 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Human-Timescale Adaptation in an Open-Ended Task Space
Jan 18, 2023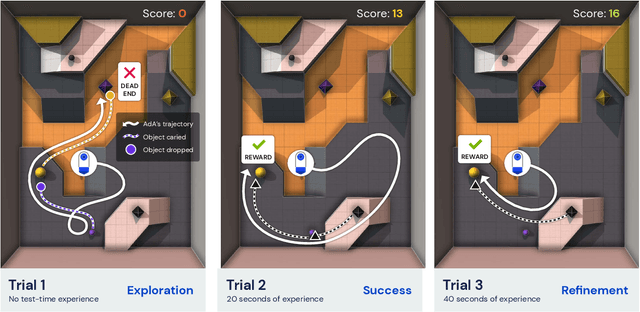
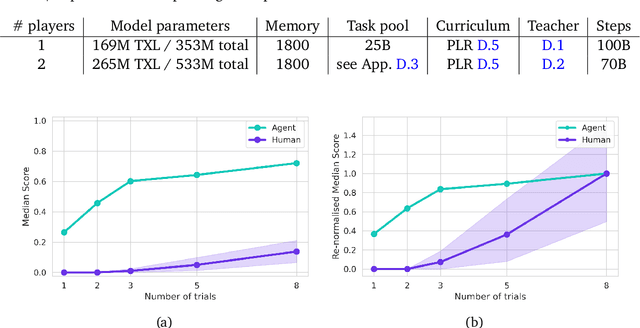
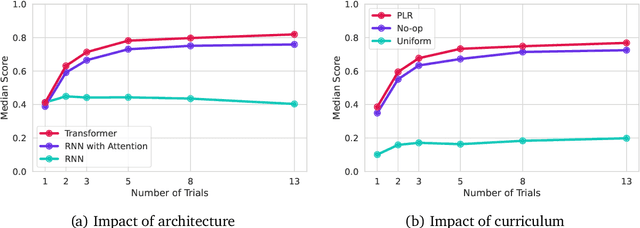
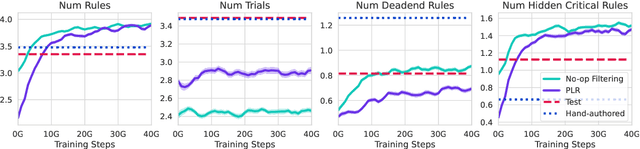
Foundation models have shown impressive adaptation and scalability in supervised and self-supervised learning problems, but so far these successes have not fully translated to reinforcement learning (RL). In this work, we demonstrate that training an RL agent at scale leads to a general in-context learning algorithm that can adapt to open-ended novel embodied 3D problems as quickly as humans. In a vast space of held-out environment dynamics, our adaptive agent (AdA) displays on-the-fly hypothesis-driven exploration, efficient exploitation of acquired knowledge, and can successfully be prompted with first-person demonstrations. Adaptation emerges from three ingredients: (1) meta-reinforcement learning across a vast, smooth and diverse task distribution, (2) a policy parameterised as a large-scale attention-based memory architecture, and (3) an effective automated curriculum that prioritises tasks at the frontier of an agent's capabilities. We demonstrate characteristic scaling laws with respect to network size, memory length, and richness of the training task distribution. We believe our results lay the foundation for increasingly general and adaptive RL agents that perform well across ever-larger open-ended domains.
