 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Theory of Appropriateness That Accounts for Norms of Rationality
Mar 14, 2026We propose a society-first theory of normative appropriateness where individuals, modeled as pre-trained actors with cognitive architectures analogous to Large Language Models (LLMs), generate behavior via predictive pattern completion. Our theory posits that individuals act by completing distributed symbolic patterns based on context, answering questions such as "What does a person such as I do in a situation such as this?". This sense-making mechanism provides a parsimonious account of the key features of human norms: their context-dependence, arbitrariness, automaticity, dynamism, and their support from social sanctioning. It challenges rational-choice theories of social norms by accounting for their key features without needing to exogenously posit scalar rewards or preference relations. By distinguishing between explicit norms, which we associate with in-context adaptation, and implicit norms, which we associate with long-term memory, the theory reconceptualizes several foundational ideas in cognitive science. In particular, it gives an alternative account to the data traditionally seen as supporting dual-process models, and it flips the role of rationality, allowing us to construe it as adherence to culturally-contingent justification standards.
Can AI mediation improve democratic deliberation?
Jan 09, 2026The strength of democracy lies in the free and equal exchange of diverse viewpoints. Living up to this ideal at scale faces inherent tensions: broad participation, meaningful deliberation, and political equality often trade off with one another (Fishkin, 2011). We ask whether and how artificial intelligence (AI) could help navigate this "trilemma" by engaging with a recent example of a large language model (LLM)-based system designed to help people with diverse viewpoints find common ground (Tessler, Bakker, et al., 2024). Here, we explore the implications of the introduction of LLMs into deliberation augmentation tools, examining their potential to enhance participation through scalability, improve political equality via fair mediation, and foster meaningful deliberation by, for example, surfacing trustworthy information. We also point to key challenges that remain. Ultimately, a range of empirical, technical, and theoretical advancements are needed to fully realize the promise of AI-mediated deliberation for enhancing citizen engagement and strengthening democratic deliberation.
A theory of appropriateness with applications to generative artificial intelligence
