 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncoder-Decoder Gemma: Improving the Quality-Efficiency Trade-Off via Adaptation
Apr 08, 2025While decoder-only large language models (LLMs) have shown impressive results, encoder-decoder models are still widely adopted in real-world applications for their inference efficiency and richer encoder representation. In this paper, we study a novel problem: adapting pretrained decoder-only LLMs to encoder-decoder, with the goal of leveraging the strengths of both approaches to achieve a more favorable quality-efficiency trade-off. We argue that adaptation not only enables inheriting the capability of decoder-only LLMs but also reduces the demand for computation compared to pretraining from scratch. We rigorously explore different pretraining objectives and parameter initialization/optimization techniques. Through extensive experiments based on Gemma 2 (2B and 9B) and a suite of newly pretrained mT5-sized models (up to 1.6B), we demonstrate the effectiveness of adaptation and the advantage of encoder-decoder LLMs. Under similar inference budget, encoder-decoder LLMs achieve comparable (often better) pretraining performance but substantially better finetuning performance than their decoder-only counterpart. For example, Gemma 2B-2B outperforms Gemma 2B by $\sim$7\% after instruction tuning. Encoder-decoder adaptation also allows for flexible combination of different-sized models, where Gemma 9B-2B significantly surpasses Gemma 2B-2B by $>$3\%. The adapted encoder representation also yields better results on SuperGLUE. We will release our checkpoints to facilitate future research.
Gemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Gemma 2: Improving Open Language Models at a Practical Size
Aug 02, 2024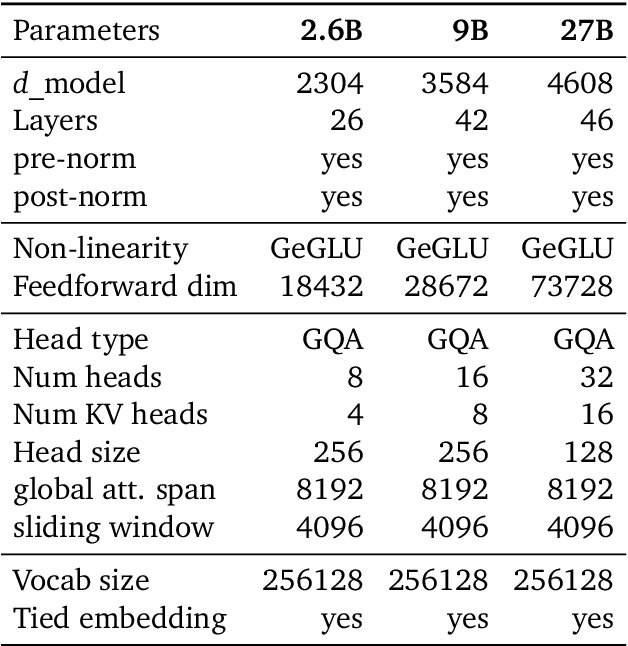
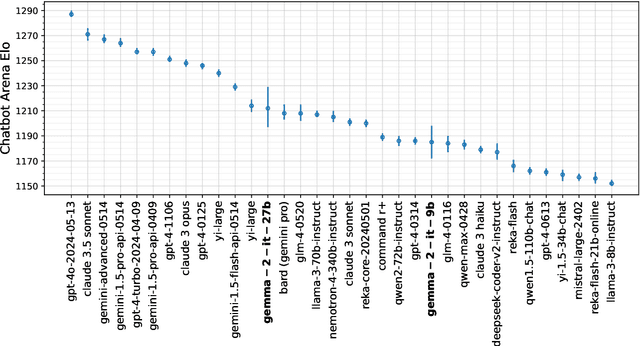
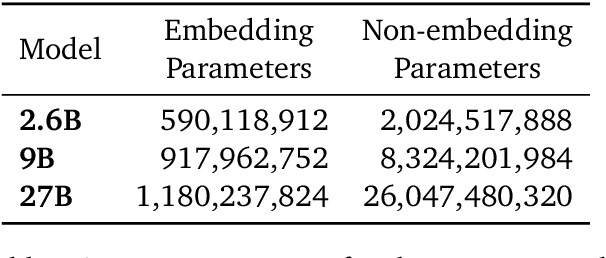
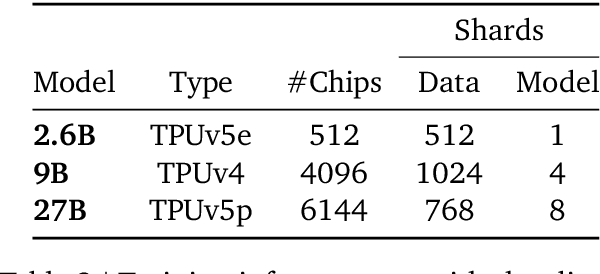
In this work, we introduce Gemma 2, a new addition to the Gemma family of lightweight, state-of-the-art open models, ranging in scale from 2 billion to 27 billion parameters. In this new version, we apply several known technical modifications to the Transformer architecture, such as interleaving local-global attentions (Beltagy et al., 2020a) and group-query attention (Ainslie et al., 2023). We also train the 2B and 9B models with knowledge distillation (Hinton et al., 2015) instead of next token prediction. The resulting models deliver the best performance for their size, and even offer competitive alternatives to models that are 2-3 times bigger. We release all our models to the community.
RecurrentGemma: Moving Past Transformers for Efficient Open Language Models
Apr 11, 2024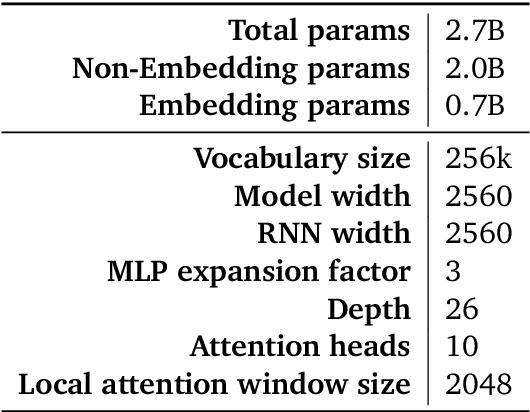
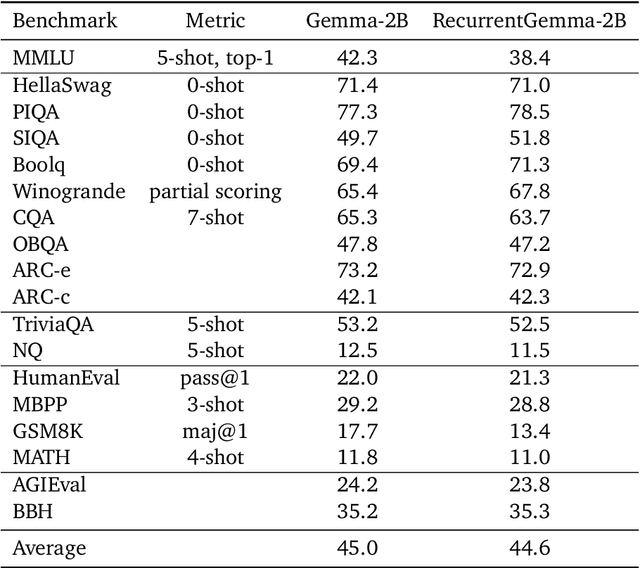
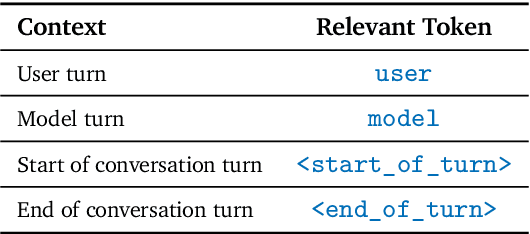
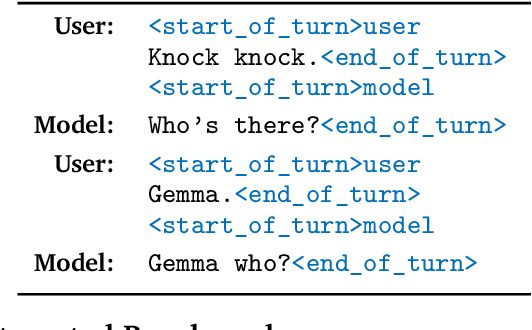
We introduce RecurrentGemma, an open language model which uses Google's novel Griffin architecture. Griffin combines linear recurrences with local attention to achieve excellent performance on language. It has a fixed-sized state, which reduces memory use and enables efficient inference on long sequences. We provide a pre-trained model with 2B non-embedding parameters, and an instruction tuned variant. Both models achieve comparable performance to Gemma-2B despite being trained on fewer tokens.
