 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning with Plasticity Injection
May 24, 2023A growing body of evidence suggests that neural networks employed in deep reinforcement learning (RL) gradually lose their plasticity, the ability to learn from new data; however, the analysis and mitigation of this phenomenon is hampered by the complex relationship between plasticity, exploration, and performance in RL. This paper introduces plasticity injection, a minimalistic intervention that increases the network plasticity without changing the number of trainable parameters or biasing the predictions. The applications of this intervention are two-fold: first, as a diagnostic tool $\unicode{x2014}$ if injection increases the performance, we may conclude that an agent's network was losing its plasticity. This tool allows us to identify a subset of Atari environments where the lack of plasticity causes performance plateaus, motivating future studies on understanding and combating plasticity loss. Second, plasticity injection can be used to improve the computational efficiency of RL training if the agent has to re-learn from scratch due to exhausted plasticity or by growing the agent's network dynamically without compromising performance. The results on Atari show that plasticity injection attains stronger performance compared to alternative methods while being computationally efficient.
An Analysis of Quantile Temporal-Difference Learning
Jan 11, 2023



We analyse quantile temporal-difference learning (QTD), a distributional reinforcement learning algorithm that has proven to be a key component in several successful large-scale applications of reinforcement learning. Despite these empirical successes, a theoretical understanding of QTD has proven elusive until now. Unlike classical TD learning, which can be analysed with standard stochastic approximation tools, QTD updates do not approximate contraction mappings, are highly non-linear, and may have multiple fixed points. The core result of this paper is a proof of convergence to the fixed points of a related family of dynamic programming procedures with probability 1, putting QTD on firm theoretical footing. The proof establishes connections between QTD and non-linear differential inclusions through stochastic approximation theory and non-smooth analysis.
An Empirical Study of Implicit Regularization in Deep Offline RL
Jul 07, 2022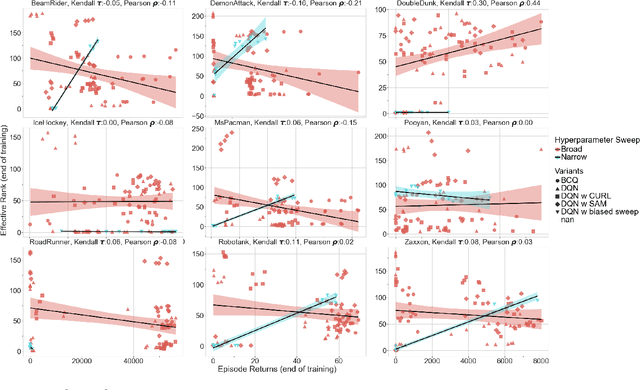

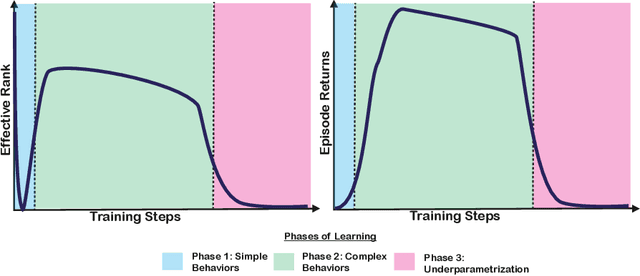
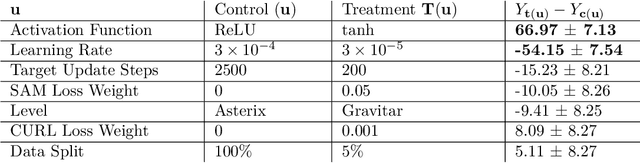
Deep neural networks are the most commonly used function approximators in offline reinforcement learning. Prior works have shown that neural nets trained with TD-learning and gradient descent can exhibit implicit regularization that can be characterized by under-parameterization of these networks. Specifically, the rank of the penultimate feature layer, also called \textit{effective rank}, has been observed to drastically collapse during the training. In turn, this collapse has been argued to reduce the model's ability to further adapt in later stages of learning, leading to the diminished final performance. Such an association between the effective rank and performance makes effective rank compelling for offline RL, primarily for offline policy evaluation. In this work, we conduct a careful empirical study on the relation between effective rank and performance on three offline RL datasets : bsuite, Atari, and DeepMind lab. We observe that a direct association exists only in restricted settings and disappears in the more extensive hyperparameter sweeps. Also, we empirically identify three phases of learning that explain the impact of implicit regularization on the learning dynamics and found that bootstrapping alone is insufficient to explain the collapse of the effective rank. Further, we show that several other factors could confound the relationship between effective rank and performance and conclude that studying this association under simplistic assumptions could be highly misleading.
