 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Model Bias Requires Characterizing its Mistakes
Jul 15, 2024



The ability to properly benchmark model performance in the face of spurious correlations is important to both build better predictors and increase confidence that models are operating as intended. We demonstrate that characterizing (as opposed to simply quantifying) model mistakes across subgroups is pivotal to properly reflect model biases, which are ignored by standard metrics such as worst-group accuracy or accuracy gap. Inspired by the hypothesis testing framework, we introduce SkewSize, a principled and flexible metric that captures bias from mistakes in a model's predictions. It can be used in multi-class settings or generalised to the open vocabulary setting of generative models. SkewSize is an aggregation of the effect size of the interaction between two categorical variables: the spurious variable representing the bias attribute and the model's prediction. We demonstrate the utility of SkewSize in multiple settings including: standard vision models trained on synthetic data, vision models trained on ImageNet, and large scale vision-and-language models from the BLIP-2 family. In each case, the proposed SkewSize is able to highlight biases not captured by other metrics, while also providing insights on the impact of recently proposed techniques, such as instruction tuning.
Generative models improve fairness of medical classifiers under distribution shifts
Apr 18, 2023A ubiquitous challenge in machine learning is the problem of domain generalisation. This can exacerbate bias against groups or labels that are underrepresented in the datasets used for model development. Model bias can lead to unintended harms, especially in safety-critical applications like healthcare. Furthermore, the challenge is compounded by the difficulty of obtaining labelled data due to high cost or lack of readily available domain expertise. In our work, we show that learning realistic augmentations automatically from data is possible in a label-efficient manner using generative models. In particular, we leverage the higher abundance of unlabelled data to capture the underlying data distribution of different conditions and subgroups for an imaging modality. By conditioning generative models on appropriate labels, we can steer the distribution of synthetic examples according to specific requirements. We demonstrate that these learned augmentations can surpass heuristic ones by making models more robust and statistically fair in- and out-of-distribution. To evaluate the generality of our approach, we study 3 distinct medical imaging contexts of varying difficulty: (i) histopathology images from a publicly available generalisation benchmark, (ii) chest X-rays from publicly available clinical datasets, and (iii) dermatology images characterised by complex shifts and imaging conditions. Complementing real training samples with synthetic ones improves the robustness of models in all three medical tasks and increases fairness by improving the accuracy of diagnosis within underrepresented groups. This approach leads to stark improvements OOD across modalities: 7.7% prediction accuracy improvement in histopathology, 5.2% in chest radiology with 44.6% lower fairness gap and a striking 63.5% improvement in high-risk sensitivity for dermatology with a 7.5x reduction in fairness gap.
Evaluating the Adversarial Robustness of Adaptive Test-time Defenses
Feb 28, 2022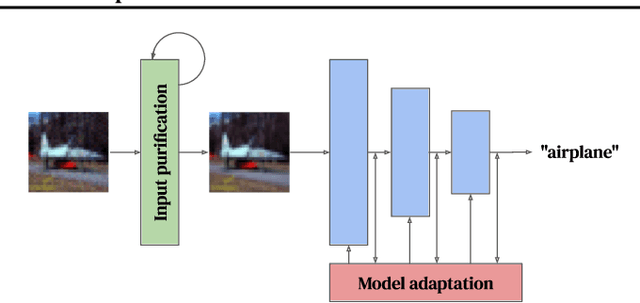

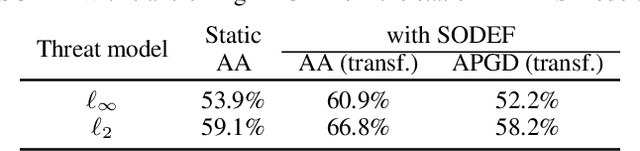

Adaptive defenses that use test-time optimization promise to improve robustness to adversarial examples. We categorize such adaptive test-time defenses and explain their potential benefits and drawbacks. In the process, we evaluate some of the latest proposed adaptive defenses (most of them published at peer-reviewed conferences). Unfortunately, none significantly improve upon static models when evaluated appropriately. Some even weaken the underlying static model while simultaneously increasing inference cost. While these results are disappointing, we still believe that adaptive test-time defenses are a promising avenue of research and, as such, we provide recommendations on evaluating such defenses. We go beyond the checklist provided by Carlini et al. (2019) by providing concrete steps that are specific to this type of defense.
