 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVR-Caps: A Virtual Environment for Capsule Endoscopy
Aug 29, 2020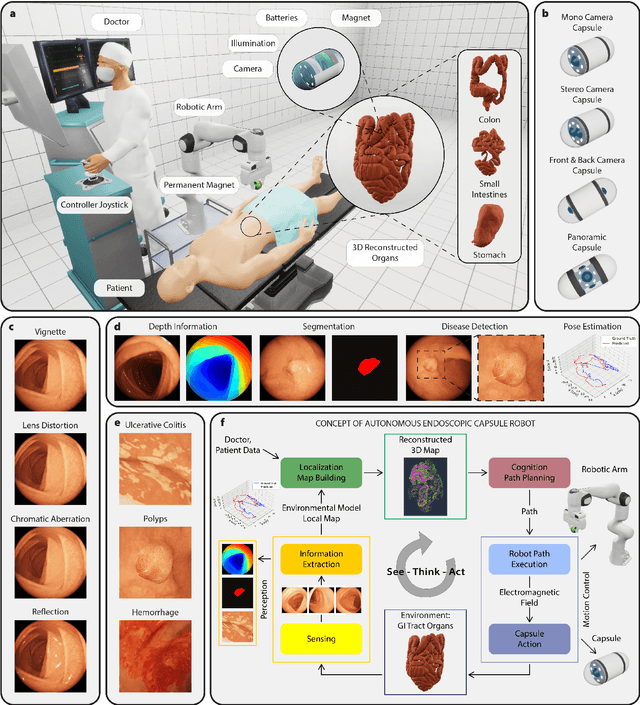
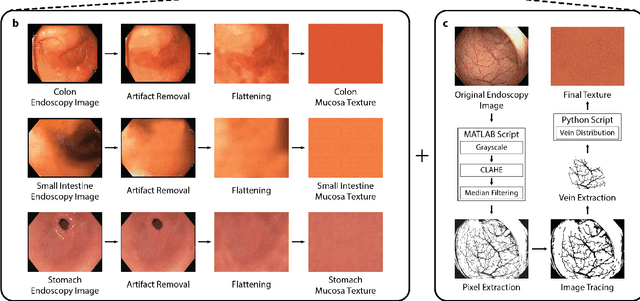
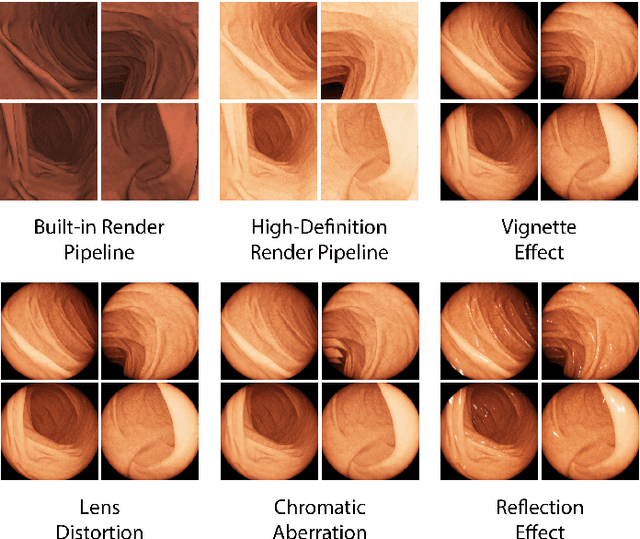
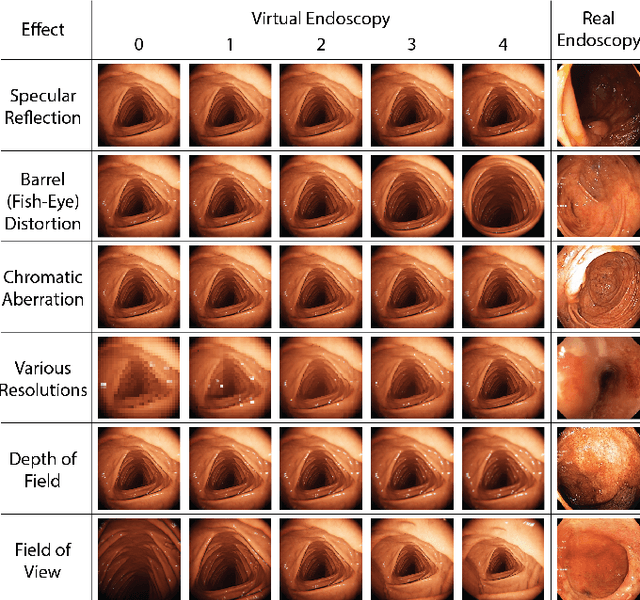
Current capsule endoscopes and next-generation robotic capsules for diagnosis and treatment of gastrointestinal diseases are complex cyber-physical platforms that must orchestrate complex software and hardware functions. The desired tasks for these systems include visual localization, depth estimation, 3D mapping, disease detection and segmentation, automated navigation, active control, path realization and optional therapeutic modules such as targeted drug delivery and biopsy sampling. Data-driven algorithms promise to enable many advanced functionalities for capsule endoscopes, but real-world data is challenging to obtain. Physically-realistic simulations providing synthetic data have emerged as a solution to the development of data-driven algorithms. In this work, we present a comprehensive simulation platform for capsule endoscopy operations and introduce VR-Caps, a virtual active capsule environment that simulates a range of normal and abnormal tissue conditions (e.g., inflated, dry, wet etc.) and varied organ types, capsule endoscope designs (e.g., mono, stereo, dual and 360{\deg}camera), and the type, number, strength, and placement of internal and external magnetic sources that enable active locomotion. VR-Caps makes it possible to both independently or jointly develop, optimize, and test medical imaging and analysis