The Phenomenon of Policy Churn
Jun 09, 2022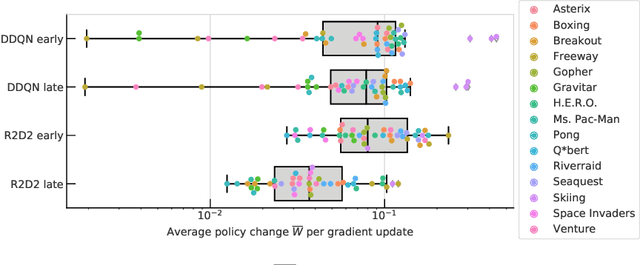
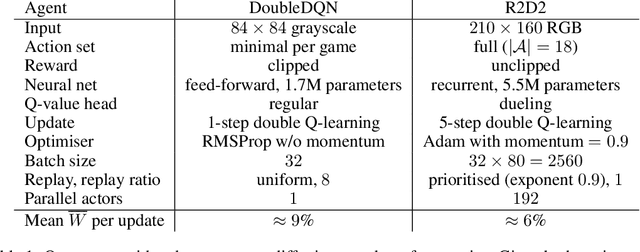
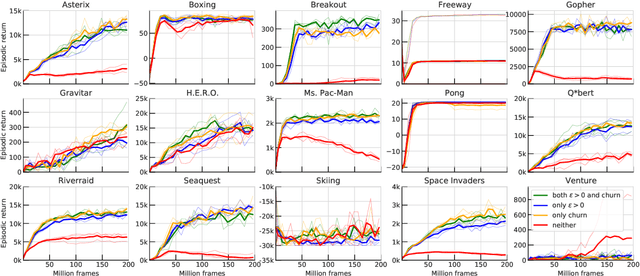
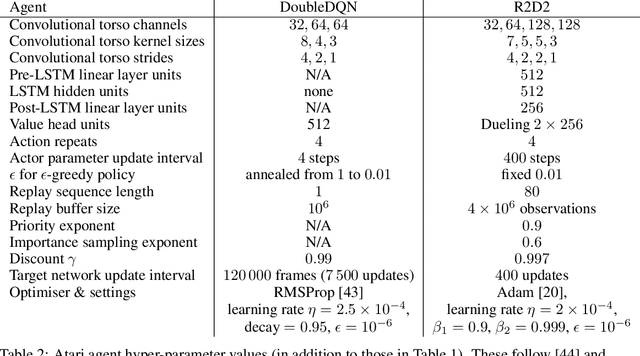
We identify and study the phenomenon of policy churn, that is, the rapid change of the greedy policy in value-based reinforcement learning. Policy churn operates at a surprisingly rapid pace, changing the greedy action in a large fraction of states within a handful of learning updates (in a typical deep RL set-up such as DQN on Atari). We characterise the phenomenon empirically, verifying that it is not limited to specific algorithm or environment properties. A number of ablations help whittle down the plausible explanations on why churn occurs to just a handful, all related to deep learning. Finally, we hypothesise that policy churn is a beneficial but overlooked form of implicit exploration that casts $\epsilon$-greedy exploration in a fresh light, namely that $\epsilon$-noise plays a much smaller role than expected.
