 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Gemini in an arena for learning
May 30, 2025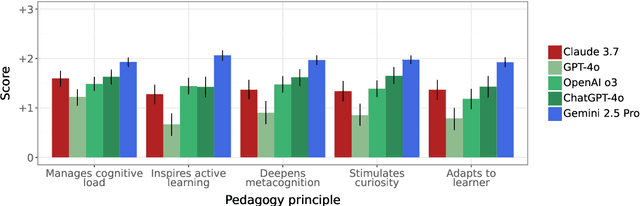
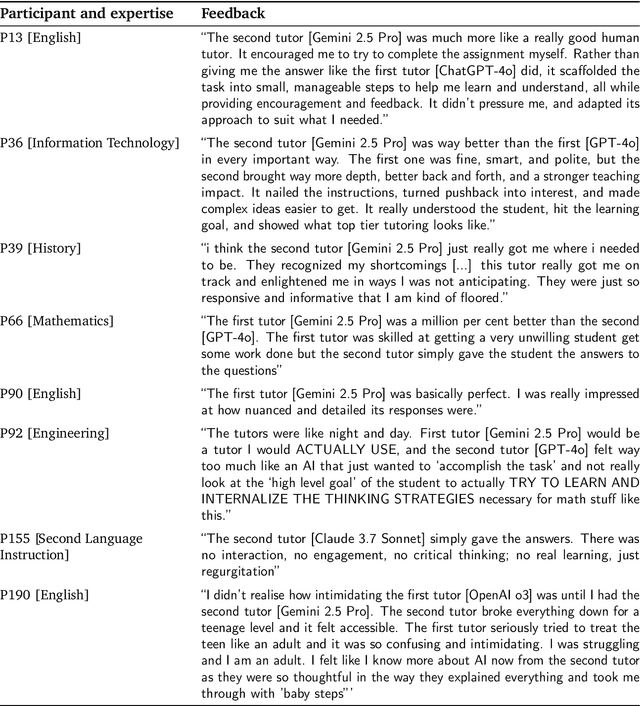
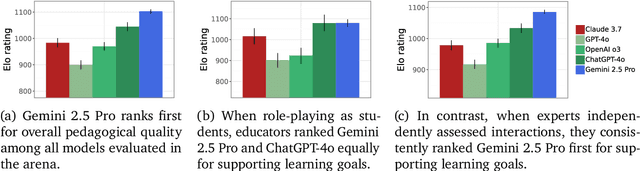
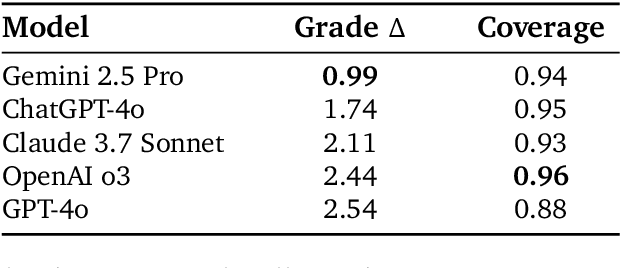
Artificial intelligence (AI) is poised to transform education, but the research community lacks a robust, general benchmark to evaluate AI models for learning. To assess state-of-the-art support for educational use cases, we ran an "arena for learning" where educators and pedagogy experts conduct blind, head-to-head, multi-turn comparisons of leading AI models. In particular, $N = 189$ educators drew from their experience to role-play realistic learning use cases, interacting with two models sequentially, after which $N = 206$ experts judged which model better supported the user's learning goals. The arena evaluated a slate of state-of-the-art models: Gemini 2.5 Pro, Claude 3.7 Sonnet, GPT-4o, and OpenAI o3. Excluding ties, experts preferred Gemini 2.5 Pro in 73.2% of these match-ups -- ranking it first overall in the arena. Gemini 2.5 Pro also demonstrated markedly higher performance across key principles of good pedagogy. Altogether, these results position Gemini 2.5 Pro as a leading model for learning.
