 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage Agents as Digital Representatives in Collective Decision-Making
Feb 13, 2025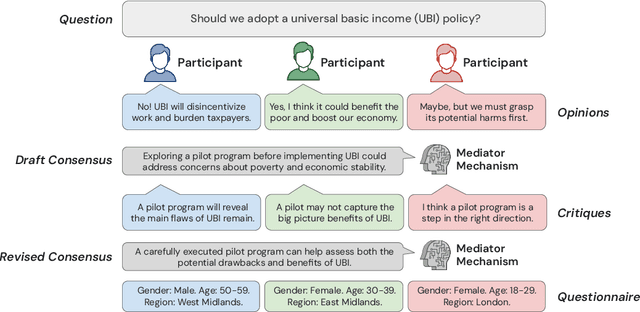
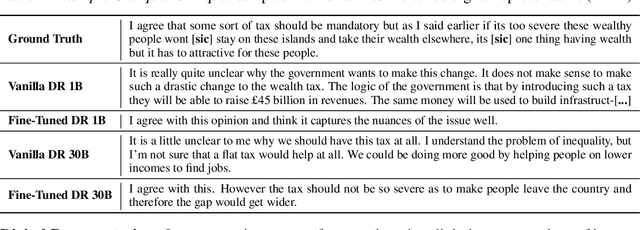
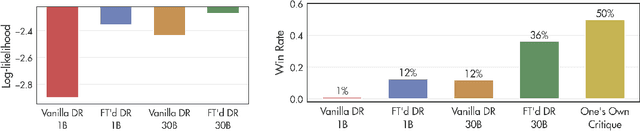
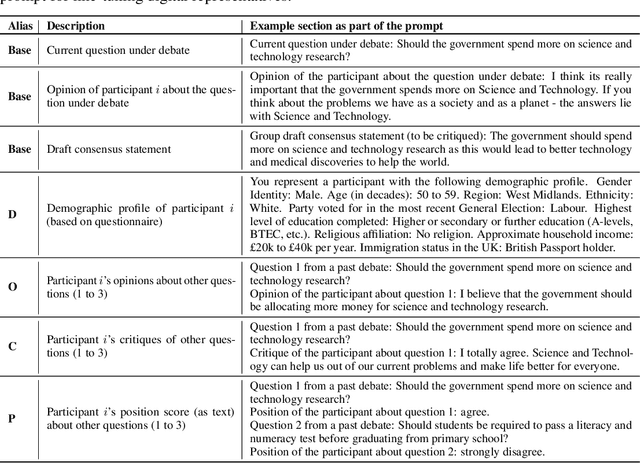
Consider the process of collective decision-making, in which a group of individuals interactively select a preferred outcome from among a universe of alternatives. In this context, "representation" is the activity of making an individual's preferences present in the process via participation by a proxy agent -- i.e. their "representative". To this end, learned models of human behavior have the potential to fill this role, with practical implications for multi-agent scenario studies and mechanism design. In this work, we investigate the possibility of training \textit{language agents} to behave in the capacity of representatives of human agents, appropriately expressing the preferences of those individuals whom they stand for. First, we formalize the setting of \textit{collective decision-making} -- as the episodic process of interaction between a group of agents and a decision mechanism. On this basis, we then formalize the problem of \textit{digital representation} -- as the simulation of an agent's behavior to yield equivalent outcomes from the mechanism. Finally, we conduct an empirical case study in the setting of \textit{consensus-finding} among diverse humans, and demonstrate the feasibility of fine-tuning large language models to act as digital representatives.