The Difficulty of Passive Learning in Deep Reinforcement Learning
Oct 26, 2021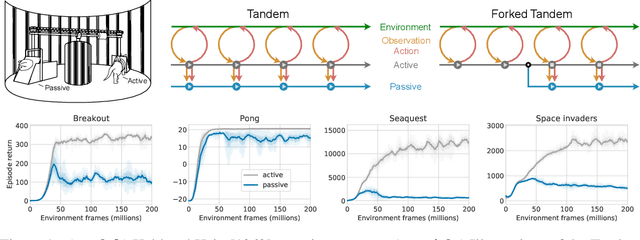


Learning to act from observational data without active environmental interaction is a well-known challenge in Reinforcement Learning (RL). Recent approaches involve constraints on the learned policy or conservative updates, preventing strong deviations from the state-action distribution of the dataset. Although these methods are evaluated using non-linear function approximation, theoretical justifications are mostly limited to the tabular or linear cases. Given the impressive results of deep reinforcement learning, we argue for a need to more clearly understand the challenges in this setting. In the vein of Held & Hein's classic 1963 experiment, we propose the "tandem learning" experimental paradigm which facilitates our empirical analysis of the difficulties in offline reinforcement learning. We identify function approximation in conjunction with fixed data distributions as the strongest factors, thereby extending but also challenging hypotheses stated in past work. Our results provide relevant insights for offline deep reinforcement learning, while also shedding new light on phenomena observed in the online case of learning control.
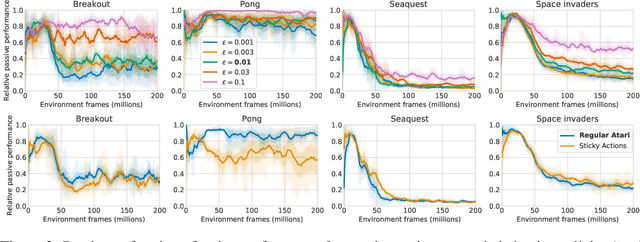
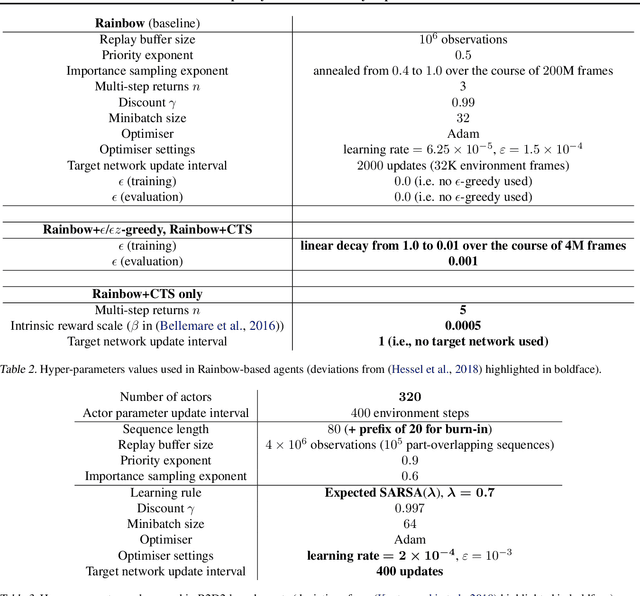
When should agents explore?
Aug 26, 2021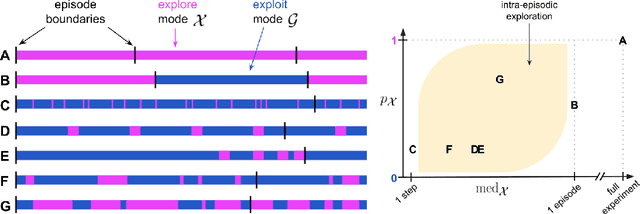