Dec 26, 2024

What is appropriateness? Humans navigate a multi-scale mosaic of interlocking notions of what is appropriate for different situations. We act one way with our friends, another with our family, and yet another in the office. Likewise for AI, appropriate behavior for a comedy-writing assistant is not the same as appropriate behavior for a customer-service representative. What determines which actions are appropriate in which contexts? And what causes these standards to change over time? Since all judgments of AI appropriateness are ultimately made by humans, we need to understand how appropriateness guides human decision making in order to properly evaluate AI decision making and improve it. This paper presents a theory of appropriateness: how it functions in human society, how it may be implemented in the brain, and what it means for responsible deployment of generative AI technology.
Using deep reinforcement learning to promote sustainable human behaviour on a common pool resource problem
Apr 23, 2024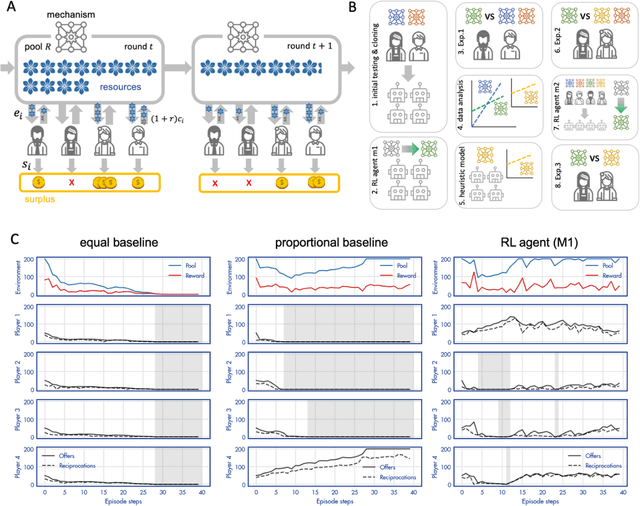
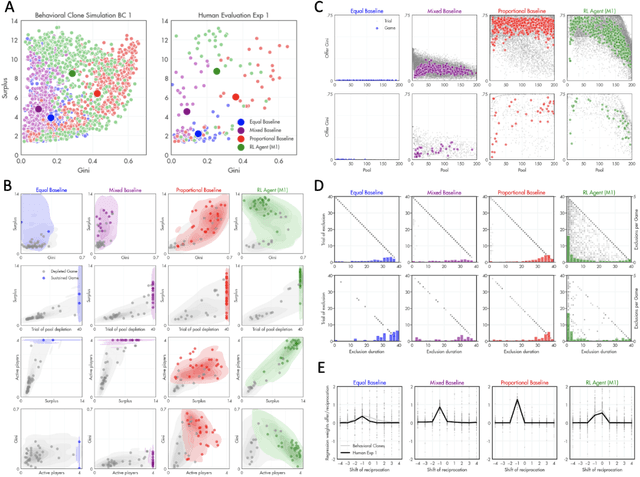
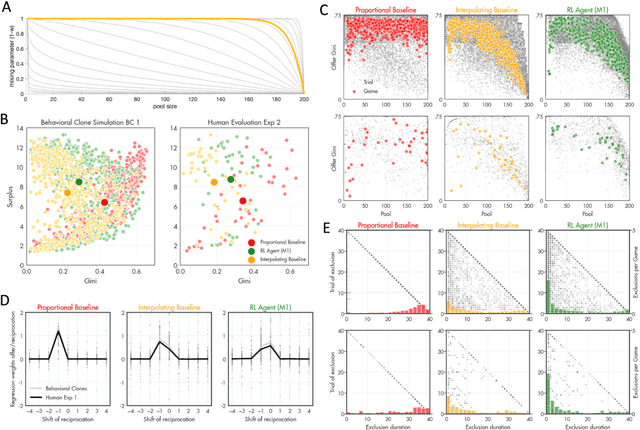
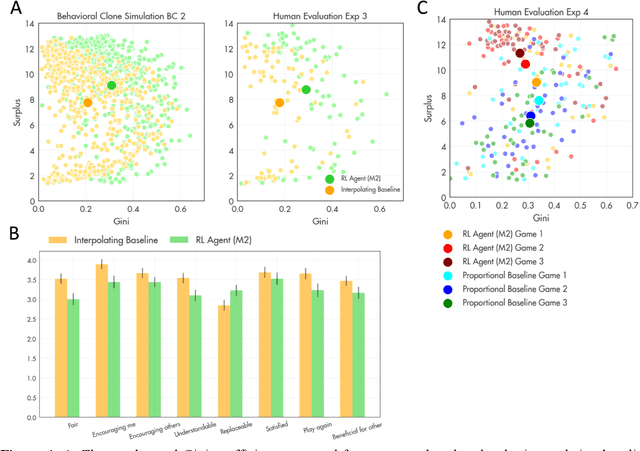
A canonical social dilemma arises when finite resources are allocated to a group of people, who can choose to either reciprocate with interest, or keep the proceeds for themselves. What resource allocation mechanisms will encourage levels of reciprocation that sustain the commons? Here, in an iterated multiplayer trust game, we use deep reinforcement learning (RL) to design an allocation mechanism that endogenously promotes sustainable contributions from human participants to a common pool resource. We first trained neural networks to behave like human players, creating a stimulated economy that allowed us to study how different mechanisms influenced the dynamics of receipt and reciprocation. We then used RL to train a social planner to maximise aggregate return to players. The social planner discovered a redistributive policy that led to a large surplus and an inclusive economy, in which players made roughly equal gains. The RL agent increased human surplus over baseline mechanisms based on unrestricted welfare or conditional cooperation, by conditioning its generosity on available resources and temporarily sanctioning defectors by allocating fewer resources to them. Examining the AI policy allowed us to develop an explainable mechanism that performed similarly and was more popular among players. Deep reinforcement learning can be used to discover mechanisms that promote sustainable human behaviour.