An Empirical Study of Implicit Regularization in Deep Offline RL
Jul 07, 2022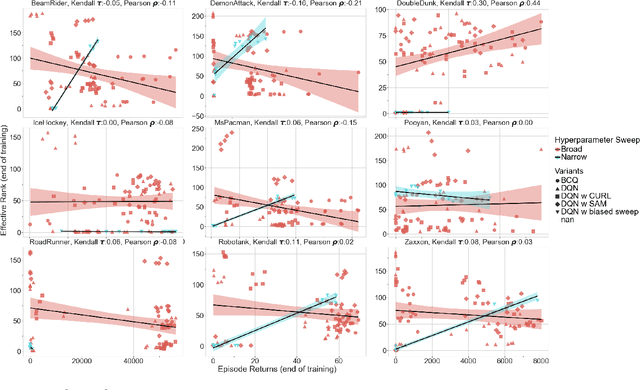

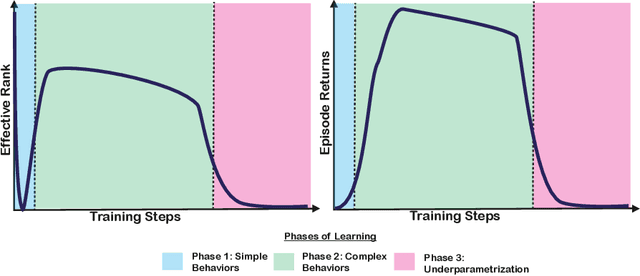
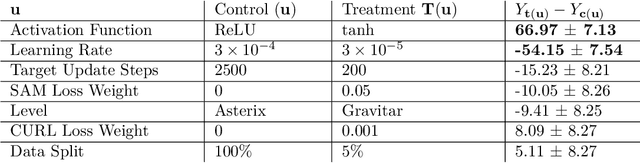
Deep neural networks are the most commonly used function approximators in offline reinforcement learning. Prior works have shown that neural nets trained with TD-learning and gradient descent can exhibit implicit regularization that can be characterized by under-parameterization of these networks. Specifically, the rank of the penultimate feature layer, also called \textit{effective rank}, has been observed to drastically collapse during the training. In turn, this collapse has been argued to reduce the model's ability to further adapt in later stages of learning, leading to the diminished final performance. Such an association between the effective rank and performance makes effective rank compelling for offline RL, primarily for offline policy evaluation. In this work, we conduct a careful empirical study on the relation between effective rank and performance on three offline RL datasets : bsuite, Atari, and DeepMind lab. We observe that a direct association exists only in restricted settings and disappears in the more extensive hyperparameter sweeps. Also, we empirically identify three phases of learning that explain the impact of implicit regularization on the learning dynamics and found that bootstrapping alone is insufficient to explain the collapse of the effective rank. Further, we show that several other factors could confound the relationship between effective rank and performance and conclude that studying this association under simplistic assumptions could be highly misleading.
Open-Ended Learning Leads to Generally Capable Agents
Jul 31, 2021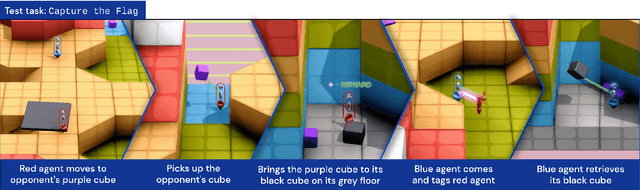
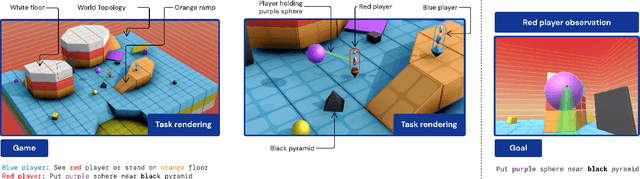
In this work we create agents that can perform well beyond a single, individual task, that exhibit much wider generalisation of behaviour to a massive, rich space of challenges. We define a universe of tasks within an environment domain and demonstrate the ability to train agents that are generally capable across this vast space and beyond. The environment is natively multi-agent, spanning the continuum of competitive, cooperative, and independent games, which are situated within procedurally generated physical 3D worlds. The resulting space is exceptionally diverse in terms of the challenges posed to agents, and as such, even measuring the learning progress of an agent is an open research problem. We propose an iterative notion of improvement between successive generations of agents, rather than seeking to maximise a singular objective, allowing us to quantify progress despite tasks being incomparable in terms of achievable rewards. We show that through constructing an open-ended learning process, which dynamically changes the training task distributions and training objectives such that the agent never stops learning, we achieve consistent learning of new behaviours. The resulting agent is able to score reward in every one of our humanly solvable evaluation levels, with behaviour generalising to many held-out points in the universe of tasks. Examples of this zero-shot generalisation include good performance on Hide and Seek, Capture the Flag, and Tag. Through analysis and hand-authored probe tasks we characterise the behaviour of our agent, and find interesting emergent heuristic behaviours such as trial-and-error experimentation, simple tool use, option switching, and cooperation. Finally, we demonstrate that the general capabilities of this agent could unlock larger scale transfer of behaviour through cheap finetuning.