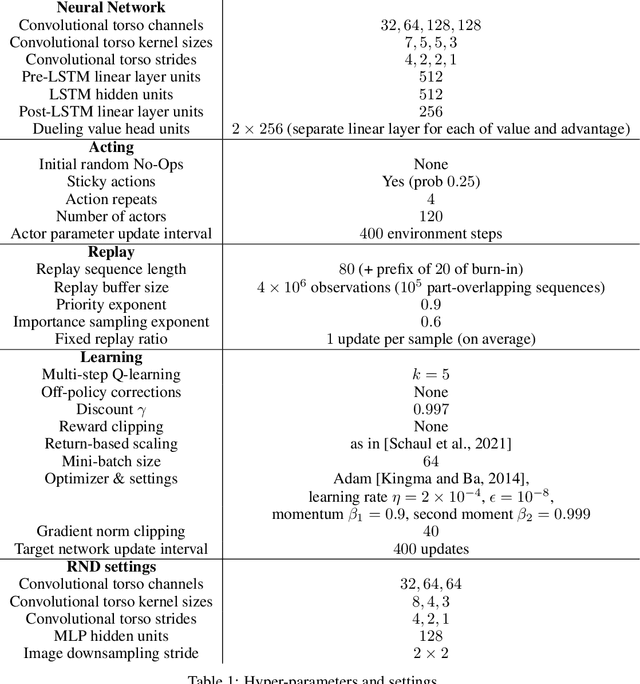
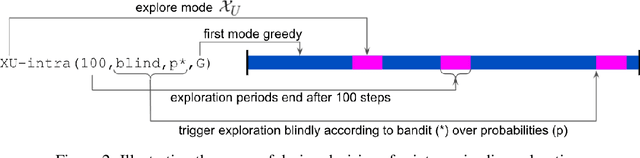
Exploration remains a central challenge for reinforcement learning (RL). Virtually all existing methods share the feature of a monolithic behaviour policy that changes only gradually (at best). In contrast, the exploratory behaviours of animals and humans exhibit a rich diversity, namely including forms of switching between modes. This paper presents an initial study of mode-switching, non-monolithic exploration for RL. We investigate different modes to switch between, at what timescales it makes sense to switch, and what signals make for good switching triggers. We also propose practical algorithmic components that make the switching mechanism adaptive and robust, which enables flexibility without an accompanying hyper-parameter-tuning burden. Finally, we report a promising and detailed analysis on Atari, using two-mode exploration and switching at sub-episodic time-scales.
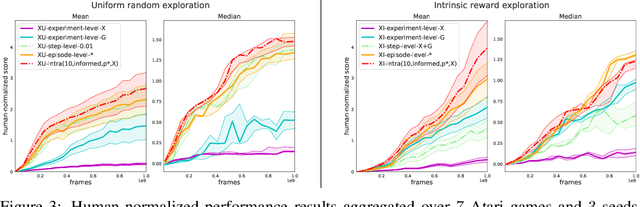
Return-based Scaling: Yet Another Normalisation Trick for Deep RL
May 11, 2021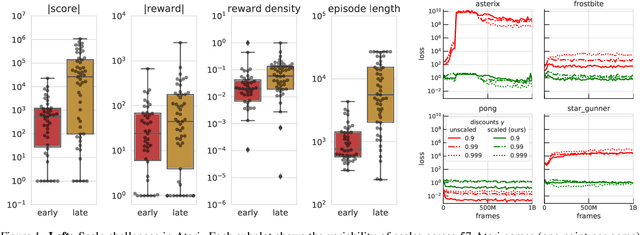
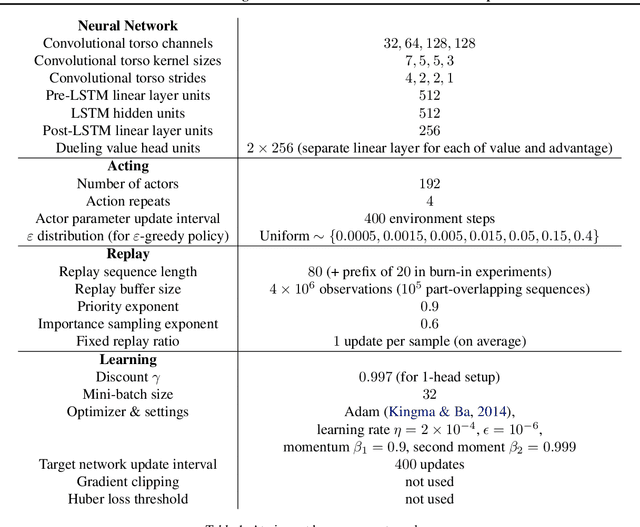
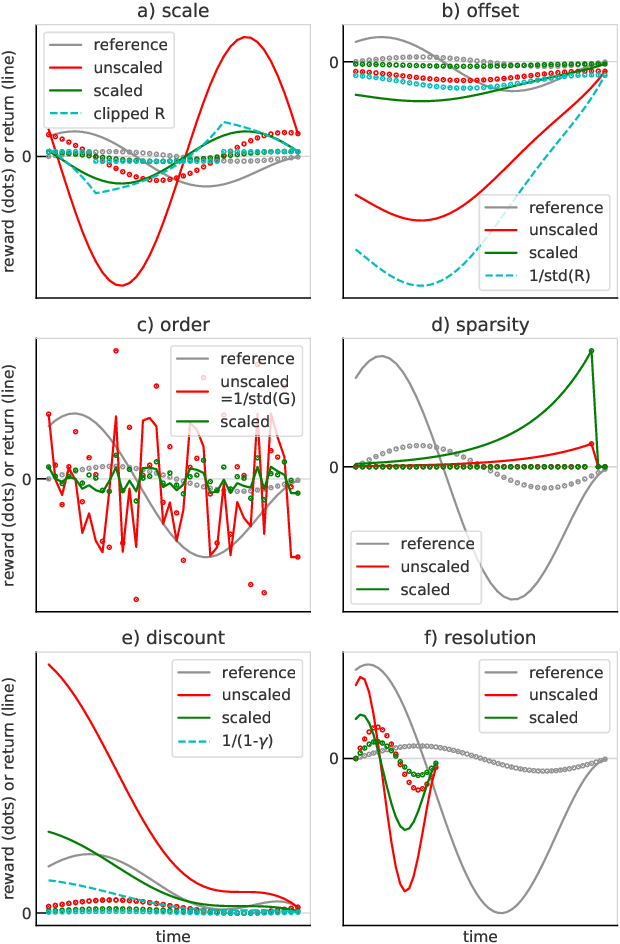
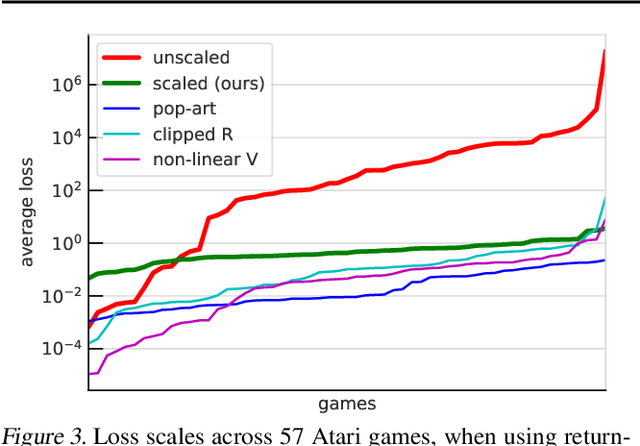