Perception Test: A Diagnostic Benchmark for Multimodal Video Models
May 23, 2023


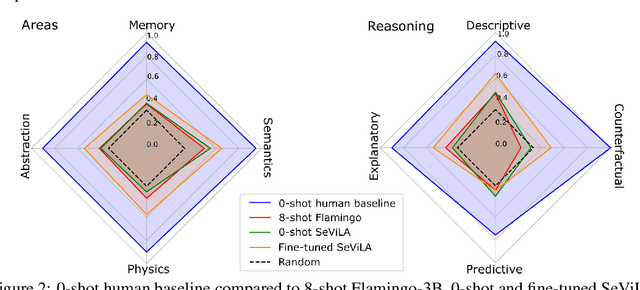
We propose a novel multimodal video benchmark - the Perception Test - to evaluate the perception and reasoning skills of pre-trained multimodal models (e.g. Flamingo, BEiT-3, or GPT-4). Compared to existing benchmarks that focus on computational tasks (e.g. classification, detection or tracking), the Perception Test focuses on skills (Memory, Abstraction, Physics, Semantics) and types of reasoning (descriptive, explanatory, predictive, counterfactual) across video, audio, and text modalities, to provide a comprehensive and efficient evaluation tool. The benchmark probes pre-trained models for their transfer capabilities, in a zero-shot / few-shot or limited finetuning regime. For these purposes, the Perception Test introduces 11.6k real-world videos, 23s average length, designed to show perceptually interesting situations, filmed by around 100 participants worldwide. The videos are densely annotated with six types of labels (multiple-choice and grounded video question-answers, object and point tracks, temporal action and sound segments), enabling both language and non-language evaluations. The fine-tuning and validation splits of the benchmark are publicly available (CC-BY license), in addition to a challenge server with a held-out test split. Human baseline results compared to state-of-the-art video QA models show a significant gap in performance (91.4% vs 43.6%), suggesting that there is significant room for improvement in multimodal video understanding. Dataset, baselines code, and challenge server are available at https://github.com/deepmind/perception_test
The Good Shepherd: An Oracle Agent for Mechanism Design
Feb 21, 2022

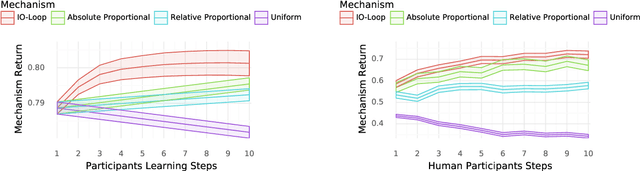
From social networks to traffic routing, artificial learning agents are playing a central role in modern institutions. We must therefore understand how to leverage these systems to foster outcomes and behaviors that align with our own values and aspirations. While multiagent learning has received considerable attention in recent years, artificial agents have been primarily evaluated when interacting with fixed, non-learning co-players. While this evaluation scheme has merit, it fails to capture the dynamics faced by institutions that must deal with adaptive and continually learning constituents. Here we address this limitation, and construct agents ("mechanisms") that perform well when evaluated over the learning trajectory of their adaptive co-players ("participants"). The algorithm we propose consists of two nested learning loops: an inner loop where participants learn to best respond to fixed mechanisms; and an outer loop where the mechanism agent updates its policy based on experience. We report the performance of our mechanism agents when paired with both artificial learning agents and humans as co-players. Our results show that our mechanisms are able to shepherd the participants strategies towards favorable outcomes, indicating a path for modern institutions to effectively and automatically influence the strategies and behaviors of their constituents.