Regularized Behavior Value Estimation
Mar 17, 2021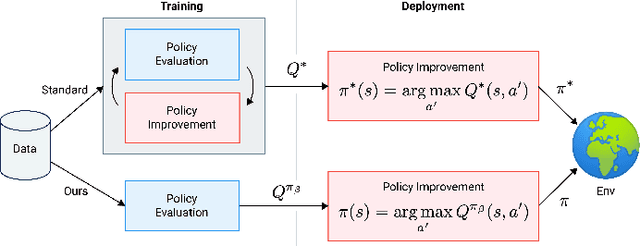
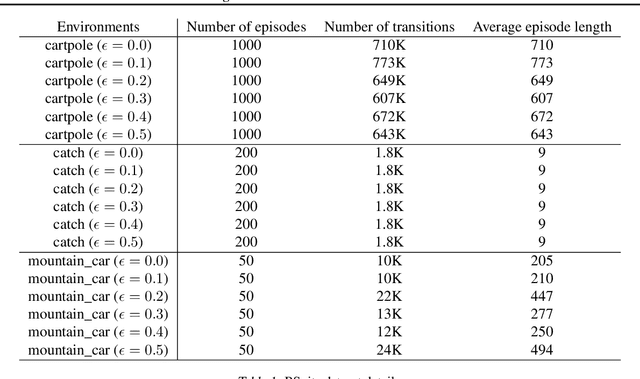
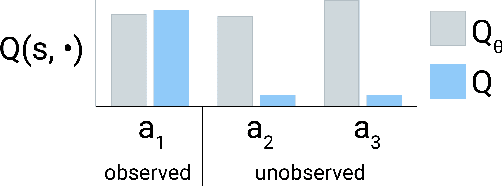
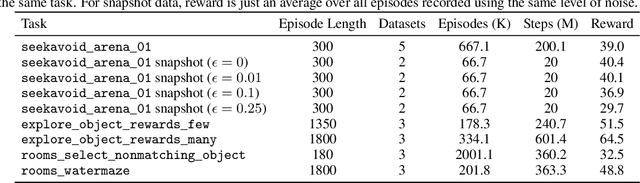
Offline reinforcement learning restricts the learning process to rely only on logged-data without access to an environment. While this enables real-world applications, it also poses unique challenges. One important challenge is dealing with errors caused by the overestimation of values for state-action pairs not well-covered by the training data. Due to bootstrapping, these errors get amplified during training and can lead to divergence, thereby crippling learning. To overcome this challenge, we introduce Regularized Behavior Value Estimation (R-BVE). Unlike most approaches, which use policy improvement during training, R-BVE estimates the value of the behavior policy during training and only performs policy improvement at deployment time. Further, R-BVE uses a ranking regularisation term that favours actions in the dataset that lead to successful outcomes. We provide ample empirical evidence of R-BVE's effectiveness, including state-of-the-art performance on the RL Unplugged ATARI dataset. We also test R-BVE on new datasets, from bsuite and a challenging DeepMind Lab task, and show that R-BVE outperforms other state-of-the-art discrete control offline RL methods.
