 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagen 3
Aug 13, 2024We introduce Imagen 3, a latent diffusion model that generates high quality images from text prompts. We describe our quality and responsibility evaluations. Imagen 3 is preferred over other state-of-the-art (SOTA) models at the time of evaluation. In addition, we discuss issues around safety and representation, as well as methods we used to minimize the potential harm of our models.
Verified Neural Compressed Sensing
May 08, 2024



We develop the first (to the best of our knowledge) provably correct neural networks for a precise computational task, with the proof of correctness generated by an automated verification algorithm without any human input. Prior work on neural network verification has focused on partial specifications that, even when satisfied, are not sufficient to ensure that a neural network never makes errors. We focus on applying neural network verification to computational tasks with a precise notion of correctness, where a verifiably correct neural network provably solves the task at hand with no caveats. In particular, we develop an approach to train and verify the first provably correct neural networks for compressed sensing, i.e., recovering sparse vectors from a number of measurements smaller than the dimension of the vector. We show that for modest problem dimensions (up to 50), we can train neural networks that provably recover a sparse vector from linear and binarized linear measurements. Furthermore, we show that the complexity of the network (number of neurons/layers) can be adapted to the problem difficulty and solve problems where traditional compressed sensing methods are not known to provably work.
Expressive Losses for Verified Robustness via Convex Combinations
May 23, 2023



In order to train networks for verified adversarial robustness, previous work typically over-approximates the worst-case loss over (subsets of) perturbation regions or induces verifiability on top of adversarial training. The key to state-of-the-art performance lies in the expressivity of the employed loss function, which should be able to match the tightness of the verifiers to be employed post-training. We formalize a definition of expressivity, and show that it can be satisfied via simple convex combinations between adversarial attacks and IBP bounds. We then show that the resulting algorithms, named CC-IBP and MTL-IBP, yield state-of-the-art results across a variety of settings in spite of their conceptual simplicity. In particular, for $\ell_\infty$ perturbations of radius $\frac{1}{255}$ on TinyImageNet and downscaled ImageNet, MTL-IBP improves on the best standard and verified accuracies from the literature by from $1.98\%$ to $3.92\%$ points while only relying on single-step adversarial attacks.
Provably Correct Physics-Informed Neural Networks
May 17, 2023Recent work provides promising evidence that Physics-informed neural networks (PINN) can efficiently solve partial differential equations (PDE). However, previous works have failed to provide guarantees on the worst-case residual error of a PINN across the spatio-temporal domain - a measure akin to the tolerance of numerical solvers - focusing instead on point-wise comparisons between their solution and the ones obtained by a solver on a set of inputs. In real-world applications, one cannot consider tests on a finite set of points to be sufficient grounds for deployment, as the performance could be substantially worse on a different set. To alleviate this issue, we establish tolerance-based correctness conditions for PINNs over the entire input domain. To verify the extent to which they hold, we introduce $\partial$-CROWN: a general, efficient and scalable post-training framework to bound PINN residual errors. We demonstrate its effectiveness in obtaining tight certificates by applying it to two classically studied PDEs - Burgers' and Schr\"odinger's equations -, and two more challenging ones with real-world applications - the Allan-Cahn and Diffusion-Sorption equations.
DRIP: Domain Refinement Iteration with Polytopes for Backward Reachability Analysis of Neural Feedback Loops
Dec 09, 2022



Safety certification of data-driven control techniques remains a major open problem. This work investigates backward reachability as a framework for providing collision avoidance guarantees for systems controlled by neural network (NN) policies. Because NNs are typically not invertible, existing methods conservatively assume a domain over which to relax the NN, which causes loose over-approximations of the set of states that could lead the system into the obstacle (i.e., backprojection (BP) sets). To address this issue, we introduce DRIP, an algorithm with a refinement loop on the relaxation domain, which substantially tightens the BP set bounds. Furthermore, we introduce a formulation that enables directly obtaining closed-form representations of polytopes to bound the BP sets tighter than prior work, which required solving linear programs and using hyper-rectangles. Furthermore, this work extends the NN relaxation algorithm to handle polytope domains, which further tightens the bounds on BP sets. DRIP is demonstrated in numerical experiments on control systems, including a ground robot controlled by a learned NN obstacle avoidance policy.