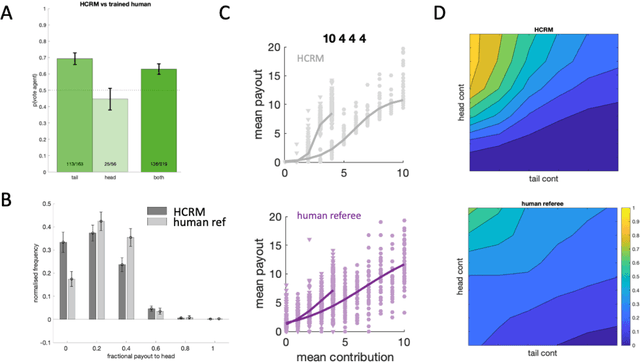
HCMD-zero: Learning Value Aligned Mechanisms from Data
Feb 21, 2022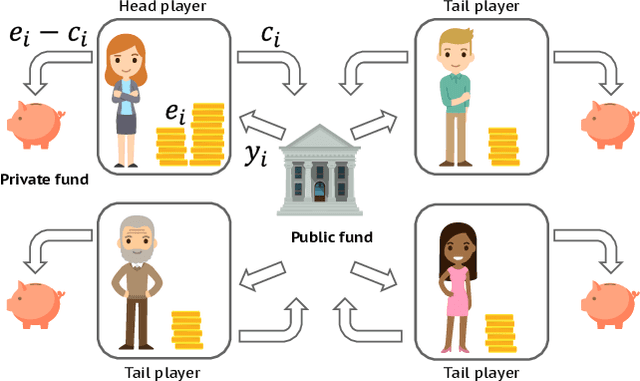

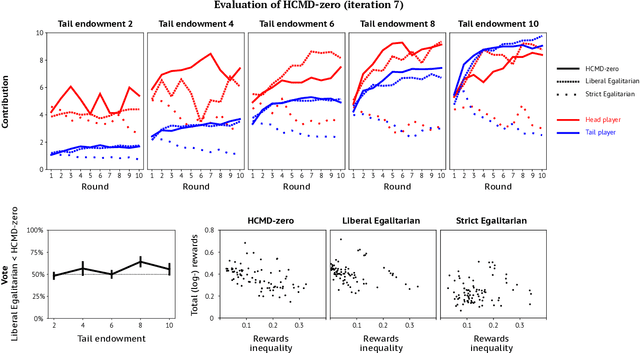
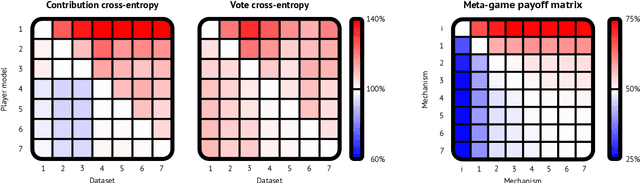
Artificial learning agents are mediating a larger and larger number of interactions among humans, firms, and organizations, and the intersection between mechanism design and machine learning has been heavily investigated in recent years. However, mechanism design methods make strong assumptions on how participants behave (e.g. rationality), or on the kind of knowledge designers have access to a priori (e.g. access to strong baseline mechanisms). Here we introduce HCMD-zero, a general purpose method to construct mechanism agents. HCMD-zero learns by mediating interactions among participants, while remaining engaged in an electoral contest with copies of itself, thereby accessing direct feedback from participants. Our results on the Public Investment Game, a stylized resource allocation game that highlights the tension between productivity, equality and the temptation to free-ride, show that HCMD-zero produces competitive mechanism agents that are consistently preferred by human participants over baseline alternatives, and does so automatically, without requiring human knowledge, and by using human data sparingly and effectively Our detailed analysis shows HCMD-zero elicits consistent improvements over the course of training, and that it results in a mechanism with an interpretable and intuitive policy.