Sequential Changepoint Detection in Neural Networks with Checkpoints
Oct 06, 2020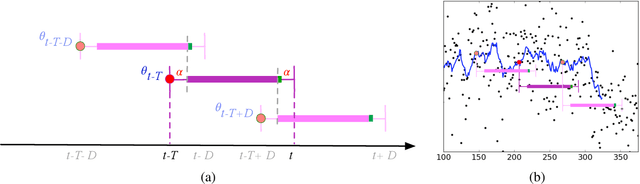
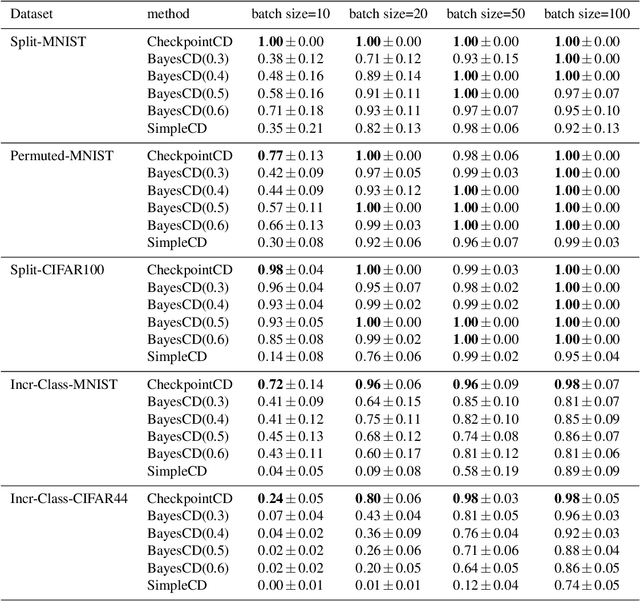


We introduce a framework for online changepoint detection and simultaneous model learning which is applicable to highly parametrized models, such as deep neural networks. It is based on detecting changepoints across time by sequentially performing generalized likelihood ratio tests that require only evaluations of simple prediction score functions. This procedure makes use of checkpoints, consisting of early versions of the actual model parameters, that allow to detect distributional changes by performing predictions on future data. We define an algorithm that bounds the Type I error in the sequential testing procedure. We demonstrate the efficiency of our method in challenging continual learning applications with unknown task changepoints, and show improved performance compared to online Bayesian changepoint detection.
Importance Weighted Policy Learning and Adaption
Sep 10, 2020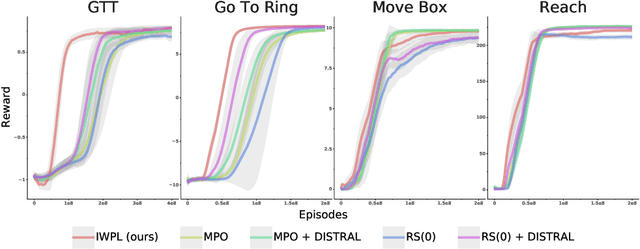
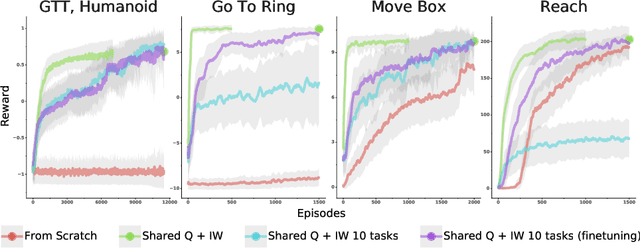
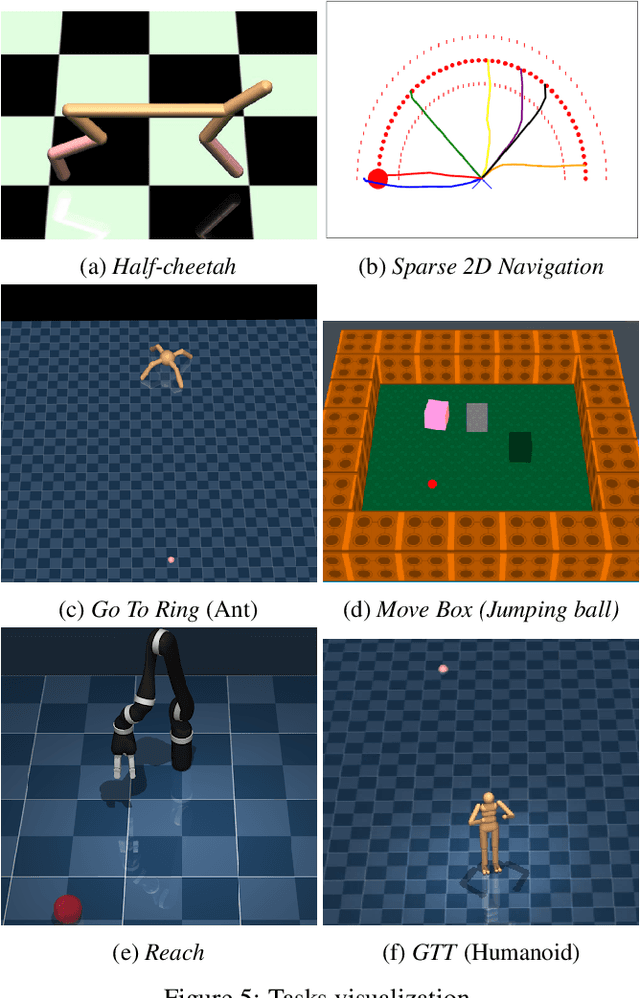
The ability to exploit prior experience to solve novel problems rapidly is a hallmark of biological learning systems and of great practical importance for artificial ones. In the meta reinforcement learning literature much recent work has focused on the problem of optimizing the learning process itself. In this paper we study a complementary approach which is conceptually simple, general, modular and built on top of recent improvements in off-policy learning. The framework is inspired by ideas from the probabilistic inference literature and combines robust off-policy learning with a behavior prior, or default behavior that constrains the space of solutions and serves as a bias for exploration; as well