IBP Regularization for Verified Adversarial Robustness via Branch-and-Bound
Jun 29, 2022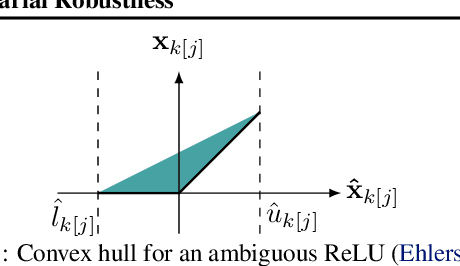
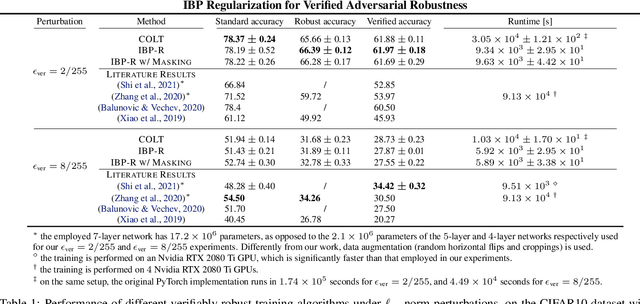
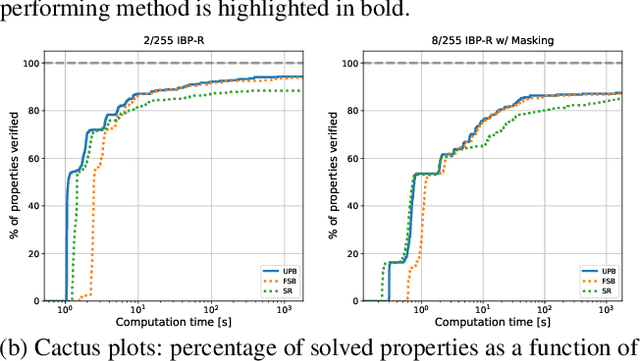
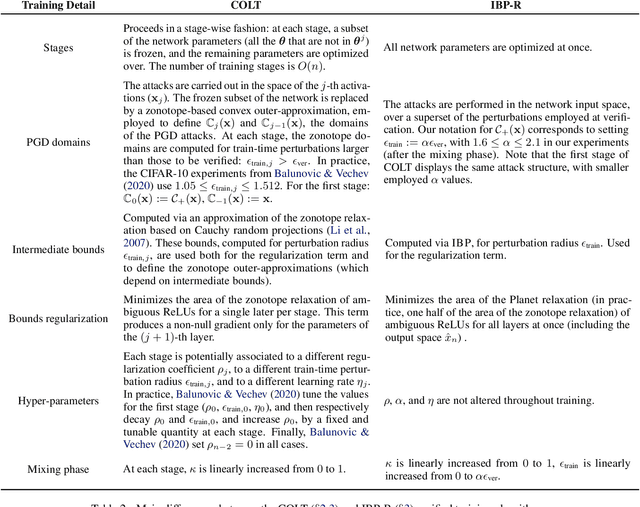
Recent works have tried to increase the verifiability of adversarially trained networks by running the attacks over domains larger than the original perturbations and adding various regularization terms to the objective. However, these algorithms either underperform or require complex and expensive stage-wise training procedures, hindering their practical applicability. We present IBP-R, a novel verified training algorithm that is both simple and effective. IBP-R induces network verifiability by coupling adversarial attacks on enlarged domains with a regularization term, based on inexpensive interval bound propagation, that minimizes the gap between the non-convex verification problem and its approximations. By leveraging recent branch-and-bound frameworks, we show that IBP-R obtains state-of-the-art verified robustness-accuracy trade-offs for small perturbations on CIFAR-10 while training significantly faster than relevant previous work. Additionally, we present UPB, a novel branching strategy that, relying on a simple heuristic based on $\beta$-CROWN, reduces the cost of state-of-the-art branching algorithms while yielding splits of comparable quality.