Human-centered mechanism design with Democratic AI
Jan 27, 2022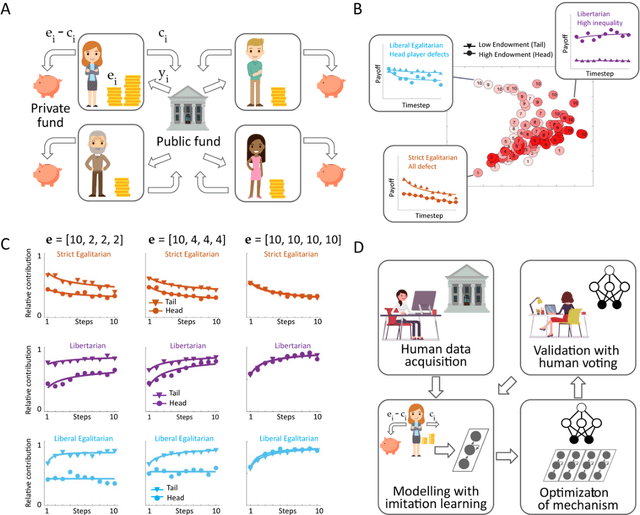
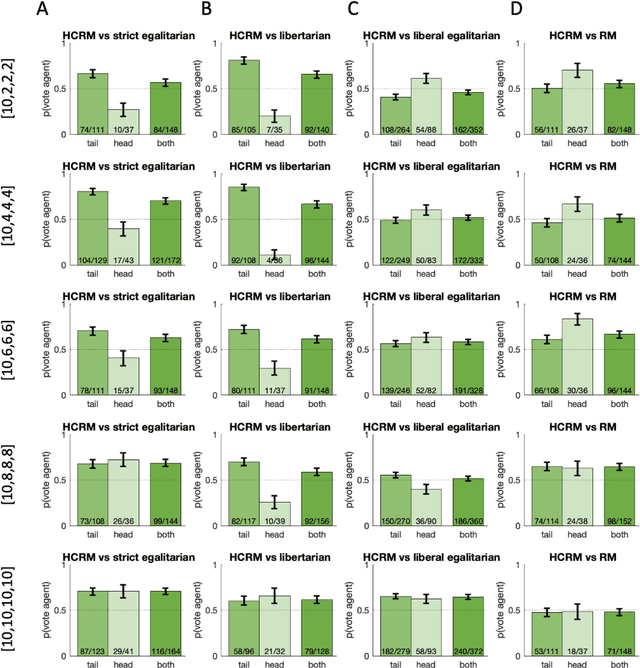
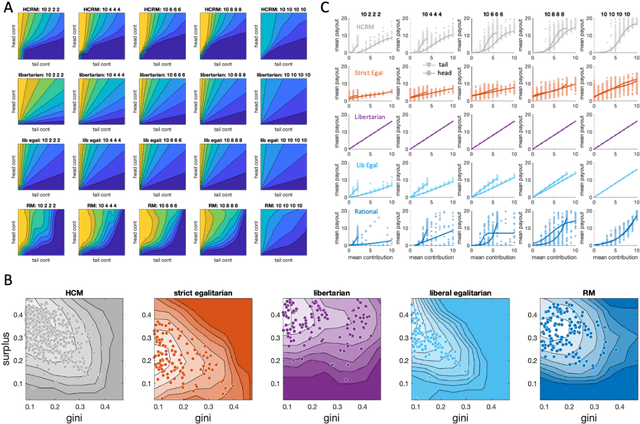
Building artificial intelligence (AI) that aligns with human values is an unsolved problem. Here, we developed a human-in-the-loop research pipeline called Democratic AI, in which reinforcement learning is used to design a social mechanism that humans prefer by majority. A large group of humans played an online investment game that involved deciding whether to keep a monetary endowment or to share it with others for collective benefit. Shared revenue was returned to players under two different redistribution mechanisms, one designed by the AI and the other by humans. The AI discovered a mechanism that redressed initial wealth imbalance, sanctioned free riders, and successfully won the majority vote. By optimizing for human preferences, Democratic AI may be a promising method for value-aligned policy innovation.