software for the current and next-generation endoscopic capsule systems. To validate this approach, we train state-of-the-art deep neural networks to accomplish various medical image analysis tasks using simulated data from VR-Caps and evaluate the performance of these models on real medical data. Results demonstrate the usefulness and effectiveness of the proposed virtual platform in developing algorithms that quantify fractional coverage, camera trajectory, 3D map reconstruction, and disease classification.
Magnetic-Visual Sensor Fusion based Medical SLAM for Endoscopic Capsule Robot
Nov 06, 2017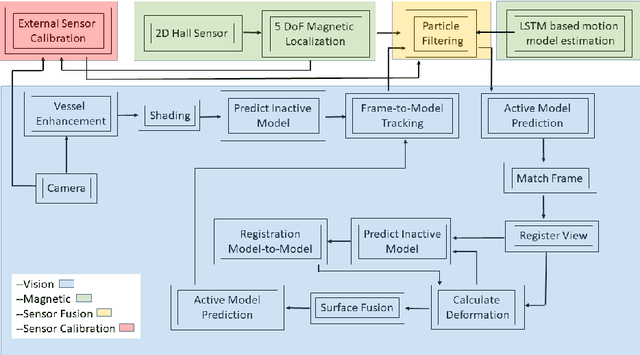
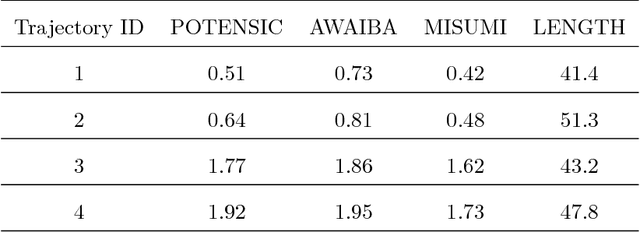
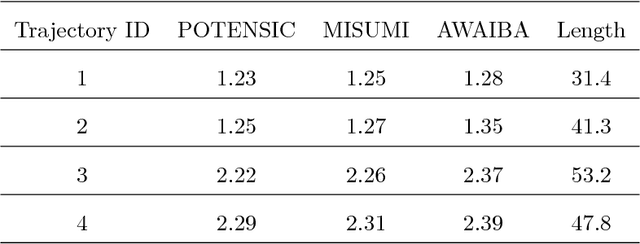
A reliable, real-time simultaneous localization and mapping (SLAM) method is crucial for the navigation of actively controlled capsule endoscopy robots. These robots are an emerging, minimally invasive diagnostic and therapeutic technology for use in the gastrointestinal (GI) tract. In this study, we propose a dense, non-rigidly deformable, and real-time map fusion approach for actively controlled endoscopic capsule robot applications. The method combines magnetic and vision based localization, and makes use of frame-to-model fusion and model-to-model loop closure. The performance of the method is demonstrated using an ex-vivo porcine stomach model. Across four trajectories of varying speed and complexity, and across three cameras, the root mean square localization errors range from 0.42 to 1.92 cm, and the root mean square surface reconstruction errors range from 1.23 to 2.39 cm.