as a representation for the value function, both of which are easily learned from a number of training tasks in a multi-task scenario. Our approach achieves competitive adaptation performance on hold-out tasks compared to meta reinforcement learning baselines and can scale to complex sparse-reward scenarios.
Task Agnostic Continual Learning via Meta Learning
Jun 12, 2019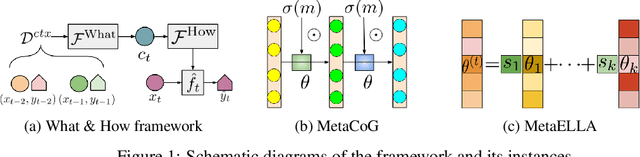
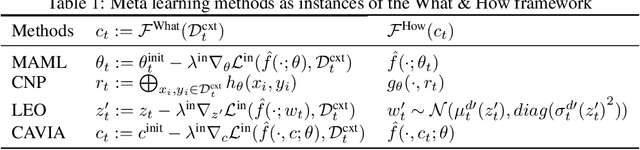
While neural networks are powerful function approximators, they suffer from catastrophic forgetting when the data distribution is not stationary. One particular formalism that studies learning under non-stationary distribution is provided by continual learning, where the non-stationarity is imposed by a sequence of distinct tasks. Most methods in this space assume, however, the knowledge of task boundaries, and focus on alleviating catastrophic forgetting. In this work, we depart from this view and move the focus towards faster remembering -- i.e measuring how quickly the network recovers performance rather than measuring the network's performance without any adaptation. We argue that in many settings this can be more effective and that it opens the door to combining meta-learning and continual learning techniques, leveraging their complementary advantages. We propose a framework specific for the scenario where no information about task boundaries or task identity is given. It relies on a separation of concerns into what task is being solved and how the task should be solved. This framework is implemented by differentiating task specific parameters from task agnostic parameters, where the latter are optimized in a continual meta learning fashion, without access to multiple tasks at the same time. We showcase this framework in a supervised learning scenario and discuss the implication of the proposed formalism.