Role of Human-AI Interaction in Selective Prediction
Dec 13, 2021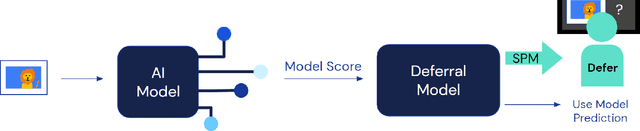
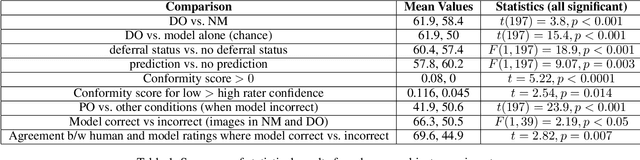

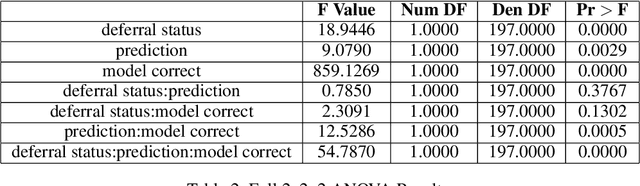
Recent work has shown the potential benefit of selective prediction systems that can learn to defer to a human when the predictions of the AI are unreliable, particularly to improve the reliability of AI systems in high-stakes applications like healthcare or conservation. However, most prior work assumes that human behavior remains unchanged when they solve a prediction task as part of a human-AI team as opposed to by themselves. We show that this is not the case by performing experiments to quantify human-AI interaction in the context of selective prediction. In particular, we study the impact of communicating different types of information to humans about the AI system's decision to defer. Using real-world conservation data and a selective prediction system that improves expected accuracy over that of the human or AI system working individually, we show that this messaging has a significant impact on the accuracy of human judgements. Our results study two components of the messaging strategy: 1) Whether humans are informed about the prediction of the AI system and 2) Whether they are informed about the decision of the selective prediction system to defer. By manipulating these messaging components, we show that it is possible to significantly boost human performance by informing