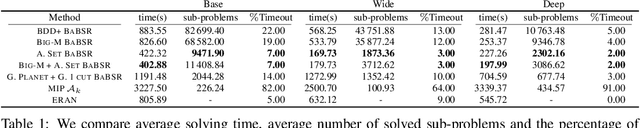
Improved Branch and Bound for Neural Network Verification via Lagrangian Decomposition
Apr 14, 2021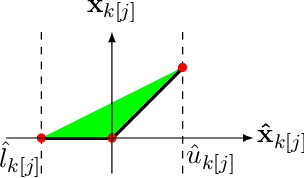
We improve the scalability of Branch and Bound (BaB) algorithms for formally proving input-output properties of neural networks. First, we propose novel bounding algorithms based on Lagrangian Decomposition. Previous works have used off-the-shelf solvers to solve relaxations at each node of the BaB tree, or constructed weaker relaxations that can be solved efficiently, but lead to unnecessarily weak bounds. Our formulation restricts the optimization to a subspace of the dual domain that is guaranteed to contain the optimum, resulting in accelerated convergence. Furthermore, it allows for a massively parallel implementation, which is amenable to GPU acceleration via modern deep learning frameworks. Second, we present a novel activation-based branching strategy. By coupling an inexpensive heuristic with fast dual bounding, our branching scheme greatly reduces the size of the BaB tree compared to previous heuristic methods. Moreover, it performs competitively with a recent strategy based on learning algorithms, without its large offline training cost. Finally, we design a BaB framework, named Branch and Dual Network Bound (BaDNB), based on our novel bounding and branching algorithms. We show that BaDNB outperforms previous complete verification systems by a large margin, cutting average verification times by factors up to 50 on adversarial robustness properties.
Verifying Probabilistic Specifications with Functional Lagrangians
Feb 18, 2021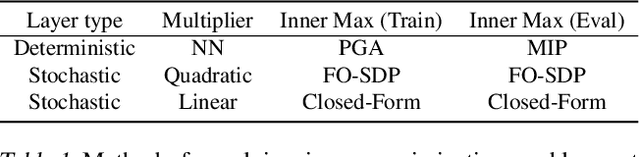
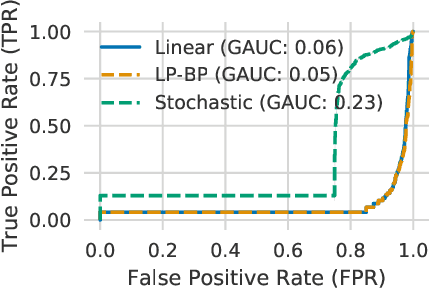
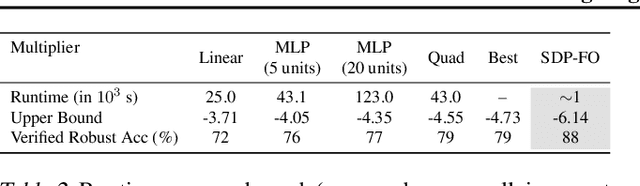
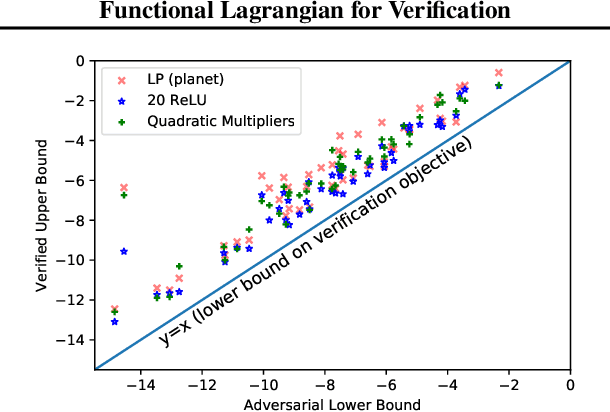
We propose a general framework for verifying input-output specifications of neural networks using functional Lagrange multipliers that generalizes standard Lagrangian duality. We derive theoretical properties of the framework, which can handle arbitrary probabilistic specifications, showing that it provably leads to tight verification when a sufficiently flexible class of functional multipliers is chosen. With a judicious choice of the class of functional multipliers, the framework can accommodate desired trade-offs between tightness and complexity. We demonstrate empirically that the framework can handle a diverse set of networks, including Bayesian neural networks with Gaussian posterior approximations, MC-dropout networks, and verify specifications on adversarial robustness and out-of-distribution(OOD) detection. Our framework improves upon prior work in some settings and also generalizes to new stochastic networks and probabilistic specifications, like distributionally robust OOD detection.