Invariant Causal Imitation Learning for Generalizable Policies
Nov 02, 2023Consider learning an imitation policy on the basis of demonstrated behavior from multiple environments, with an eye towards deployment in an unseen environment. Since the observable features from each setting may be different, directly learning individual policies as mappings from features to actions is prone to spurious correlations -- and may not generalize well. However, the expert's policy is often a function of a shared latent structure underlying those observable features that is invariant across settings. By leveraging data from multiple environments, we propose Invariant Causal Imitation Learning (ICIL), a novel technique in which we learn a feature representation that is invariant across domains, on the basis of which we learn an imitation policy that matches expert behavior. To cope with transition dynamics mismatch, ICIL learns a shared representation of causal features (for all training environments), that is disentangled from the specific representations of noise variables (for each of those environments). Moreover, to ensure that the learned policy matches the observation distribution of the expert's policy, ICIL estimates the energy of the expert's observations and uses a regularization term that minimizes the imitator policy's next state energy. Experimentally, we compare our methods against several benchmarks in control and healthcare tasks and show its effectiveness in learning imitation policies capable of generalizing to unseen environments.
Time-series Generation by Contrastive Imitation
Nov 02, 2023



Consider learning a generative model for time-series data. The sequential setting poses a unique challenge: Not only should the generator capture the conditional dynamics of (stepwise) transitions, but its open-loop rollouts should also preserve the joint distribution of (multi-step) trajectories. On one hand, autoregressive models trained by MLE allow learning and computing explicit transition distributions, but suffer from compounding error during rollouts. On the other hand, adversarial models based on GAN training alleviate such exposure bias, but transitions are implicit and hard to assess. In this work, we study a generative framework that seeks to combine the strengths of both: Motivated by a moment-matching objective to mitigate compounding error, we optimize a local (but forward-looking) transition policy, where the reinforcement signal is provided by a global (but stepwise-decomposable) energy model trained by contrastive estimation. At training, the two components are learned cooperatively, avoiding the instabilities typical of adversarial objectives. At inference, the learned policy serves as the generator for iterative sampling, and the learned energy serves as a trajectory-level measure for evaluating sample quality. By expressly training a policy to imitate sequential behavior of time-series features in a dataset, this approach embodies "generation by imitation". Theoretically, we illustrate the correctness of this formulation and the consistency of the algorithm. Empirically, we evaluate its ability to generate predictively useful samples from real-world datasets, verifying that it performs at the standard of existing benchmarks.
Explaining by Imitating: Understanding Decisions by Interpretable Policy Learning
Oct 28, 2023



Understanding human behavior from observed data is critical for transparency and accountability in decision-making. Consider real-world settings such as healthcare, in which modeling a decision-maker's policy is challenging -- with no access to underlying states, no knowledge of environment dynamics, and no allowance for live experimentation. We desire learning a data-driven representation of decision-making behavior that (1) inheres transparency by design, (2) accommodates partial observability, and (3) operates completely offline. To satisfy these key criteria, we propose a novel model-based Bayesian method for interpretable policy learning ("Interpole") that jointly estimates an agent's (possibly biased) belief-update process together with their (possibly suboptimal) belief-action mapping. Through experiments on both simulated and real-world data for the problem of Alzheimer's disease diagnosis, we illustrate the potential of our approach as an investigative device for auditing, quantifying, and understanding human decision-making behavior.
