Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn The Effect of Auxiliary Tasks on Representation Dynamics
Paper and Code
Feb 25, 2021

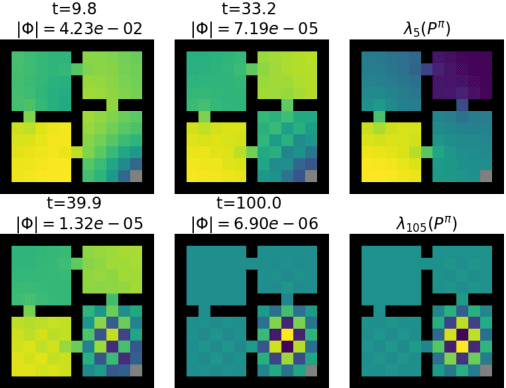

While auxiliary tasks play a key role in shaping the representations learnt by reinforcement learning agents, much is still unknown about the mechanisms through which this is achieved. This work develops our understanding of the relationship between auxiliary tasks, environment structure, and representations by analysing the dynamics of temporal difference algorithms. Through this approach, we establish a connection between the spectral decomposition of the transition operator and the representations induced by a variety of auxiliary tasks. We then leverage insights from these theoretical results to inform the selection of auxiliary tasks for deep reinforcement learning agents in sparse-reward environments.
* AISTATS 2021
View paper on