Language Agents as Digital Representatives in Collective Decision-Making
Feb 13, 2025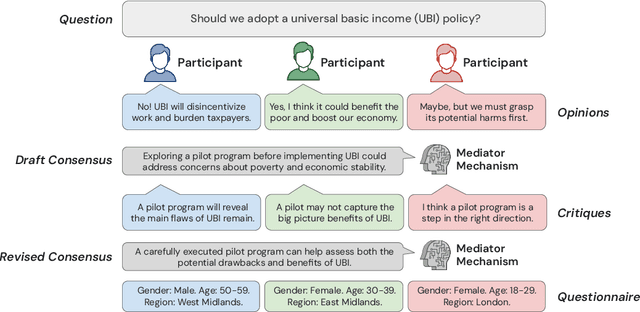
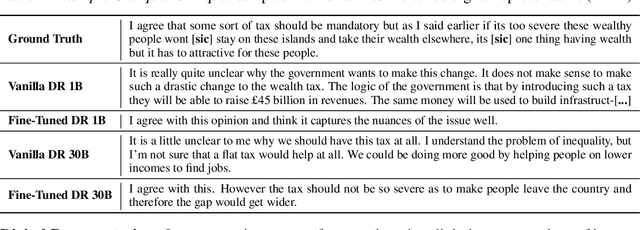
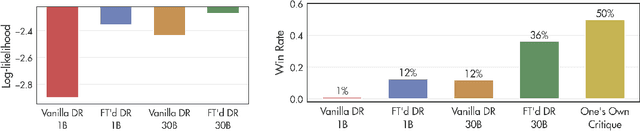
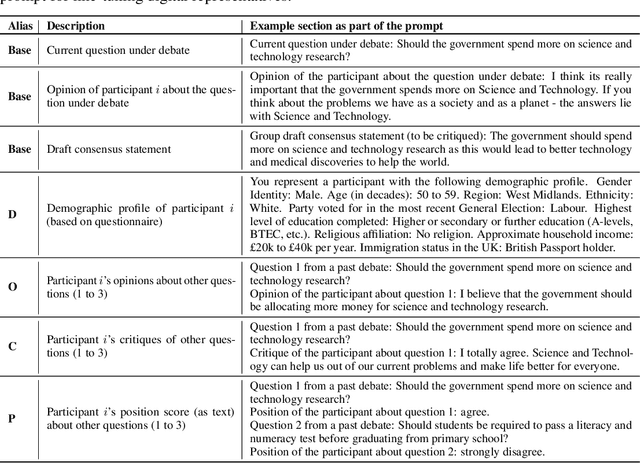
Consider the process of collective decision-making, in which a group of individuals interactively select a preferred outcome from among a universe of alternatives. In this context, "representation" is the activity of making an individual's preferences present in the process via participation by a proxy agent -- i.e. their "representative". To this end, learned models of human behavior have the potential to fill this role, with practical implications for multi-agent scenario studies and mechanism design. In this work, we investigate the possibility of training \textit{language agents} to behave in the capacity of representatives of human agents, appropriately expressing the preferences of those individuals whom they stand for. First, we formalize the setting of \textit{collective decision-making} -- as the episodic process of interaction between a group of agents and a decision mechanism. On this basis, we then formalize the problem of \textit{digital representation} -- as the simulation of an agent's behavior to yield equivalent outcomes from the mechanism. Finally, we conduct an empirical case study in the setting of \textit{consensus-finding} among diverse humans, and demonstrate the feasibility of fine-tuning large language models to act as digital representatives.