Gemma: Open Models Based on Gemini Research and Technology
Mar 13, 2024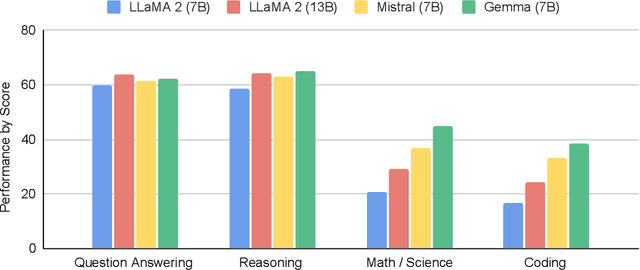
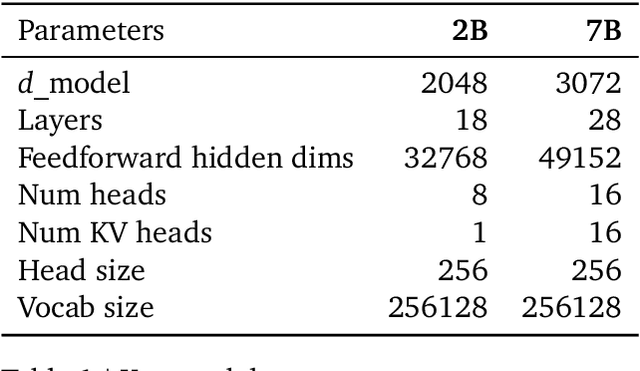
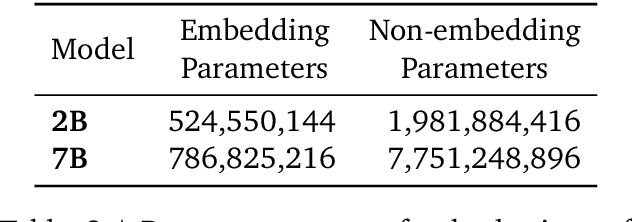
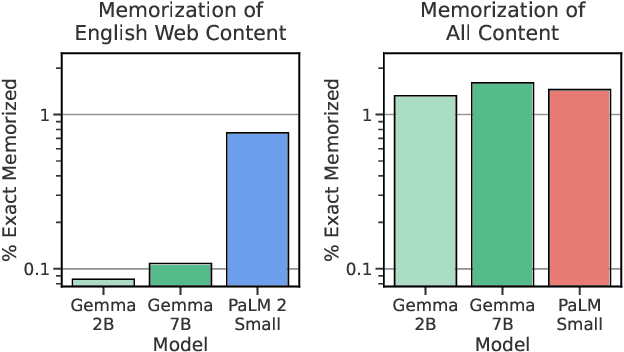
This work introduces Gemma, a family of lightweight, state-of-the art open models built from the research and technology used to create Gemini models. Gemma models demonstrate strong performance across academic benchmarks for language understanding, reasoning, and safety. We release two sizes of models (2 billion and 7 billion parameters), and provide both pretrained and fine-tuned checkpoints. Gemma outperforms similarly sized open models on 11 out of 18 text-based tasks, and we present comprehensive evaluations of safety and responsibility aspects of the models, alongside a detailed description of model development. We believe the responsible release of LLMs is critical for improving the safety of frontier models, and for enabling the next wave of LLM innovations.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Skill Rating for Generative Models
Aug 14, 2018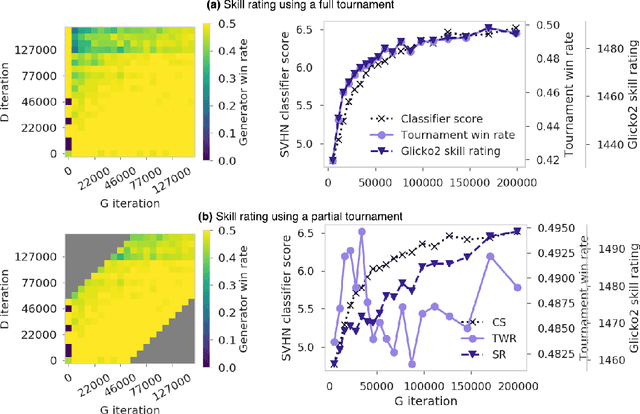
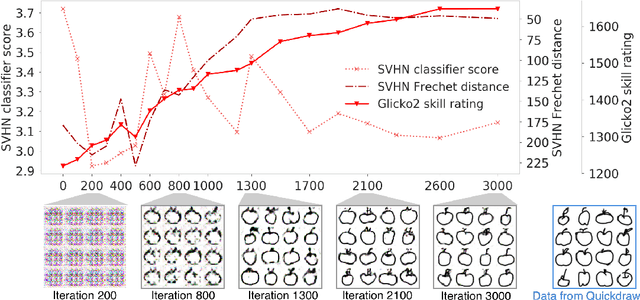