Online Decision Mediation
Oct 28, 2023

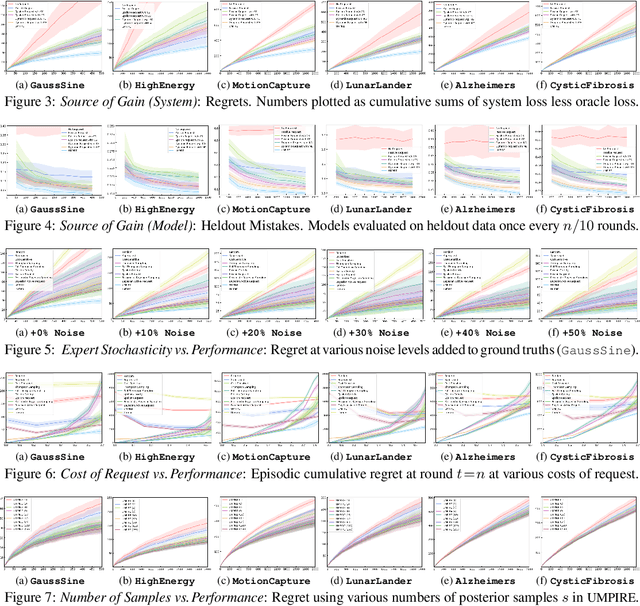
Consider learning a decision support assistant to serve as an intermediary between (oracle) expert behavior and (imperfect) human behavior: At each time, the algorithm observes an action chosen by a fallible agent, and decides whether to *accept* that agent's decision, *intervene* with an alternative, or *request* the expert's opinion. For instance, in clinical diagnosis, fully-autonomous machine behavior is often beyond ethical affordances, thus real-world decision support is often limited to monitoring and forecasting. Instead, such an intermediary would strike a prudent balance between the former (purely prescriptive) and latter (purely descriptive) approaches, while providing an efficient interface between human mistakes and expert feedback. In this work, we first formalize the sequential problem of *online decision mediation* -- that is, of simultaneously learning and evaluating mediator policies from scratch with *abstentive feedback*: In each round, deferring to the oracle obviates the risk of error, but incurs an upfront penalty, and reveals the otherwise hidden expert action as a new training data point. Second, we motivate and propose a solution that seeks to trade off (immediate) loss terms against (future) improvements in generalization error; in doing so, we identify why conventional bandit algorithms may fail. Finally, through experiments and sensitivities on a variety of datasets, we illustrate consistent gains over applicable benchmarks on performance measures with respect to the mediator policy, the learned model, and the decision-making system as a whole.
Clairvoyance: A Pipeline Toolkit for Medical Time Series
Oct 28, 2023Time-series learning is the bread and butter of data-driven *clinical decision support*, and the recent explosion in ML research has demonstrated great potential in various healthcare settings. At the same time, medical time-series problems in the wild are challenging due to their highly *composite* nature: They entail design choices and interactions among components that preprocess data, impute missing values, select features, issue predictions, estimate uncertainty, and interpret models. Despite exponential growth in electronic patient data, there is a remarkable gap between the potential and realized utilization of ML for clinical research and decision support. In particular, orchestrating a real-world project lifecycle poses challenges in engineering (i.e. hard to build), evaluation (i.e. hard to assess), and efficiency (i.e. hard to optimize). Designed to address these issues simultaneously, Clairvoyance proposes a unified, end-to-end, autoML-friendly pipeline that serves as a (i) software toolkit, (ii) empirical standard, and (iii) interface for optimization. Our ultimate goal lies in facilitating transparent and reproducible experimentation with complex inference workflows, providing integrated pathways for (1) personalized prediction, (2) treatment-effect estimation, and (3) information acquisition. Through illustrative examples on real-world data in outpatient, general wards, and intensive-care settings, we illustrate the applicability of the pipeline paradigm on core tasks in the healthcare journey. To the best of our knowledge, Clairvoyance is the first to demonstrate viability of a comprehensive and automatable pipeline for clinical time-series ML.
Inverse Decision Modeling: Learning Interpretable Representations of Behavior
Oct 28, 2023


Decision analysis deals with modeling and enhancing decision processes. A principal challenge in improving behavior is in obtaining a transparent description of existing behavior in the first place. In this paper, we develop an expressive, unifying perspective on inverse decision modeling: a framework for learning parameterized representations of sequential decision behavior. First, we formalize the forward problem (as a normative standard), subsuming common classes of control behavior. Second, we use this to formalize the inverse problem (as a descriptive model), generalizing existing work on imitation/reward learning -- while opening up a much broader class of research problems in behavior representation. Finally, we instantiate this approach with an example (inverse bounded rational control), illustrating how this structure enables learning (interpretable) representations of (bounded) rationality -- while naturally capturing intuitive notions of suboptimal actions, biased beliefs, and imperfect knowledge of environments.