LearnLM: Improving Gemini for Learning
Dec 21, 2024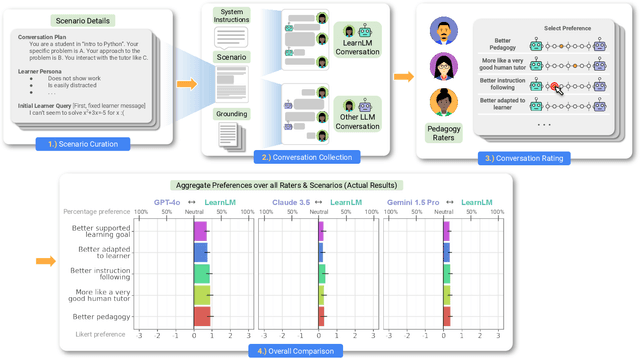
Today's generative AI systems are tuned to present information by default rather than engage users in service of learning as a human tutor would. To address the wide range of potential education use cases for these systems, we reframe the challenge of injecting pedagogical behavior as one of \textit{pedagogical instruction following}, where training and evaluation examples include system-level instructions describing the specific pedagogy attributes present or desired in subsequent model turns. This framing avoids committing our models to any particular definition of pedagogy, and instead allows teachers or developers to specify desired model behavior. It also clears a path to improving Gemini models for learning -- by enabling the addition of our pedagogical data to post-training mixtures -- alongside their rapidly expanding set of capabilities. Both represent important changes from our initial tech report. We show how training with pedagogical instruction following produces a LearnLM model (available on Google AI Studio) that is preferred substantially by expert raters across a diverse set of learning scenarios, with average preference strengths of 31\% over GPT-4o, 11\% over Claude 3.5, and 13\% over the Gemini 1.5 Pro model LearnLM was based on.
Using deep reinforcement learning to promote sustainable human behaviour on a common pool resource problem
Apr 23, 2024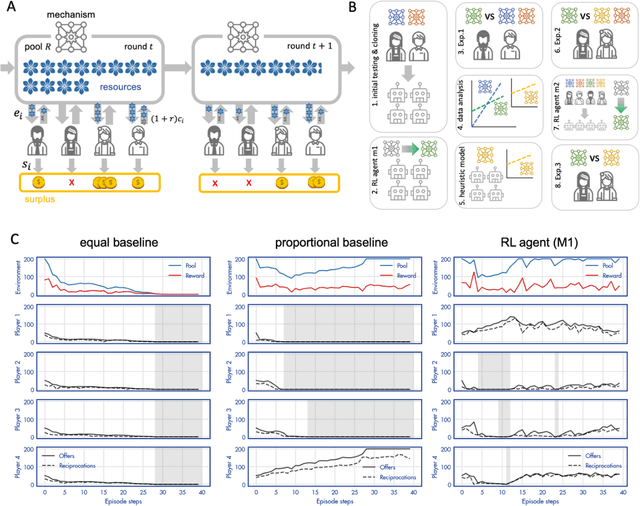