the human of the decision to defer, but not revealing the prediction of the AI. We therefore show that it is vital to consider how the decision to defer is communicated to a human when designing selective prediction systems, and that the composite accuracy of a human-AI team must be carefully evaluated using a human-in-the-loop framework.
Scalable Evaluation of Multi-Agent Reinforcement Learning with Melting Pot
Jul 14, 2021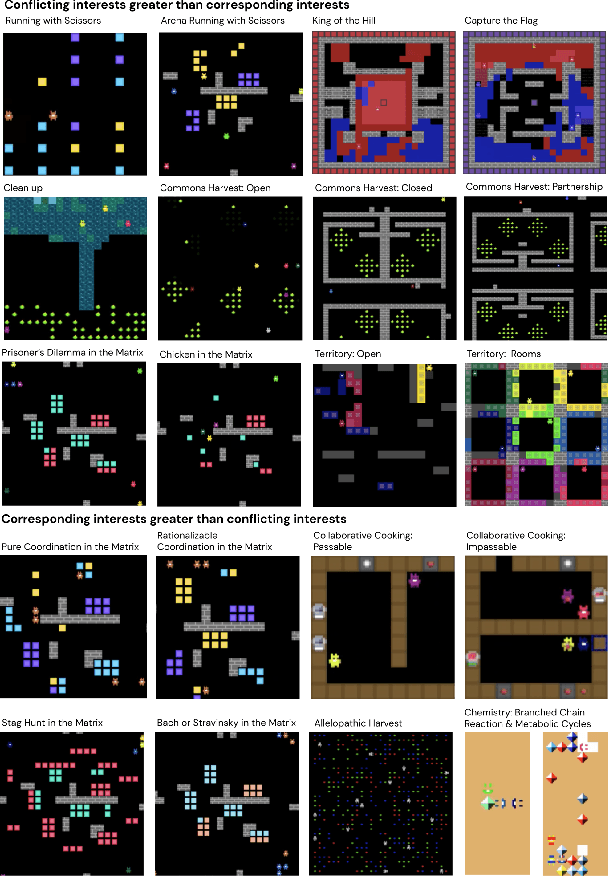
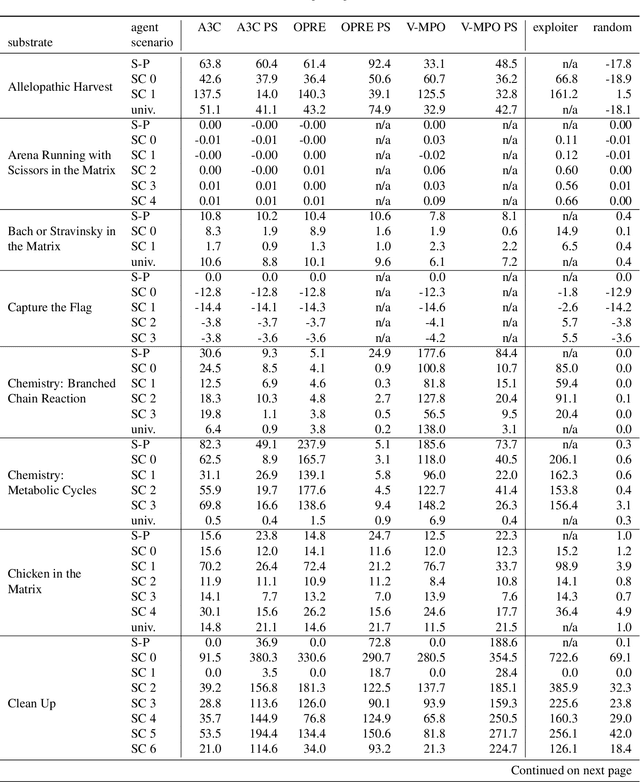
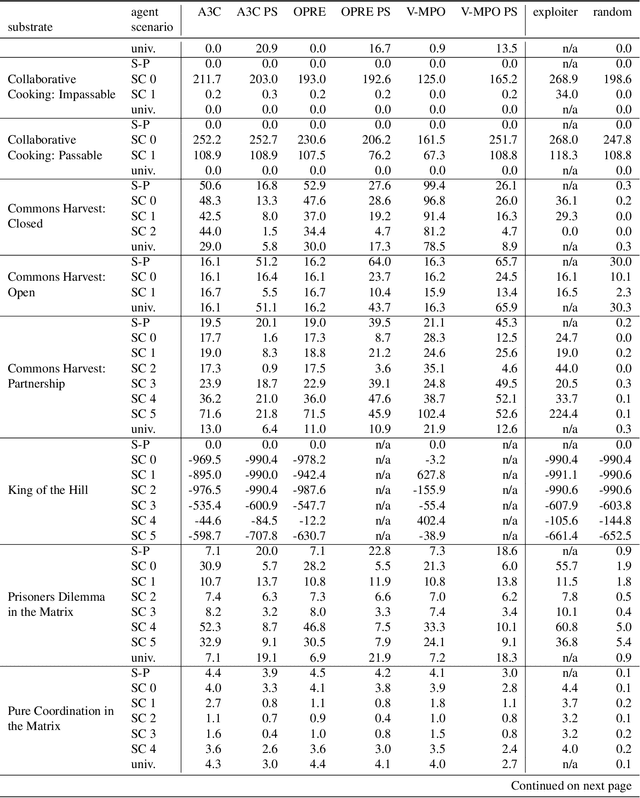
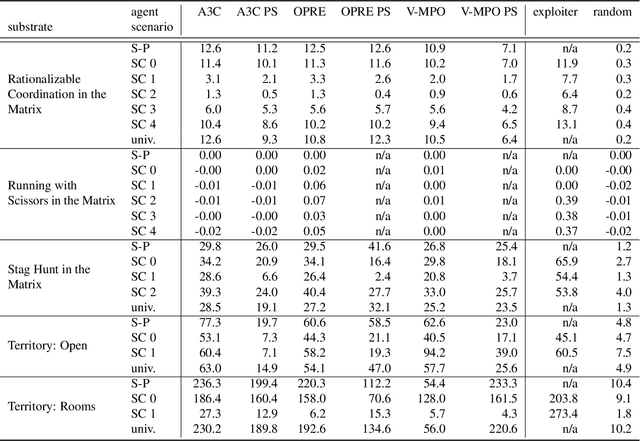
Existing evaluation suites for multi-agent reinforcement learning (MARL) do not assess generalization to novel situations as their primary objective (unlike supervised-learning benchmarks). Our contribution, Melting Pot, is a MARL evaluation suite that fills this gap, and uses reinforcement learning to reduce the human labor required to create novel test scenarios. This works because one agent's behavior constitutes (part of) another agent's environment. To demonstrate scalability, we have created over 80 unique test scenarios covering a broad range of research topics such as social dilemmas, reciprocity, resource sharing, and task partitioning. We apply these test scenarios to standard MARL training algorithms, and demonstrate how Melting Pot reveals weaknesses not apparent from training performance alone.
* Accepted to ICML 2021 and presented as a long talk; 33 pages; 9 figures