 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
PaliGemma 2: A Family of Versatile VLMs for Transfer
Dec 04, 2024



PaliGemma 2 is an upgrade of the PaliGemma open Vision-Language Model (VLM) based on the Gemma 2 family of language models. We combine the SigLIP-So400m vision encoder that was also used by PaliGemma with the whole range of Gemma 2 models, from the 2B one all the way up to the 27B model. We train these models at three resolutions (224px, 448px, and 896px) in multiple stages to equip them with broad knowledge for transfer via fine-tuning. The resulting family of base models covering different model sizes and resolutions allows us to investigate factors impacting transfer performance (such as learning rate) and to analyze the interplay between the type of task, model size, and resolution. We further increase the number and breadth of transfer tasks beyond the scope of PaliGemma including different OCR-related tasks such as table structure recognition, molecular structure recognition, music score recognition, as well as long fine-grained captioning and radiography report generation, on which PaliGemma 2 obtains state-of-the-art results.
Gemma 2: Improving Open Language Models at a Practical Size
Aug 02, 2024
In this work, we introduce Gemma 2, a new addition to the Gemma family of lightweight, state-of-the-art open models, ranging in scale from 2 billion to 27 billion parameters. In this new version, we apply several known technical modifications to the Transformer architecture, such as interleaving local-global attentions (Beltagy et al., 2020a) and group-query attention (Ainslie et al., 2023). We also train the 2B and 9B models with knowledge distillation (Hinton et al., 2015) instead of next token prediction. The resulting models deliver the best performance for their size, and even offer competitive alternatives to models that are 2-3 times bigger. We release all our models to the community.
RecurrentGemma: Moving Past Transformers for Efficient Open Language Models
Apr 11, 2024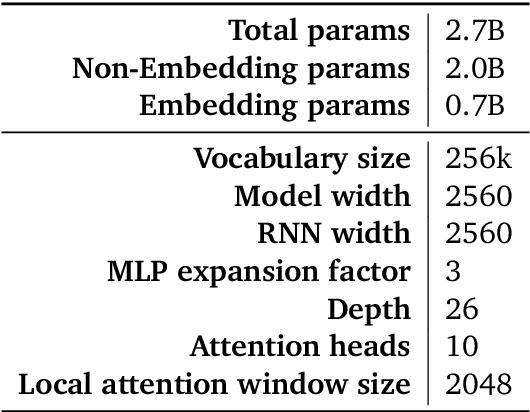
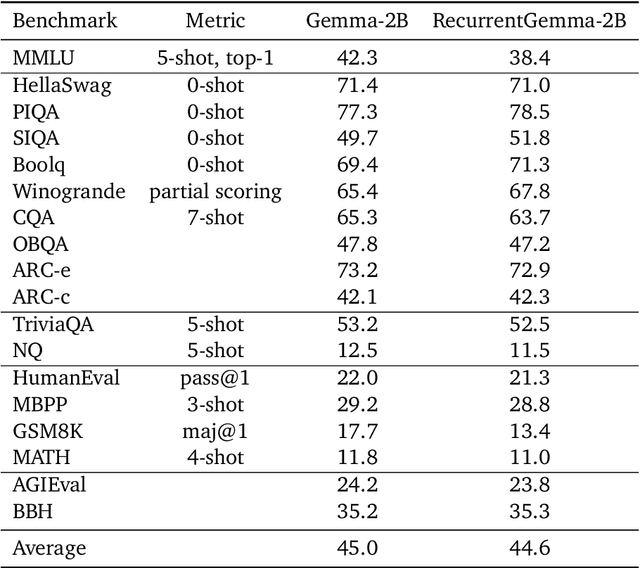
We introduce RecurrentGemma, an open language model which uses Google's novel Griffin architecture. Griffin combines linear recurrences with local attention to achieve excellent performance on language. It has a fixed-sized state, which reduces memory use and enables efficient inference on long sequences. We provide a pre-trained model with 2B non-embedding parameters, and an instruction tuned variant. Both models achieve comparable performance to Gemma-2B despite being trained on fewer tokens.