Accountability in Offline Reinforcement Learning: Explaining Decisions with a Corpus of Examples
Oct 11, 2023



Learning transparent, interpretable controllers with offline data in decision-making systems is an essential area of research due to its potential to reduce the risk of applications in real-world systems. However, in responsibility-sensitive settings such as healthcare, decision accountability is of paramount importance, yet has not been adequately addressed by the literature. This paper introduces the Accountable Offline Controller (AOC) that employs the offline dataset as the Decision Corpus and performs accountable control based on a tailored selection of examples, referred to as the Corpus Subset. ABC operates effectively in low-data scenarios, can be extended to the strictly offline imitation setting, and displays qualities of both conservation and adaptability. We assess ABC's performance in both simulated and real-world healthcare scenarios, emphasizing its capability to manage offline control tasks with high levels of performance while maintaining accountability. Keywords: Interpretable Reinforcement Learning, Explainable Reinforcement Learning, Reinforcement Learning Transparency, Offline Reinforcement Learning, Batched Control.
Curiosity in hindsight
Nov 18, 2022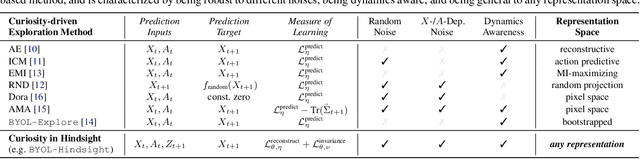
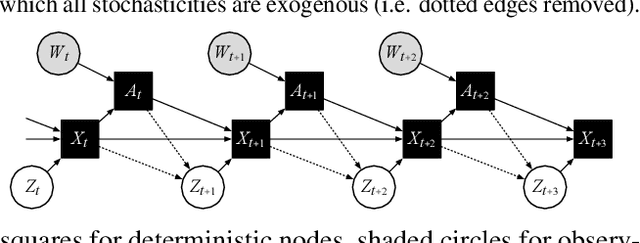
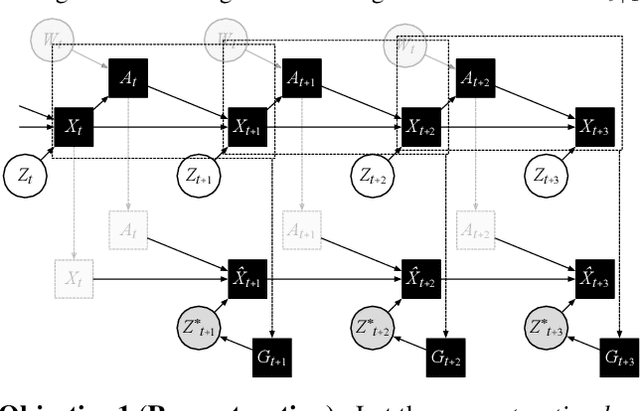
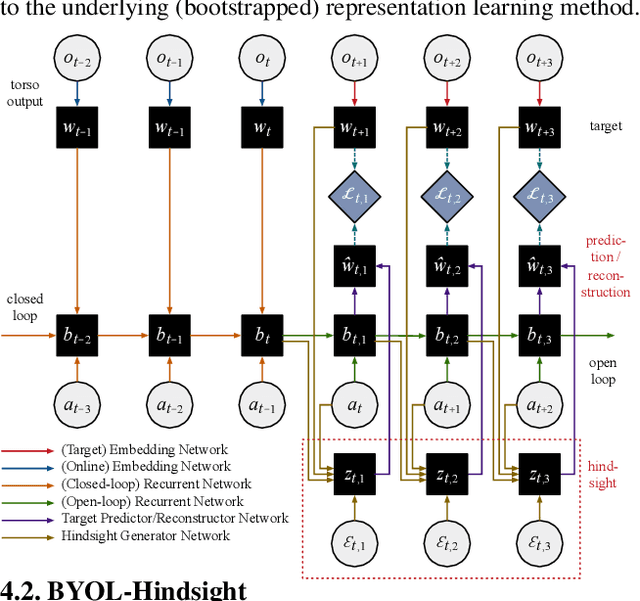
Consider the exploration in sparse-reward or reward-free environments, such as Montezuma's Revenge. The curiosity-driven paradigm dictates an intuitive technique: At each step, the agent is rewarded for how much the realized outcome differs from their predicted outcome. However, using predictive error as intrinsic motivation is prone to fail in stochastic environments, as the agent may become hopelessly drawn to high-entropy areas of the state-action space, such as a noisy TV. Therefore it is important to distinguish between aspects of world dynamics that are inherently predictable and aspects that are inherently unpredictable: The former should constitute a source of intrinsic reward, whereas the latter should not. In this work, we study a natural solution derived from structural causal models of the world: Our key idea is to learn representations of the future that capture precisely the unpredictable aspects of each outcome -- not any