Role of Human-AI Interaction in Selective Prediction
Dec 13, 2021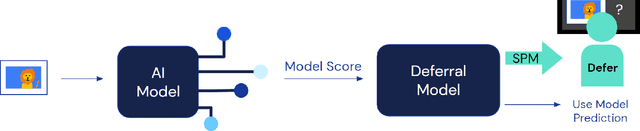
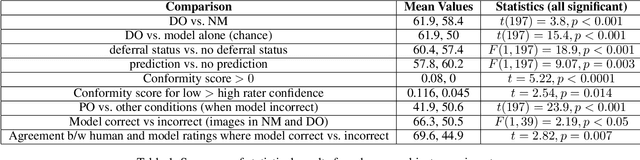

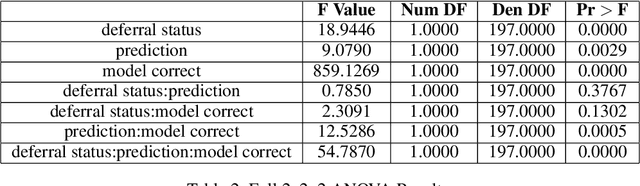
Recent work has shown the potential benefit of selective prediction systems that can learn to defer to a human when the predictions of the AI are unreliable, particularly to improve the reliability of AI systems in high-stakes applications like healthcare or conservation. However, most prior work assumes that human behavior remains unchanged when they solve a prediction task as part of a human-AI team as opposed to by themselves. We show that this is not the case by performing experiments to quantify human-AI interaction in the context of selective prediction. In particular, we study the impact of communicating different types of information to humans about the AI system's decision to defer. Using real-world conservation data and a selective prediction system that improves expected accuracy over that of the human or AI system working individually, we show that this messaging has a significant impact on the accuracy of human judgements. Our results study two components of the messaging strategy: 1) Whether humans are informed about the prediction of the AI system and 2) Whether they are informed about the decision of the selective prediction system to defer. By manipulating these messaging components, we show that it is possible to significantly boost human performance by informing the human of the decision to defer, but not revealing the prediction of the AI. We therefore show that it is vital to consider how the decision to defer is communicated to a human when designing selective prediction systems, and that the composite accuracy of a human-AI team must be carefully evaluated using a human-in-the-loop framework.
A Fine-Grained Analysis on Distribution Shift
Oct 21, 2021

Robustness to distribution shifts is critical for deploying machine learning models in the real world. Despite this necessity, there has been little work in defining the underlying mechanisms that cause these shifts and evaluating the robustness of algorithms across multiple, different distribution shifts. To this end, we introduce a framework that enables fine-grained analysis of various distribution shifts. We provide a holistic analysis of current state-of-the-art methods by evaluating 19 distinct methods grouped into five categories across both synthetic and real-world datasets. Overall, we train more than 85K models. Our experimental framework can be easily extended to include new methods, shifts, and datasets. We find, unlike previous work~\citep{Gulrajani20}, that progress has been made over a standard ERM baseline; in particular, pretraining and augmentations (learned or heuristic) offer large gains in many cases. However, the best methods are not consistent over different datasets and shifts.