Scaling issues are mundane yet irritating for practitioners of reinforcement learning. Error scales vary across domains, tasks, and stages of learning; sometimes by many orders of magnitude. This can be detrimental to learning speed and stability, create interference between learning tasks, and necessitate substantial tuning. We revisit this topic for agents based on temporal-difference learning, sketch out some desiderata and investigate scenarios where simple fixes fall short. The mechanism we propose requires neither tuning, clipping, nor adaptation. We validate its effectiveness and robustness on the suite of Atari games. Our scaling method turns out to be particularly helpful at mitigating interference, when training a shared neural network on multiple targets that differ in reward scale or discounting.
On The Effect of Auxiliary Tasks on Representation Dynamics
Feb 25, 2021

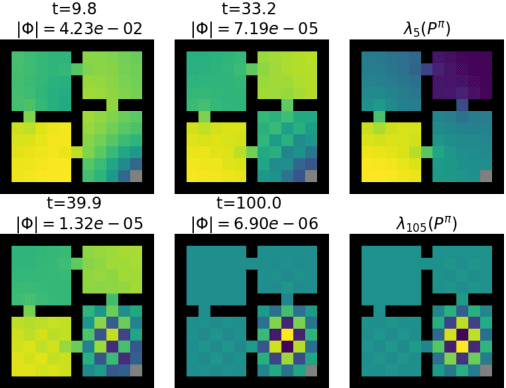

While auxiliary tasks play a key role in shaping the representations learnt by reinforcement learning agents, much is still unknown about the mechanisms through which this is achieved. This work develops our understanding of the relationship between auxiliary tasks, environment structure, and representations by analysing the dynamics of temporal difference algorithms. Through this approach, we establish a connection between the spectral decomposition of the transition operator and the representations induced by a variety of auxiliary tasks. We then leverage insights from these theoretical results to inform the selection of auxiliary tasks for deep reinforcement learning agents in sparse-reward environments.