more, not any less -- which we use as additional input for predictions, such that intrinsic rewards do vanish in the limit. First, we propose incorporating such hindsight representations into the agent's model to disentangle "noise" from "novelty", yielding Curiosity in Hindsight: a simple and scalable generalization of curiosity that is robust to all types of stochasticity. Second, we implement this framework as a drop-in modification of any prediction-based exploration bonus, and instantiate it for the recently introduced BYOL-Explore algorithm as a prime example, resulting in the noise-robust "BYOL-Hindsight". Third, we illustrate its behavior under various stochasticities in a grid world, and find improvements over BYOL-Explore in hard-exploration Atari games with sticky actions. Importantly, we show SOTA results in exploring Montezuma with sticky actions, while preserving performance in the non-sticky setting.
HyperImpute: Generalized Iterative Imputation with Automatic Model Selection
Jun 15, 2022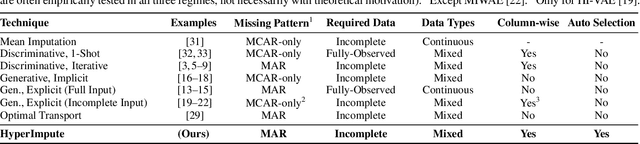

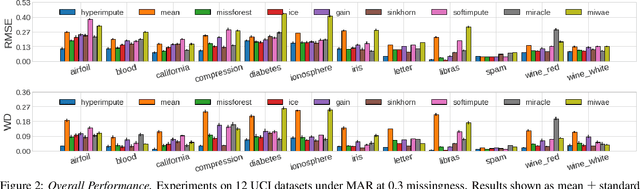
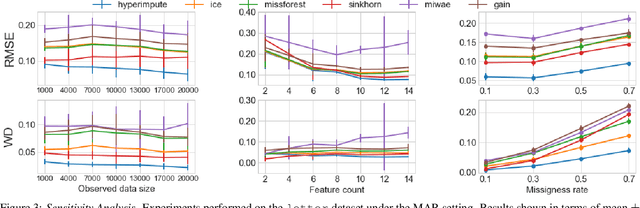
Consider the problem of imputing missing values in a dataset. One the one hand, conventional approaches using iterative imputation benefit from the simplicity and customizability of learning conditional distributions directly, but suffer from the practical requirement for appropriate model specification of each and every variable. On the other hand, recent methods using deep generative modeling benefit from the capacity and efficiency of learning with neural network function approximators, but are often difficult to optimize and rely on stronger data assumptions. In this work, we study an approach that marries the advantages of both: We propose *HyperImpute*, a generalized iterative imputation framework for adaptively and automatically configuring column-wise models and their hyperparameters. Practically, we provide a concrete implementation with out-of-the-box learners, optimizers, simulators, and extensible interfaces. Empirically, we investigate this framework via comprehensive experiments and sensitivities on a variety of public datasets, and demonstrate its ability to generate accurate imputations relative to a strong suite of benchmarks. Contrary to recent work, we believe our findings constitute a strong defense of the iterative imputation paradigm.