Does Your Dermatology Classifier Know What It Doesn't Know? Detecting the Long-Tail of Unseen Conditions
Apr 08, 2021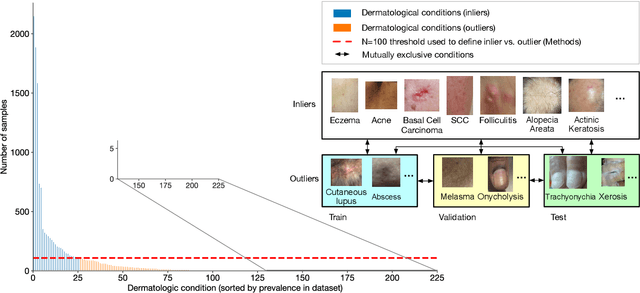
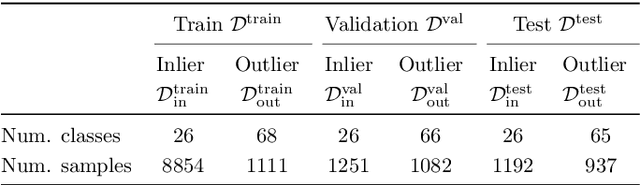
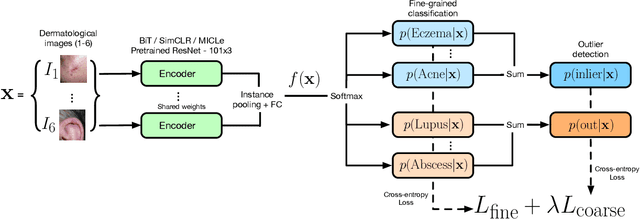
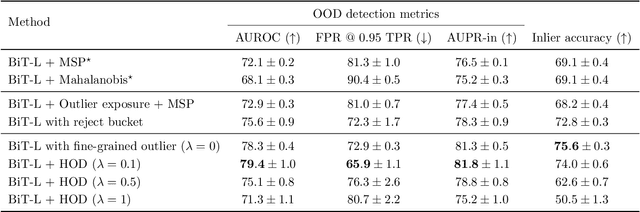
We develop and rigorously evaluate a deep learning based system that can accurately classify skin conditions while detecting rare conditions for which there is not enough data available for training a confident classifier. We frame this task as an out-of-distribution (OOD) detection problem. Our novel approach, hierarchical outlier detection (HOD) assigns multiple abstention classes for each training outlier class and jointly performs a coarse classification of inliers vs. outliers, along with fine-grained classification of the individual classes. We demonstrate the effectiveness of the HOD loss in conjunction with modern representation learning approaches (BiT, SimCLR, MICLe) and explore different ensembling strategies for further improving the results. We perform an extensive subgroup analysis over conditions of varying risk levels and different skin types to investigate how the OOD detection performance changes over each subgroup and demonstrate the gains of our framework in comparison to baselines. Finally, we introduce a cost metric to approximate downstream clinical impact. We use this cost metric to compare the proposed method against a baseline system, thereby making a stronger case for the overall system effectiveness in a real-world deployment scenario.
Unbiased Gradient Estimation for Variational Auto-Encoders using Coupled Markov Chains
Oct 05, 2020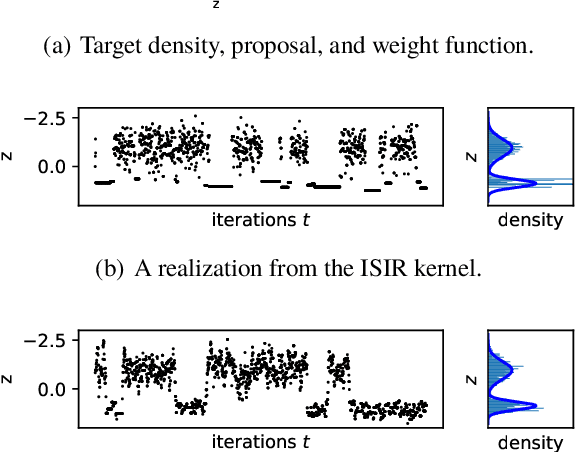
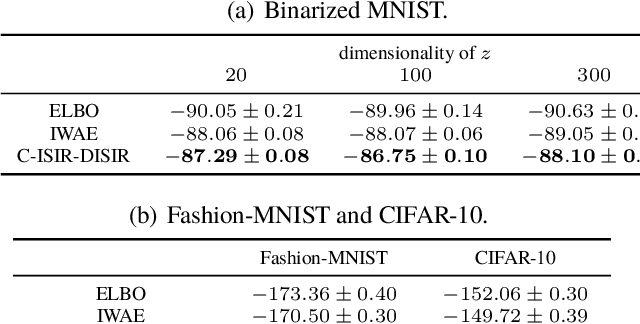
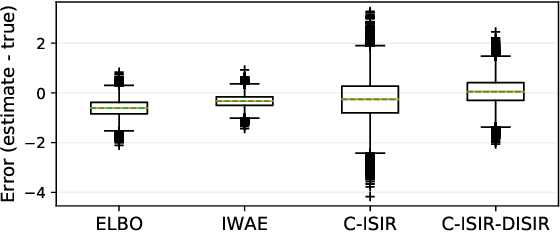
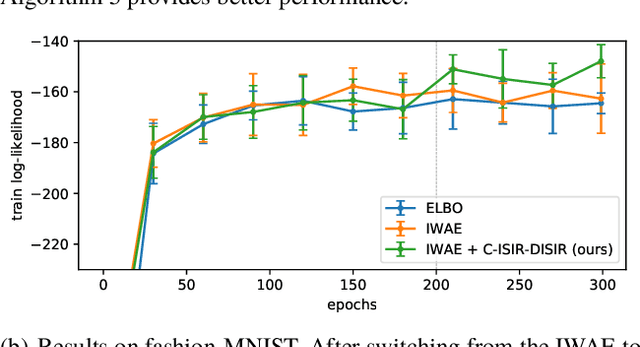