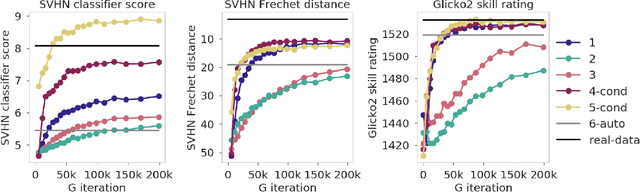
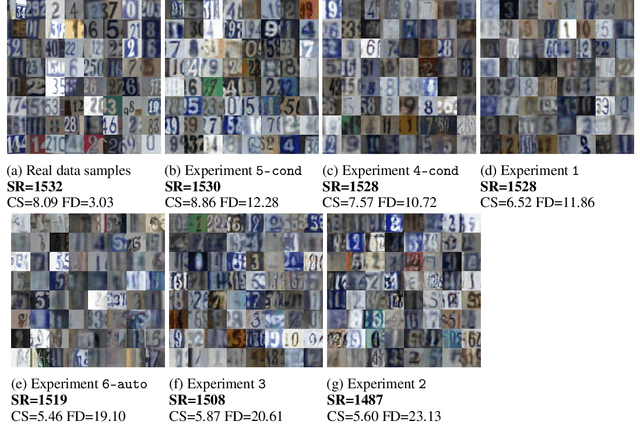
We explore a new way to evaluate generative models using insights from evaluation of competitive games between human players. We show experimentally that tournaments between generators and discriminators provide an effective way to evaluate generative models. We introduce two methods for summarizing tournament outcomes: tournament win rate and skill rating. Evaluations are useful in different contexts, including monitoring the progress of a single model as it learns during the training process, and comparing the capabilities of two different fully trained models. We show that a tournament consisting of a single model playing against past and future versions of itself produces a useful measure of training progress. A tournament containing multiple separate models (using different seeds, hyperparameters, and architectures) provides a useful relative comparison between different trained GANs. Tournament-based rating methods are conceptually distinct from numerous previous categories of approaches to evaluation of generative models, and have complementary advantages and disadvantages.