Gemma: Open Models Based on Gemini Research and Technology
Mar 13, 2024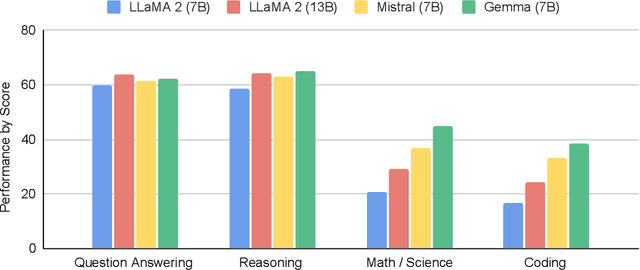
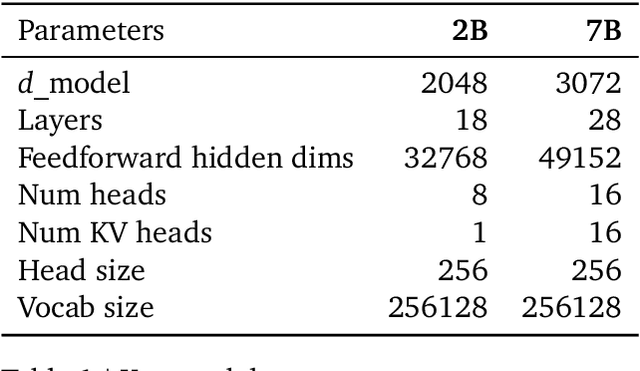
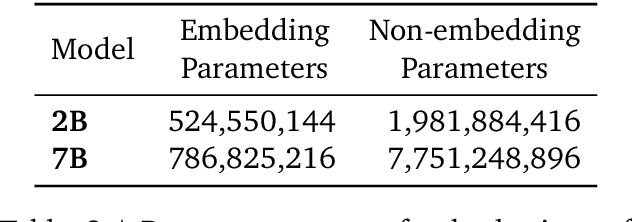
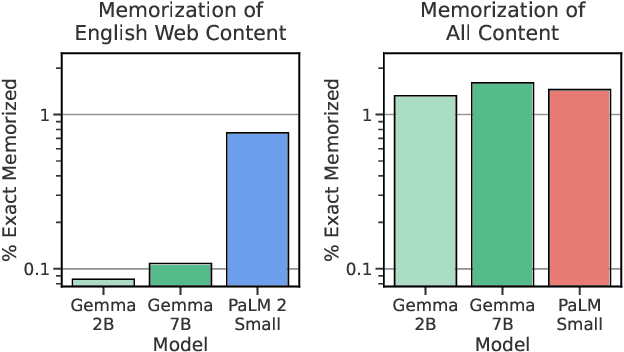
This work introduces Gemma, a family of lightweight, state-of-the art open models built from the research and technology used to create Gemini models. Gemma models demonstrate strong performance across academic benchmarks for language understanding, reasoning, and safety. We release two sizes of models (2 billion and 7 billion parameters), and provide both pretrained and fine-tuned checkpoints. Gemma outperforms similarly sized open models on 11 out of 18 text-based tasks, and we present comprehensive evaluations of safety and responsibility aspects of the models, alongside a detailed description of model development. We believe the responsible release of LLMs is critical for improving the safety of frontier models, and for enabling the next wave of LLM innovations.
Direct Language Model Alignment from Online AI Feedback
Feb 07, 2024



Direct alignment from preferences (DAP) methods, such as DPO, have recently emerged as efficient alternatives to reinforcement learning from human feedback (RLHF), that do not require a separate reward model. However, the preference datasets used in DAP methods are usually collected ahead of training and never updated, thus the feedback is purely offline. Moreover, responses in these datasets are often sampled from a language model distinct from the one being aligned, and since the model evolves over training, the alignment phase is inevitably off-policy. In this study, we posit that online feedback is key and improves DAP methods. Our method, online AI feedback (OAIF), uses an LLM as annotator: on each training iteration, we sample two responses from the current model and prompt the LLM annotator to choose which one is preferred, thus providing online feedback. Despite its simplicity, we demonstrate via human evaluation in several tasks that OAIF outperforms both offline DAP and RLHF methods. We further show that the feedback leveraged in OAIF is easily controllable, via instruction prompts to the LLM annotator.
Nash Learning from Human Feedback
Dec 06, 2023



Reinforcement learning from human feedback (RLHF) has emerged as the main paradigm for aligning large language models (LLMs) with human preferences. Typically, RLHF involves the initial step of learning a reward model from human feedback, often expressed as preferences between pairs of text generations produced by a pre-trained LLM. Subsequently, the LLM's policy is fine-tuned by optimizing it to maximize the reward model through a reinforcement learning algorithm. However, an inherent limitation of current reward models is their inability to fully represent the richness of human preferences and their dependency on the sampling distribution. In this study, we introduce an alternative pipeline for the fine-tuning of LLMs using pairwise human feedback. Our approach entails the initial learning of a preference model, which is conditioned on two inputs given a prompt, followed by the pursuit of a policy that consistently generates responses preferred over those generated by any competing policy, thus defining the Nash equilibrium of this preference model. We term this approach Nash learning from human feedback (NLHF). In the context of a tabular policy representation, we present a novel algorithmic solution, Nash-MD, founded on the principles of mirror descent. This algorithm produces a sequence of policies, with the last iteration converging to the regularized Nash equilibrium. Additionally, we explore parametric representations of policies and introduce gradient descent algorithms for deep-learning architectures. To demonstrate the effectiveness of our approach, we present experimental results involving the fine-tuning of a LLM for a text summarization task. We believe NLHF offers a compelling avenue for preference learning and policy optimization with the potential of advancing the field of aligning LLMs with human preferences.