The variational auto-encoder (VAE) is a deep latent variable model that has two neural networks in an autoencoder-like architecture; one of them parameterizes the model's likelihood. Fitting its parameters via maximum likelihood is challenging since the computation of the likelihood involves an intractable integral over the latent space; thus the VAE is trained instead by maximizing a variational lower bound. Here, we develop a maximum likelihood training scheme for VAEs by introducing unbiased gradient estimators of the log-likelihood. We obtain the unbiased estimators by augmenting the latent space with a set of importance samples, similarly to the importance weighted auto-encoder (IWAE), and then constructing a Markov chain Monte Carlo (MCMC) coupling procedure on this augmented space. We provide the conditions under which the estimators can be computed in finite time and have finite variance. We demonstrate experimentally that VAEs fitted with unbiased estimators exhibit better predictive performance on three image datasets.
Contrastive Training for Improved Out-of-Distribution Detection
Jul 10, 2020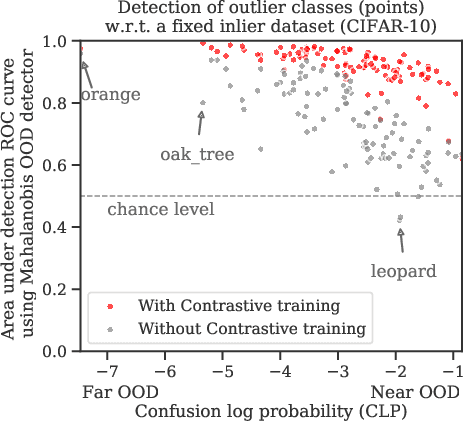
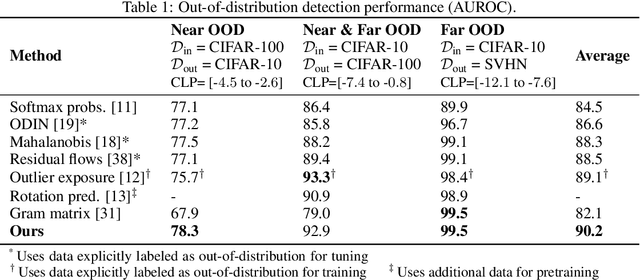
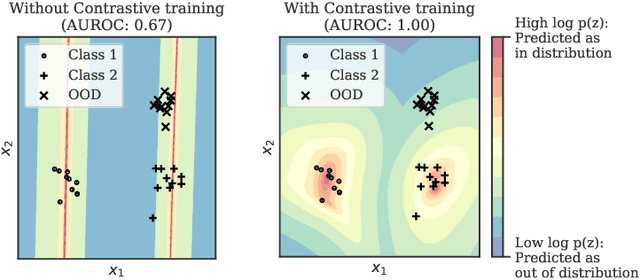
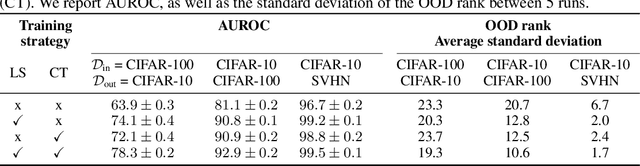
Reliable detection of out-of-distribution (OOD) inputs is increasingly understood to be a precondition for deployment of machine learning systems. This paper proposes and investigates the use of contrastive training to boost OOD detection performance. Unlike leading methods for OOD detection, our approach does not require access to examples labeled explicitly as OOD, which can be difficult to collect in practice. We show in extensive experiments that contrastive training significantly helps OOD detection performance on a number of common benchmarks. By introducing and employing the Confusion Log Probability (CLP) score, which quantifies the difficulty of the OOD detection task by capturing the similarity of inlier and outlier datasets, we show that our method especially improves performance in the `near OOD' classes -- a particularly challenging setting for previous methods.