Temporally-Extended ε-Greedy Exploration
Jun 02, 2020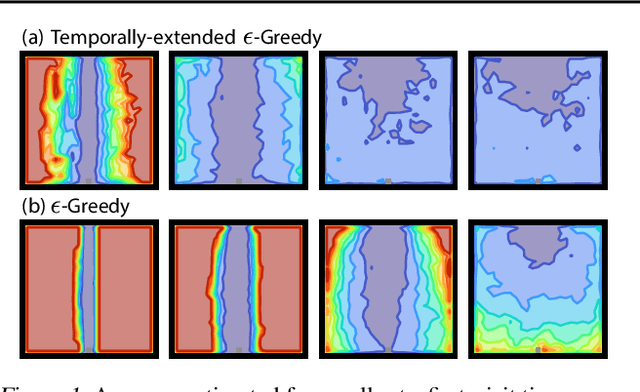

Recent work on exploration in reinforcement learning (RL) has led to a series of increasingly complex solutions to the problem. This increase in complexity often comes at the expense of generality. Recent empirical studies suggest that, when applied to a broader set of domains, some sophisticated exploration methods are outperformed by simpler counterparts, such as {\epsilon}-greedy. In this paper we propose an exploration algorithm that retains the simplicity of {\epsilon}-greedy while reducing dithering. We build on a simple hypothesis: the main limitation of {\epsilon}-greedy exploration is its lack of temporal persistence, which limits its ability to escape local optima. We propose a temporally extended form of {\epsilon}-greedy that simply repeats the sampled action for a random duration. It turns out that, for many duration distributions, this suffices to improve exploration on a large set of domains. Interestingly, a class of distributions inspired by ecological models of animal foraging behaviour yields particularly strong performance.
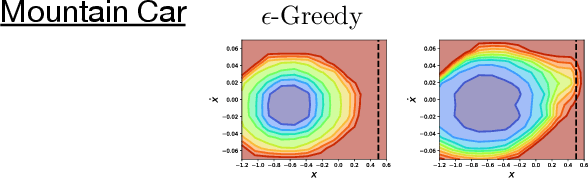
Adapting Behaviour for Learning Progress
Dec 14, 2019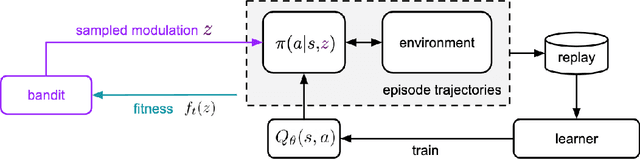
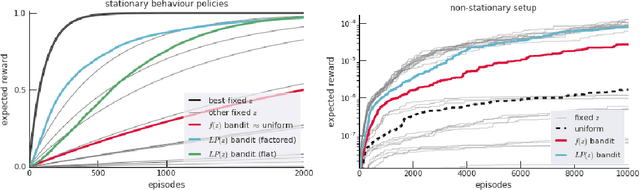
Determining what experience to generate to best facilitate learning (i.e. exploration) is one of the distinguishing features and open challenges in reinforcement learning. The advent of distributed agents that interact with parallel instances of the environment has enabled larger scales and greater flexibility, but has not removed the need to tune exploration to the task, because the ideal data for the learning algorithm necessarily depends on its process of learning. We propose to dynamically adapt the data generation by using a non-stationary multi-armed bandit to optimize a proxy of the learning progress. The data distribution is controlled by modulating multiple parameters of the policy (such as stochasticity, consistency or optimism) without significant overhead. The adaptation speed of the bandit can be increased by exploiting the factored modulation structure. We demonstrate on a suite of Atari 2600 games how this unified approach produces results comparable to per-task tuning at a fraction of the cost.