A Survey of Temporal Credit Assignment in Deep Reinforcement Learning
Dec 02, 2023



The Credit Assignment Problem (CAP) refers to the longstanding challenge of Reinforcement Learning (RL) agents to associate actions with their long-term consequences. Solving the CAP is a crucial step towards the successful deployment of RL in the real world since most decision problems provide feedback that is noisy, delayed, and with little or no information about the causes. These conditions make it hard to distinguish serendipitous outcomes from those caused by informed decision-making. However, the mathematical nature of credit and the CAP remains poorly understood and defined. In this survey, we review the state of the art of Temporal Credit Assignment (CA) in deep RL. We propose a unifying formalism for credit that enables equitable comparisons of state of the art algorithms and improves our understanding of the trade-offs between the various methods. We cast the CAP as the problem of learning the influence of an action over an outcome from a finite amount of experience. We discuss the challenges posed by delayed effects, transpositions, and a lack of action influence, and analyse how existing methods aim to address them. Finally, we survey the protocols to evaluate a credit assignment method, and suggest ways to diagnoses the sources of struggle for different credit assignment methods. Overall, this survey provides an overview of the field for new-entry practitioners and researchers, it offers a coherent perspective for scholars looking to expedite the starting stages of a new study on the CAP, and it suggests potential directions for future research
RLAIF: Scaling Reinforcement Learning from Human Feedback with AI Feedback
Sep 01, 2023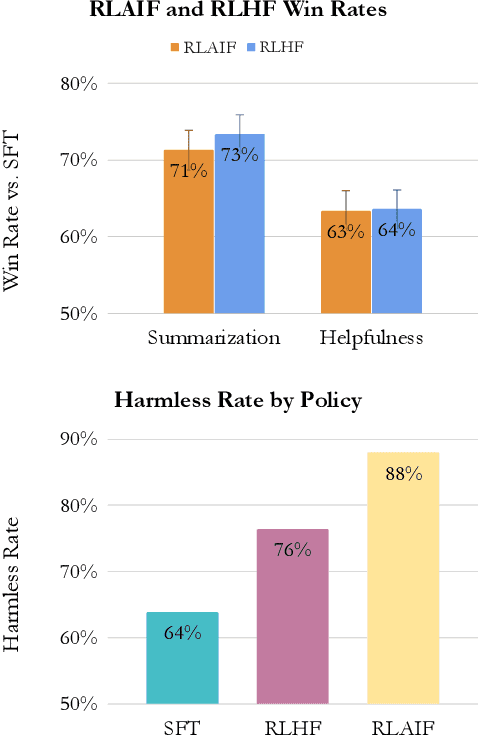
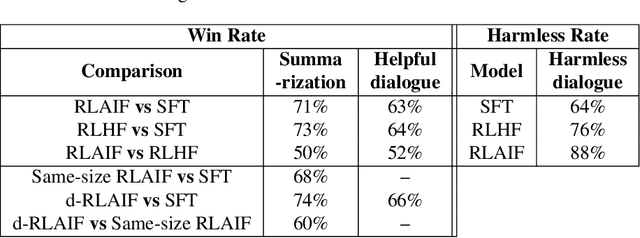
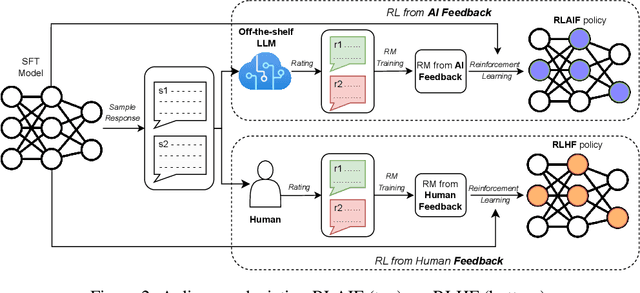

Reinforcement learning from human feedback (RLHF) is effective at aligning large language models (LLMs) to human preferences, but gathering high quality human preference labels is a key bottleneck. We conduct a head-to-head comparison of RLHF vs. RL from AI Feedback (RLAIF) - a technique where preferences are labeled by an off-the-shelf LLM in lieu of humans, and we find that they result in similar improvements. On the task of summarization, human evaluators prefer generations from both RLAIF and RLHF over a baseline supervised fine-tuned model in ~70% of cases. Furthermore, when asked to rate RLAIF vs. RLHF summaries, humans prefer both at equal rates. These results suggest that RLAIF can yield human-level performance, offering a potential solution to the scalability limitations of RLHF.