Achieving Robustness in the Wild via Adversarial Mixing with Disentangled Representations
Dec 06, 2019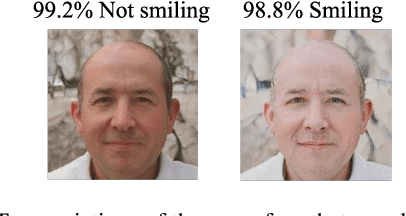
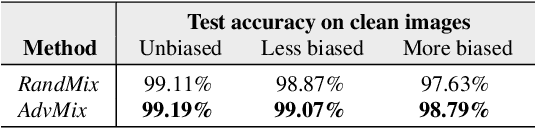
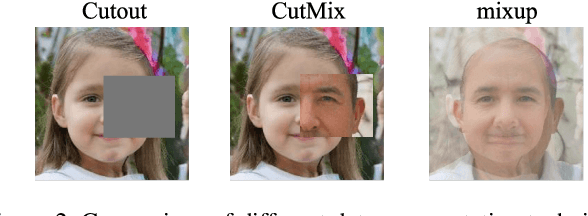
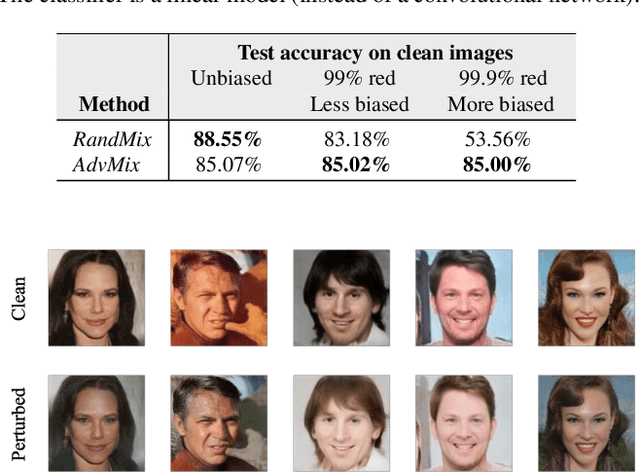
Recent research has made the surprising finding that state-of-the-art deep learning models sometimes fail to generalize to small variations of the input. Adversarial training has been shown to be an effective approach to overcome this problem. However, its application has been limited to enforcing invariance to analytically defined transformations like $\ell_p$-norm bounded perturbations. Such perturbations do not necessarily cover plausible real-world variations that preserve the semantics of the input (such as a change in lighting conditions). In this paper, we propose a novel approach to express and formalize robustness to these kinds of real-world transformations of the input. The two key ideas underlying our formulation are (1) leveraging disentangled representations of the input to define different factors of variations, and (2) generating new input images by adversarially composing the representations of different images. We use a StyleGAN model to demonstrate the efficacy of this framework. Specifically, we leverage the disentangled latent representations computed by a StyleGAN model to generate perturbations of an image that are similar to real-world variations (like adding make-up, or changing the skin-tone of a person) and train models to be invariant to these perturbations. Extensive experiments show that our method improves generalization and reduces the effect of spurious correlations.
