioms. We show that such theorems can be used to train an automated prover and that the learned prover transfers successfully to human-generated theorems. We demonstrate that a prover trained exclusively on synthetic theorems can solve a substantial fraction of problems in TPTP, a benchmark dataset that is used to compare state-of-the-art heuristic provers. Our approach outperforms a model trained on human-generated problems in most axiom sets, thereby showing the promise of using synthetic data for this task.
Marginalized State Distribution Entropy Regularization in Policy Optimization
Dec 11, 2019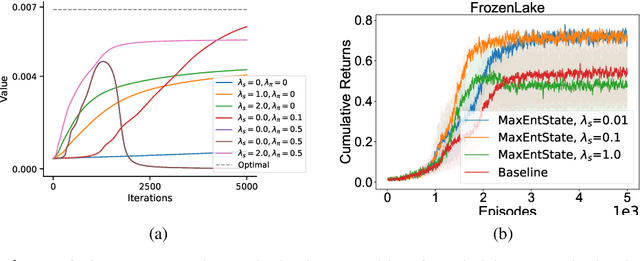
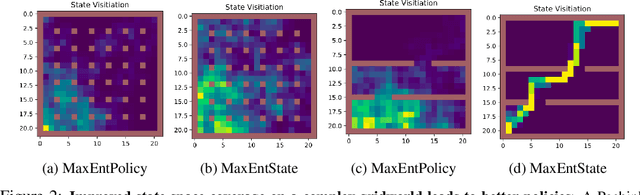
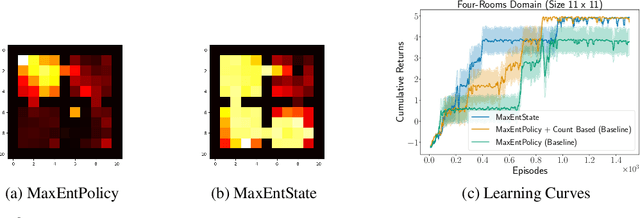
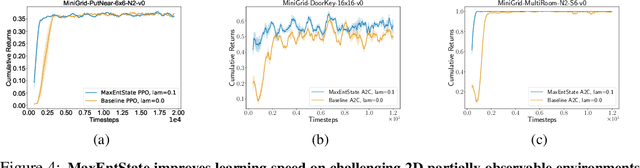
Entropy regularization is used to get improved optimization performance in reinforcement learning tasks. A common form of regularization is to maximize policy entropy to avoid premature convergence and lead to more stochastic policies for exploration through action space. However, this does not ensure exploration in the state space. In this work, we instead consider the distribution of discounted weighting of states, and propose to maximize the entropy of a lower bound approximation to the weighting of a state, based on latent space state representation. We propose entropy regularization based on the marginal state distribution, to encourage the policy to have a more uniform distribution over the state space for exploration. Our approach based on marginal state distribution achieves superior state space coverage on complex gridworld domains, that translate into empirical gains in sparse reward 3D maze navigation and continuous control domains compared to entropy regularization with stochastic policies.