EndoSensorFusion: Particle Filtering-Based Multi-sensory Data Fusion with Switching State-Space Model for Endoscopic Capsule Robots
Sep 25, 2017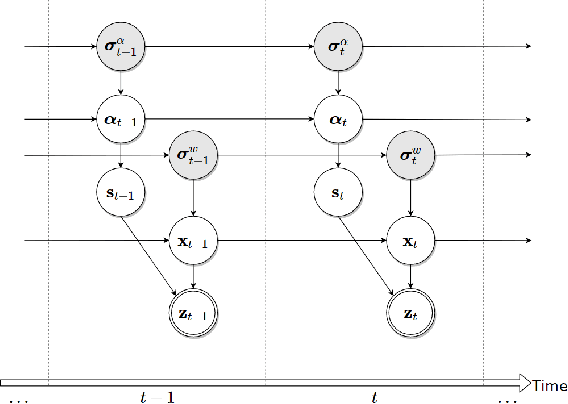
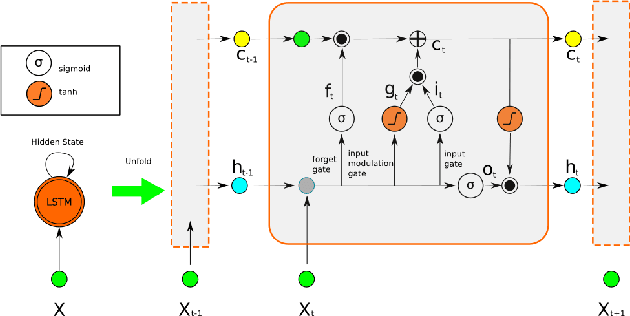
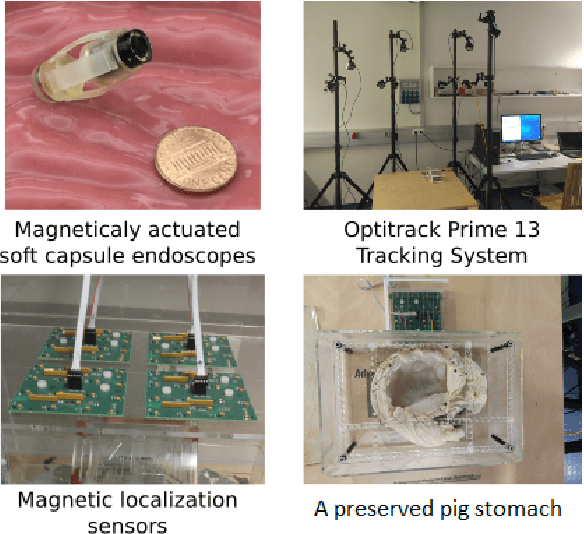
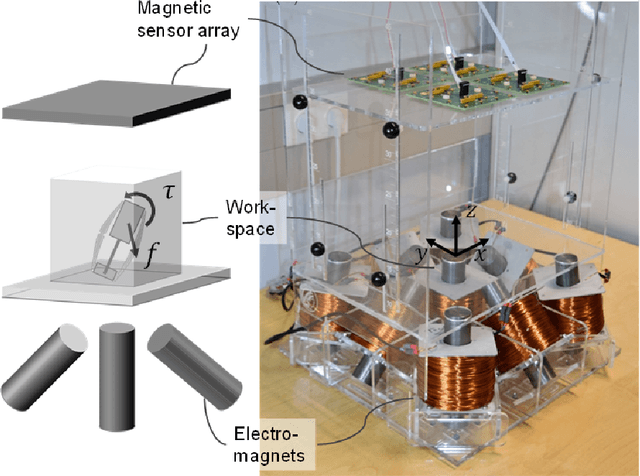
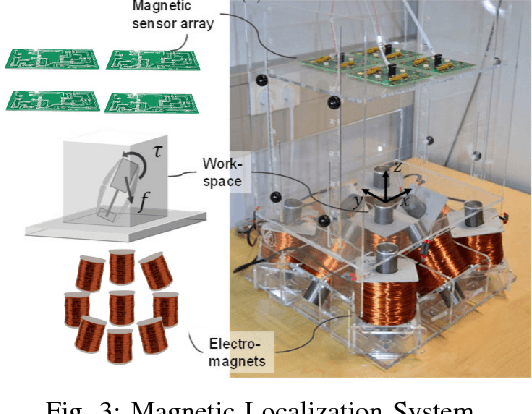
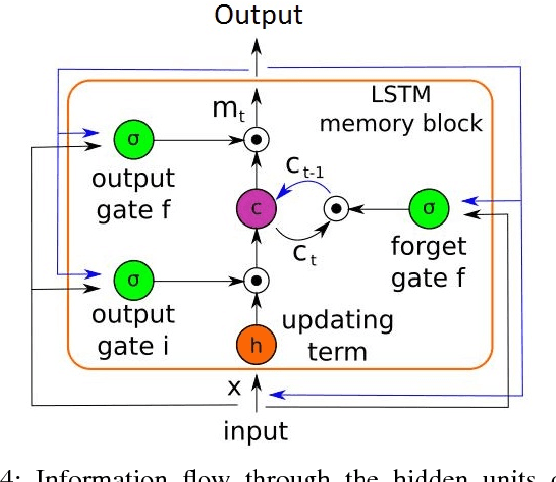
A reliable, real time multi-sensor fusion functionality is crucial for localization of actively controlled capsule endoscopy robots, which are an emerging, minimally invasive diagnostic and therapeutic technology for the gastrointestinal (GI) tract. In this study, we propose a novel multi-sensor fusion approach based on a particle filter that incorporates an online estimation of sensor reliability and a non-linear kinematic model learned by a recurrent neural network. Our method sequentially estimates the true robot pose from noisy pose observations delivered by multiple sensors. We experimentally test the method using 5 degree-of-freedom (5-DoF) absolute pose measurement by a magnetic localization system and a 6-DoF relative pose measurement by visual odometry. In addition, the proposed method is capable of detecting and handling sensor failures by ignoring corrupted data, providing the robustness