EndoSensorFusion: Particle Filtering-Based Multi-sensory Data Fusion with Switching State-Space Model for Endoscopic Capsule Robots
Sep 25, 2017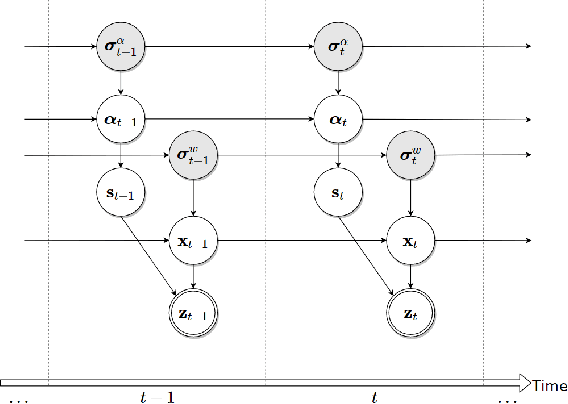
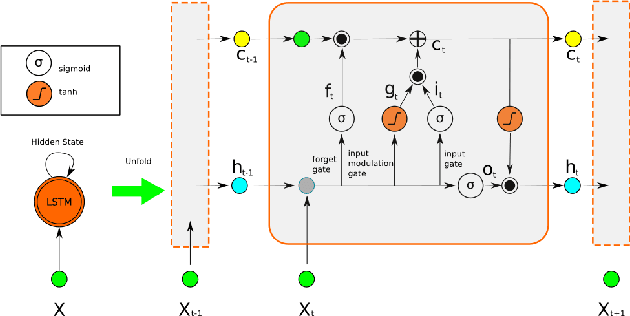
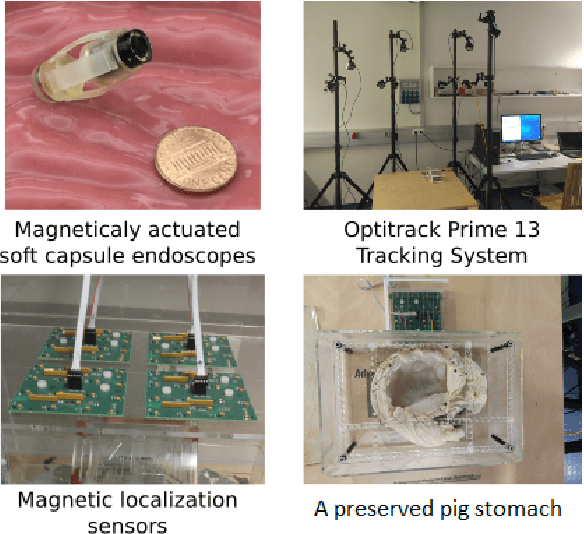
A reliable, real time multi-sensor fusion functionality is crucial for localization of actively controlled capsule endoscopy robots, which are an emerging, minimally invasive diagnostic and therapeutic technology for the gastrointestinal (GI) tract. In this study, we propose a novel multi-sensor fusion approach based on a particle filter that incorporates an online estimation of sensor reliability and a non-linear kinematic model learned by a recurrent neural network. Our method sequentially estimates the true robot pose from noisy pose observations delivered by multiple sensors. We experimentally test the method using 5 degree-of-freedom (5-DoF) absolute pose measurement by a magnetic localization system and a 6-DoF relative pose measurement by visual odometry. In addition, the proposed method is capable of detecting and handling sensor failures by ignoring corrupted data, providing the robustness expected of a medical device. Detailed analyses and evaluations are presented using ex-vivo experiments on a porcine stomach model prove that our system achieves high translational and rotational accuracies for different types of endoscopic capsule robot trajectories.