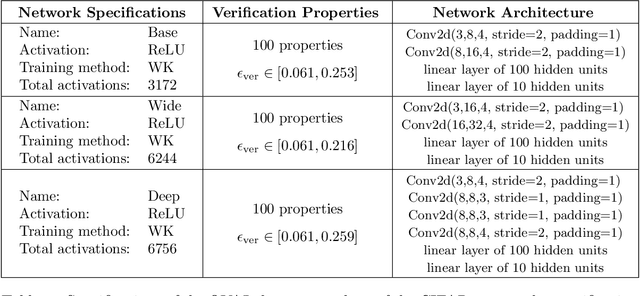
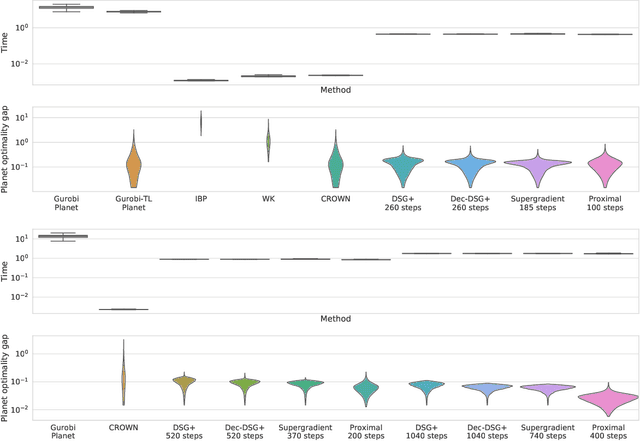
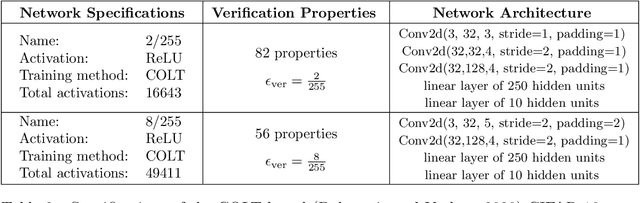
Scaling the Convex Barrier with Sparse Dual Algorithms
Jan 26, 2021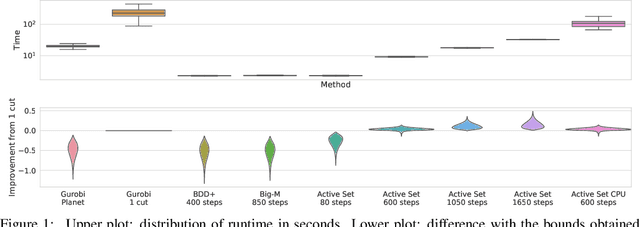
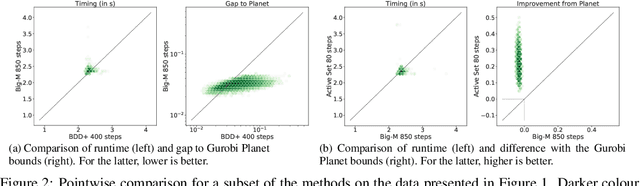
Tight and efficient neural network bounding is crucial to the scaling of neural network verification systems. Many efficient bounding algorithms have been presented recently, but they are often too loose to verify more challenging properties. This is due to the weakness of the employed relaxation, which is usually a linear program of size linear in the number of neurons. While a tighter linear relaxation for piecewise-linear activations exists, it comes at the cost of exponentially many constraints and currently lacks an efficient customized solver. We alleviate this deficiency by presenting two novel dual algorithms: one operates a subgradient method on a small active set of dual variables, the other exploits the sparsity of Frank-Wolfe type optimizers to incur only a linear memory cost. Both methods recover the strengths of the new relaxation: tightness and a linear separation oracle. At the same time, they share the benefits of previous dual approaches for weaker relaxations: massive parallelism, GPU implementation, low cost per iteration and valid bounds at any time. As a consequence, we can obtain better bounds than off-the-shelf solvers in only a fraction of their running time, attaining significant formal verification speed-ups.