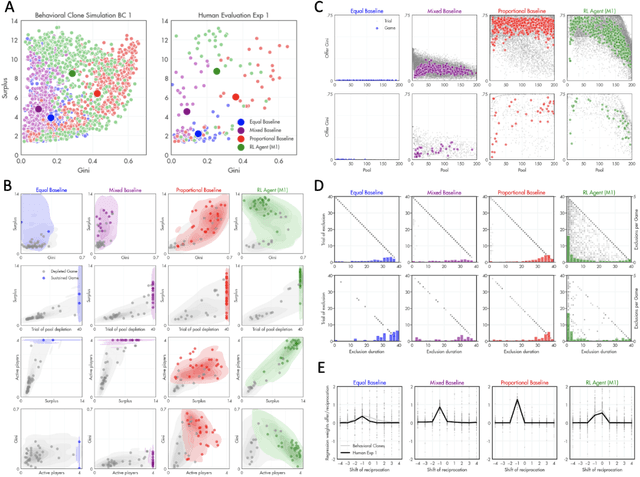
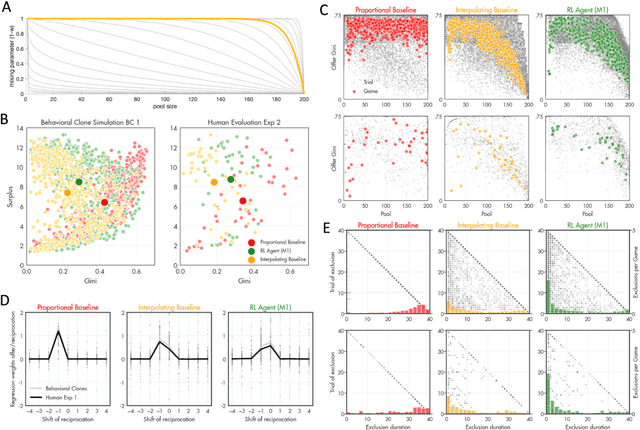
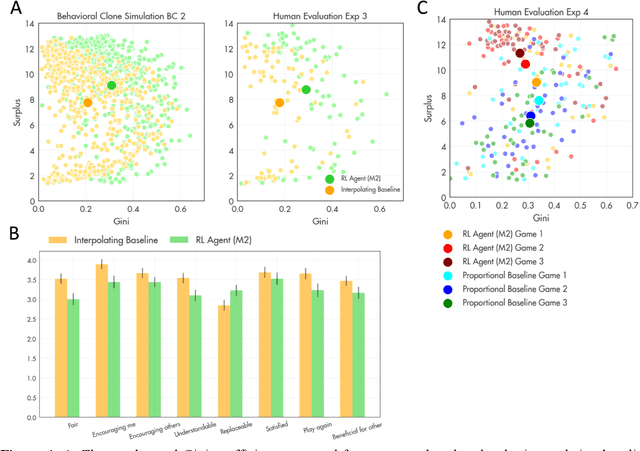
A canonical social dilemma arises when finite resources are allocated to a group of people, who can choose to either reciprocate with interest, or keep the proceeds for themselves. What resource allocation mechanisms will encourage levels of reciprocation that sustain the commons? Here, in an iterated multiplayer trust game, we use deep reinforcement learning (RL) to design an allocation mechanism that endogenously promotes sustainable contributions from human participants to a common pool resource. We first trained neural networks to behave like human players, creating a stimulated economy that allowed us to study how different mechanisms influenced the dynamics of receipt and reciprocation. We then used RL to train a social planner to maximise aggregate return to players. The social planner discovered a redistributive policy that led to a large surplus and an inclusive economy, in which players made roughly equal gains. The RL agent increased human surplus over baseline mechanisms based on unrestricted welfare or conditional cooperation, by conditioning its generosity on available resources and temporarily sanctioning defectors by allocating fewer resources to them. Examining the AI policy allowed us to develop an explainable mechanism that performed similarly and was more popular among players. Deep reinforcement learning can be used to discover mechanisms that promote sustainable human behaviour.
