 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEndo-VMFuseNet: Deep Visual-Magnetic Sensor Fusion Approach for Uncalibrated, Unsynchronized and Asymmetric Endoscopic Capsule Robot Localization Data
Paper and Code
Sep 22, 2017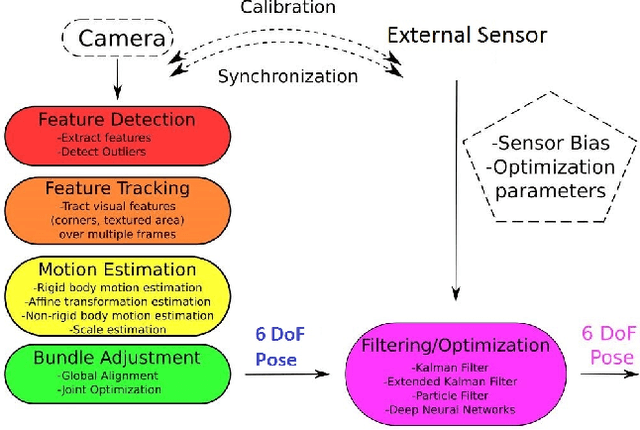
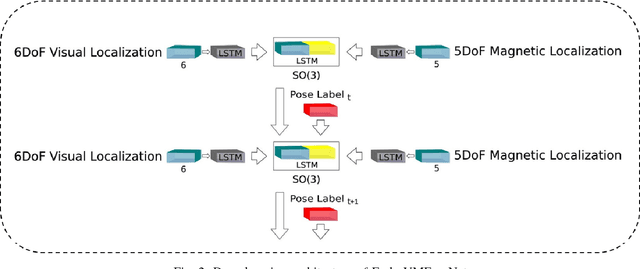
In the last decade, researchers and medical device companies have made major advances towards transforming passive capsule endoscopes into active medical robots. One of the major challenges is to endow capsule robots with accurate perception of the environment inside the human body, which will provide necessary information and enable improved medical procedures. We extend the success of deep learning approaches from various research fields to the problem of uncalibrated, asynchronous, and asymmetric sensor fusion for endoscopic capsule robots. The results performed on real pig stomach datasets show that our method achieves sub-millimeter precision for both translational and rotational movements and contains various advantages over traditional sensor fusion techniques.