Enabling certification of verification-agnostic networks via memory-efficient semidefinite programming
Nov 03, 2020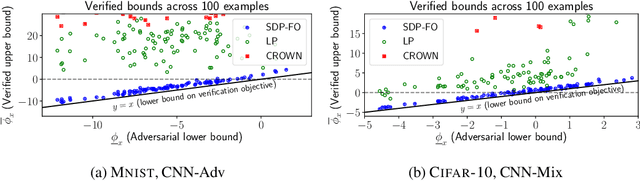
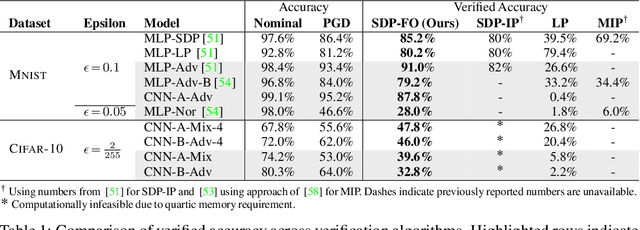
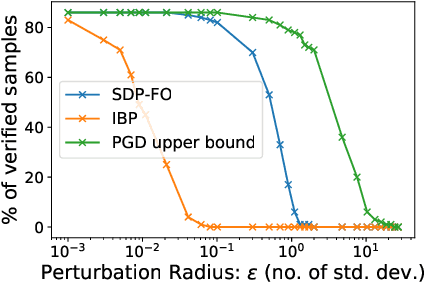
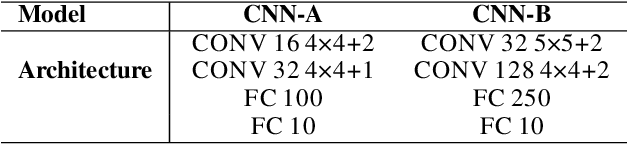
Convex relaxations have emerged as a promising approach for verifying desirable properties of neural networks like robustness to adversarial perturbations. Widely used Linear Programming (LP) relaxations only work well when networks are trained to facilitate verification. This precludes applications that involve verification-agnostic networks, i.e., networks not specially trained for verification. On the other hand, semidefinite programming (SDP) relaxations have successfully be applied to verification-agnostic networks, but do not currently scale beyond small networks due to poor time and space asymptotics. In this work, we propose a first-order dual SDP algorithm that (1) requires memory only linear in the total number of network activations, (2) only requires a fixed number of forward/backward passes through the network per iteration. By exploiting iterative eigenvector methods, we express all solver operations in terms of forward and backward passes through the network, enabling efficient use of hardware like GPUs/TPUs. For two verification-agnostic networks on MNIST and CIFAR-10, we significantly improve L-inf verified robust accuracy from 1% to 88% and 6% to 40% respectively. We also demonstrate tight verification of a quadratic stability specification for the decoder of a variational autoencoder.