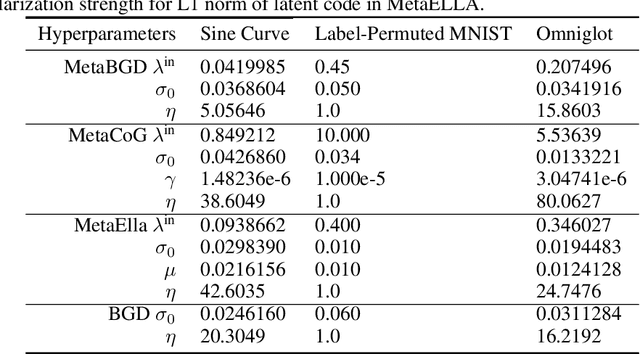
Meta-Learning with Latent Embedding Optimization
Sep 28, 2018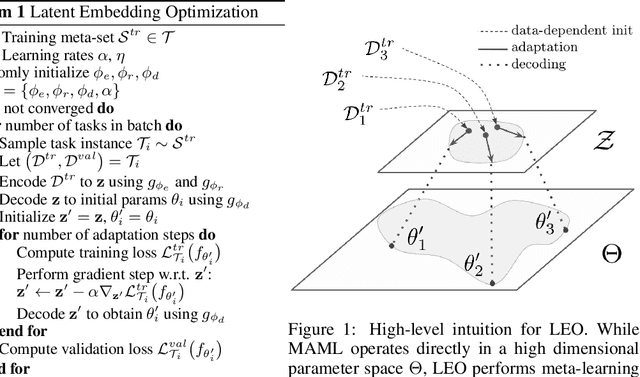
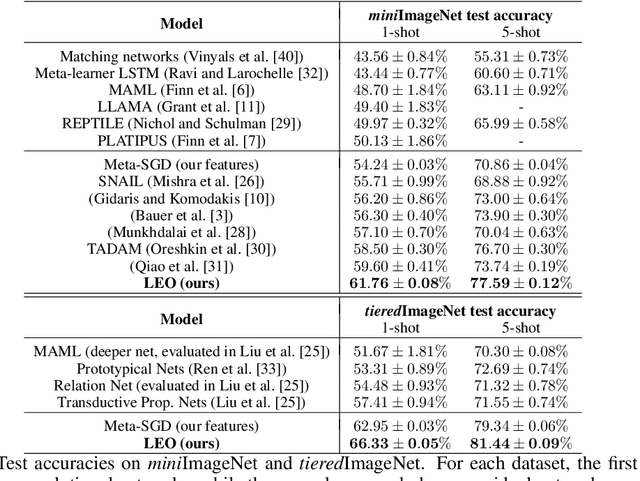
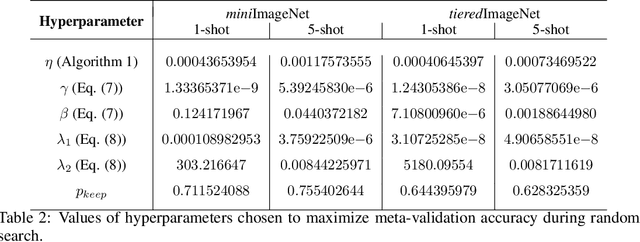
Gradient-based meta-learning techniques are both widely applicable and proficient at solving challenging few-shot learning and fast adaptation problems. However, they have practical difficulties when operating on high-dimensional parameter spaces in extreme low-data regimes. We show that it is possible to bypass these limitations by learning a data-dependent latent generative representation of model parameters, and performing gradient-based meta-learning in this low-dimensional latent space. The resulting approach, latent embedding optimization (LEO), decouples the gradient-based adaptation procedure from the underlying high-dimensional space of model parameters. Our evaluation shows that LEO can achieve state-of-the-art performance on the competitive miniImageNet and tieredImageNet few-shot classification tasks. Further analysis indicates LEO is able to capture uncertainty in the data, and can perform adaptation more effectively by optimizing in latent space.