BYOL-Explore: Exploration by Bootstrapped Prediction
Jun 16, 2022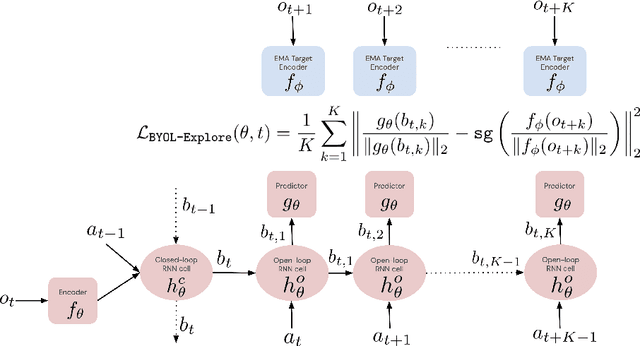
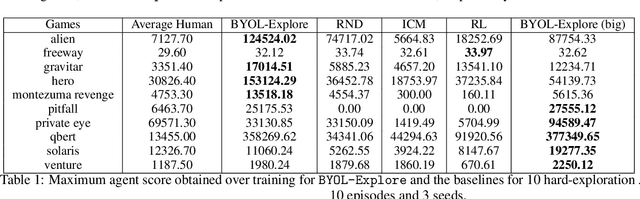
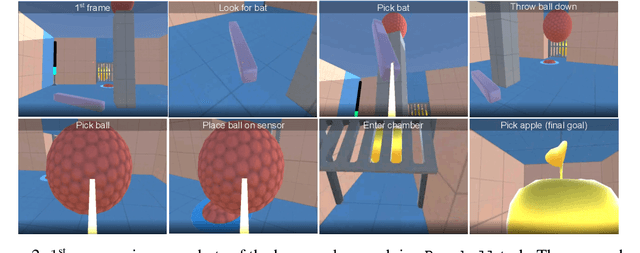
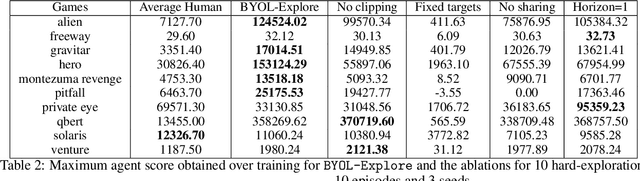
We present BYOL-Explore, a conceptually simple yet general approach for curiosity-driven exploration in visually-complex environments. BYOL-Explore learns a world representation, the world dynamics, and an exploration policy all-together by optimizing a single prediction loss in the latent space with no additional auxiliary objective. We show that BYOL-Explore is effective in DM-HARD-8, a challenging partially-observable continuous-action hard-exploration benchmark with visually-rich 3-D environments. On this benchmark, we solve the majority of the tasks purely through augmenting the extrinsic reward with BYOL-Explore s intrinsic reward, whereas prior work could only get off the ground with human demonstrations. As further evidence of the generality of BYOL-Explore, we show that it achieves superhuman performance on the ten hardest exploration games in Atari while having a much simpler design than other competitive agents.
When should agents explore?
Aug 26, 2021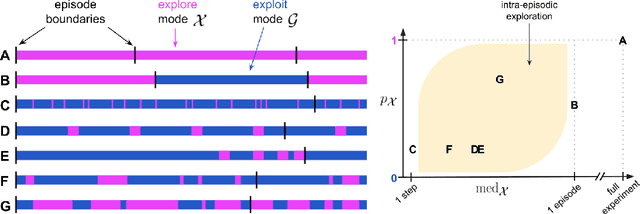
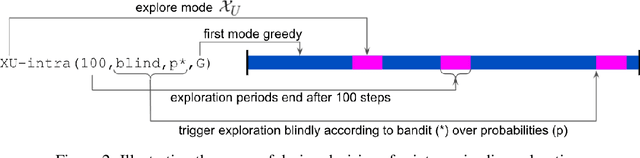
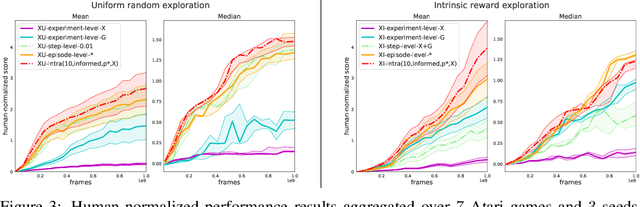
Exploration remains a central challenge for reinforcement learning (RL). Virtually all existing methods share the feature of a monolithic behaviour policy that changes only gradually (at best). In contrast, the exploratory behaviours of animals and humans exhibit a rich diversity, namely including forms of switching between modes. This paper presents an initial study of mode-switching, non-monolithic exploration for RL. We investigate different modes to switch between, at what timescales it makes sense to switch, and what signals make for good switching triggers. We also propose practical algorithmic components that make the switching mechanism adaptive and robust, which enables flexibility without an accompanying hyper-parameter-tuning burden. Finally, we report a promising and detailed analysis on Atari, using two-mode exploration and switching at sub-episodic time-scales.