Towards Mixed Optimization for Reinforcement Learning with Program Synthesis
Jul 03, 2018
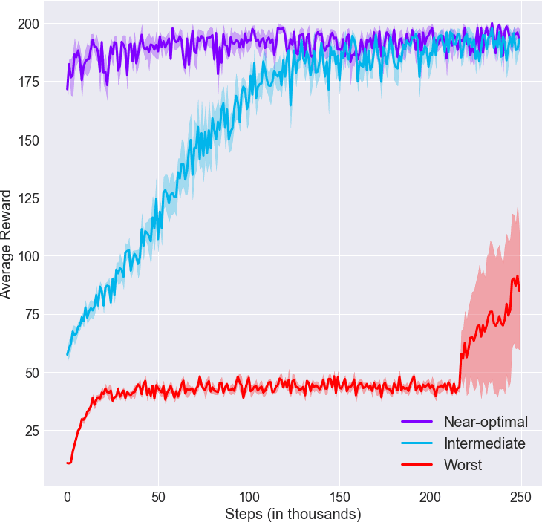
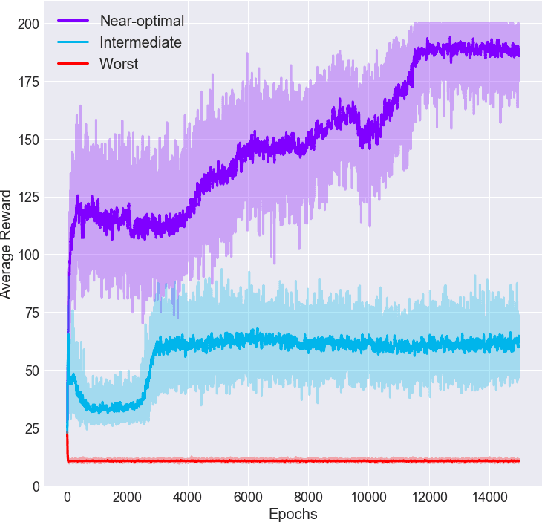
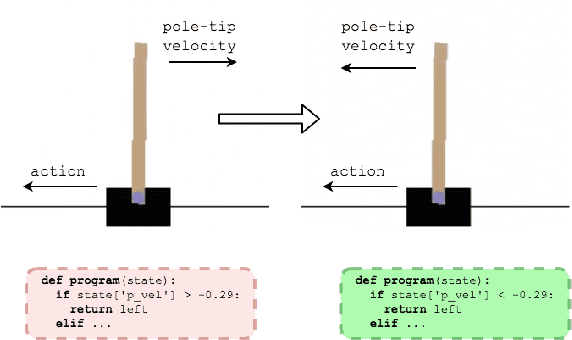
Deep reinforcement learning has led to several recent breakthroughs, though the learned policies are often based on black-box neural networks. This makes them difficult to interpret and to impose desired specification constraints during learning. We present an iterative framework, MORL, for improving the learned policies using program synthesis. Concretely, we propose to use synthesis techniques to obtain a symbolic representation of the learned policy, which can then be debugged manually or automatically using program repair. After the repair step, we use behavior cloning to obtain the policy corresponding to the repaired program, which is then further improved using gradient descent. This process continues until the learned policy satisfies desired constraints. We instantiate MORL for the simple CartPole problem and show that the programmatic representation allows for high-level modifications that in turn lead to improved learning of the policies.