Curiosity in hindsight
Nov 18, 2022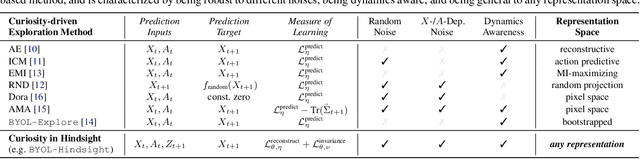
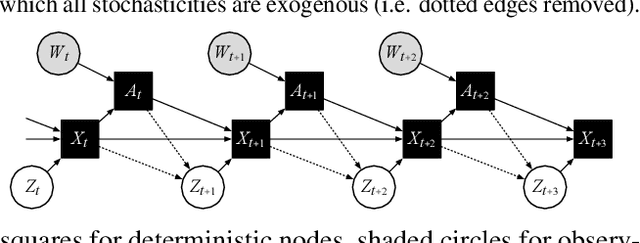
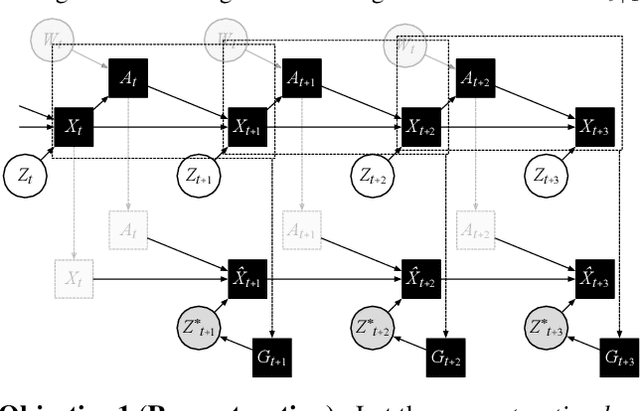
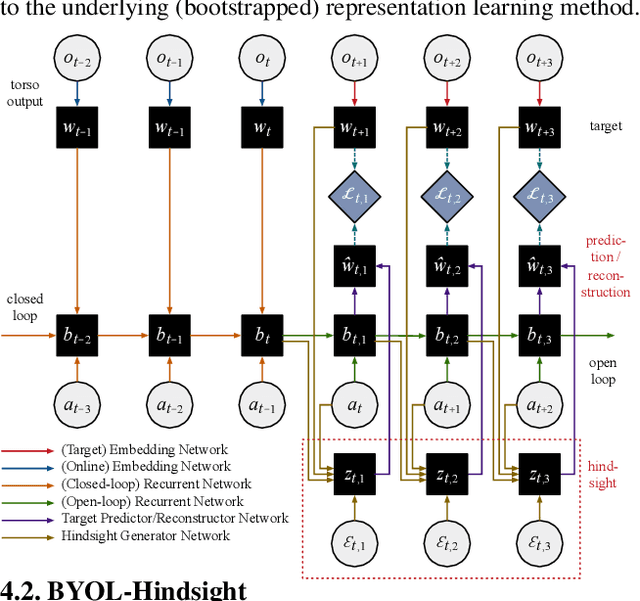
Consider the exploration in sparse-reward or reward-free environments, such as Montezuma's Revenge. The curiosity-driven paradigm dictates an intuitive technique: At each step, the agent is rewarded for how much the realized outcome differs from their predicted outcome. However, using predictive error as intrinsic motivation is prone to fail in stochastic environments, as the agent may become hopelessly drawn to high-entropy areas of the state-action space, such as a noisy TV. Therefore it is important to distinguish between aspects of world dynamics that are inherently predictable and aspects that are inherently unpredictable: The former should constitute a source of intrinsic reward, whereas the latter should not. In this work, we study a natural solution derived from structural causal models of the world: Our key idea is to learn representations of the future that capture precisely the unpredictable aspects of each outcome -- not any more, not any less -- which we use as additional input for predictions, such that intrinsic rewards do vanish in the limit. First, we propose incorporating such hindsight representations into the agent's model to disentangle "noise" from "novelty", yielding Curiosity in Hindsight: a simple and scalable generalization of curiosity that is robust to all types of stochasticity. Second, we implement this framework as a drop-in modification of any prediction-based exploration bonus, and instantiate it for the recently introduced BYOL-Explore algorithm as a prime example, resulting in the noise-robust "BYOL-Hindsight". Third, we illustrate its behavior under various stochasticities in a grid world, and find improvements over BYOL-Explore in hard-exploration Atari games with sticky actions. Importantly, we show SOTA results in exploring Montezuma with sticky actions, while preserving performance in the non-sticky setting.