expected of a medical device. Detailed analyses and evaluations are presented using ex-vivo experiments on a porcine stomach model prove that our system achieves high translational and rotational accuracies for different types of endoscopic capsule robot trajectories.
Endo-VMFuseNet: Deep Visual-Magnetic Sensor Fusion Approach for Uncalibrated, Unsynchronized and Asymmetric Endoscopic Capsule Robot Localization Data
Sep 22, 2017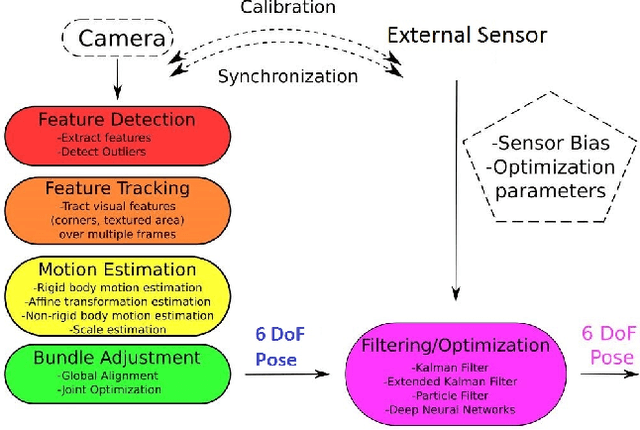
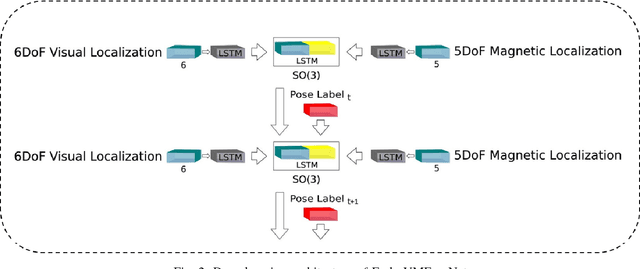
In the last decade, researchers and medical device companies have made major advances towards transforming passive capsule endoscopes into active medical robots. One of the major challenges is to endow capsule robots with accurate perception of the environment inside the human body, which will provide necessary information and enable improved medical procedures. We extend the success of deep learning approaches from various research fields to the problem of uncalibrated, asynchronous, and asymmetric sensor fusion for endoscopic capsule robots. The results performed on real pig stomach datasets show that our method achieves sub-millimeter precision for both translational and rotational movements and contains various advantages over traditional sensor fusion techniques.