The Mirage of Action-Dependent Baselines in Reinforcement Learning
Apr 06, 2018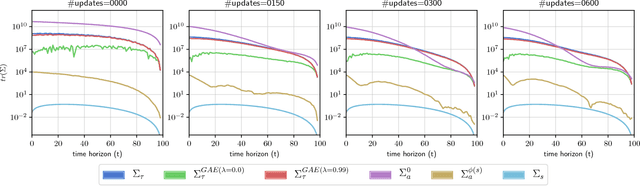
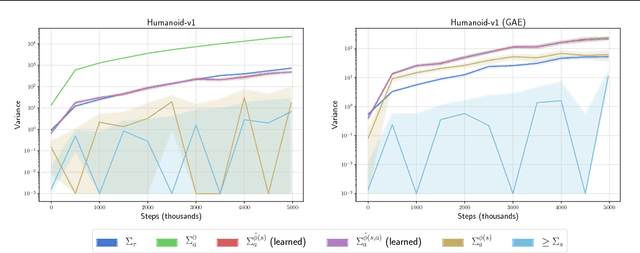
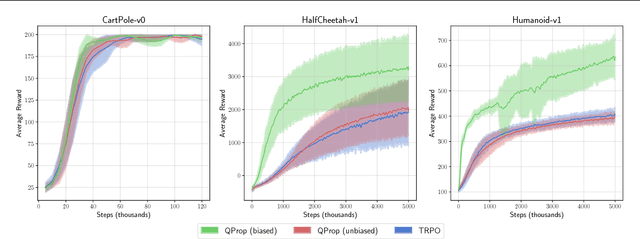
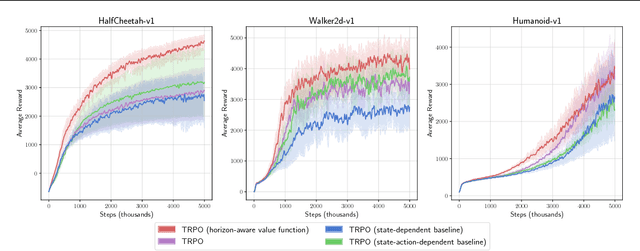
Policy gradient methods are a widely used class of model-free reinforcement learning algorithms where a state-dependent baseline is used to reduce gradient estimator variance. Several recent papers extend the baseline to depend on both the state and action and suggest that this significantly reduces variance and improves sample efficiency without introducing bias into the gradient estimates. To better understand this development, we decompose the variance of the policy gradient estimator and numerically show that learned state-action-dependent baselines do not in fact reduce variance over a state-dependent baseline in commonly tested benchmark domains. We confirm this unexpected result by reviewing the open-source code accompanying these prior papers, and show that subtle implementation decisions cause deviations from the methods presented in the papers and explain the source of the previously observed empirical gains. Furthermore, the variance decomposition highlights areas for improvement, which we demonstrate by illustrating a simple change to the typical value function parameterization that can significantly improve performance.
Deep API Programmer: Learning to Program with APIs
Apr 14, 2017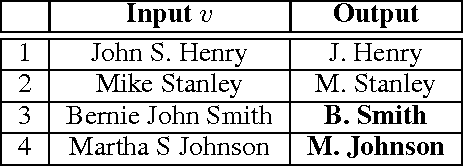
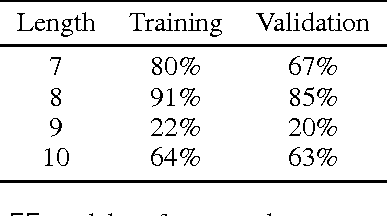
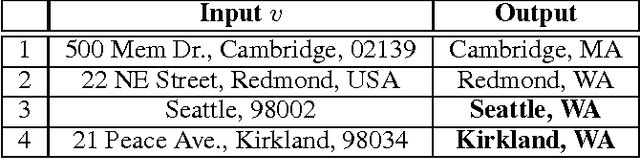

We present DAPIP, a Programming-By-Example system that learns to program with APIs to perform data transformation tasks. We design a domain-specific language (DSL) that allows for arbitrary concatenations of API outputs and constant strings. The DSL consists of three family of APIs: regular expression-based APIs, lookup APIs, and transformation APIs. We then present a novel neural synthesis algorithm to search for programs in the DSL that are consistent with a given set of examples. The search algorithm uses recently introduced neural architectures to encode input-output examples and to model the program search in the DSL. We show that synthesis algorithm outperforms baseline methods for synthesizing programs on both synthetic and real-world benchmarks.