 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagen 3
Aug 13, 2024We introduce Imagen 3, a latent diffusion model that generates high quality images from text prompts. We describe our quality and responsibility evaluations. Imagen 3 is preferred over other state-of-the-art (SOTA) models at the time of evaluation. In addition, we discuss issues around safety and representation, as well as methods we used to minimize the potential harm of our models.
Genie: Generative Interactive Environments
Feb 23, 2024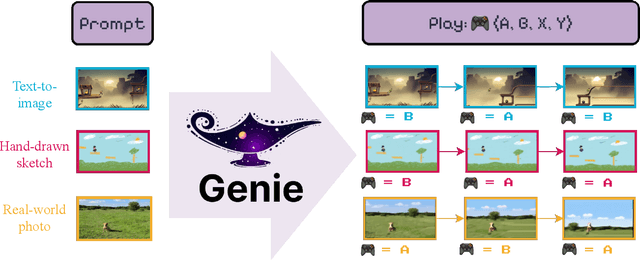
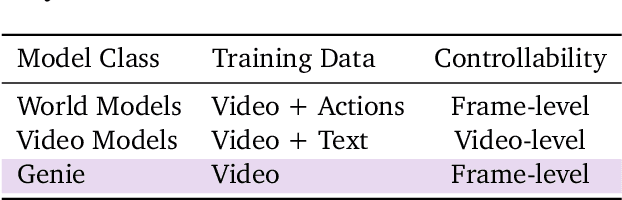
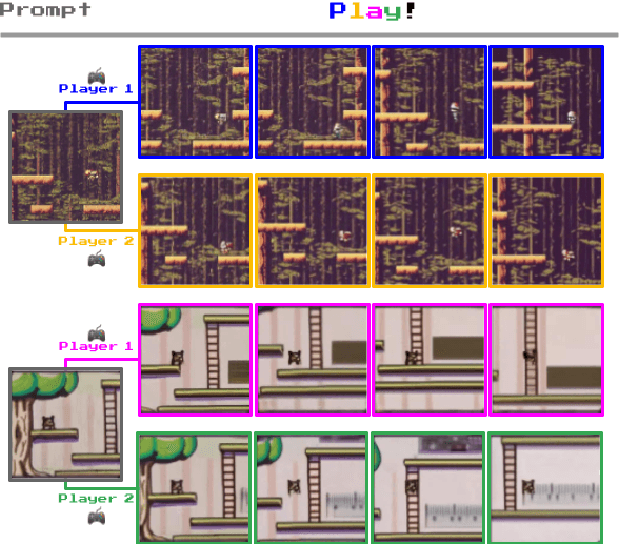
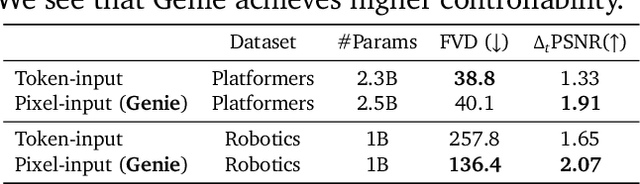
We introduce Genie, the first generative interactive environment trained in an unsupervised manner from unlabelled Internet videos. The model can be prompted to generate an endless variety of action-controllable virtual worlds described through text, synthetic images, photographs, and even sketches. At 11B parameters, Genie can be considered a foundation world model. It is comprised of a spatiotemporal video tokenizer, an autoregressive dynamics model, and a simple and scalable latent action model. Genie enables users to act in the generated environments on a frame-by-frame basis despite training without any ground-truth action labels or other domain-specific requirements typically found in the world model literature. Further the resulting learned latent action space facilitates training agents to imitate behaviors from unseen videos, opening the path for training generalist agents of the future.
GATS: Gather-Attend-Scatter
Jan 16, 2024As the AI community increasingly adopts large-scale models, it is crucial to develop general and flexible tools to integrate them. We introduce Gather-Attend-Scatter (GATS), a novel module that enables seamless combination of pretrained foundation models, both trainable and frozen, into larger multimodal networks. GATS empowers AI systems to process and generate information across multiple modalities at different rates. In contrast to traditional fine-tuning, GATS allows for the original component models to remain frozen, avoiding the risk of them losing important knowledge acquired during the pretraining phase. We demonstrate the utility and versatility of GATS with a few experiments across games, robotics, and multimodal input-output systems.
A Generalist Agent
May 19, 2022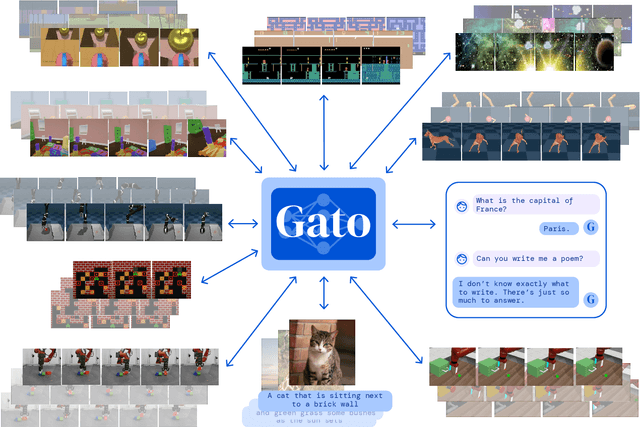
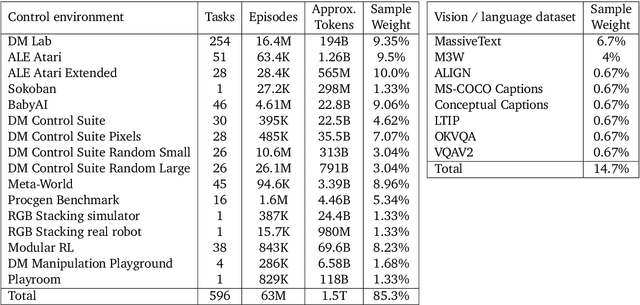
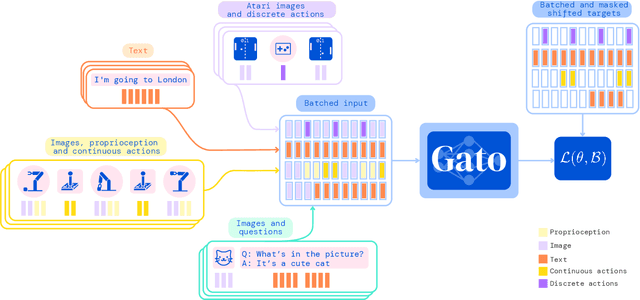

Inspired by progress in large-scale language modeling, we apply a similar approach towards building a single generalist agent beyond the realm of text outputs. The agent, which we refer to as Gato, works as a multi-modal, multi-task, multi-embodiment generalist policy. The same network with the same weights can play Atari, caption images, chat, stack blocks with a real robot arm and much more, deciding based on its context whether to output text, joint torques, button presses, or other tokens. In this report we describe the model and the data, and document the current capabilities of Gato.
Robust Learning-Augmented Caching: An Experimental Study
Jun 28, 2021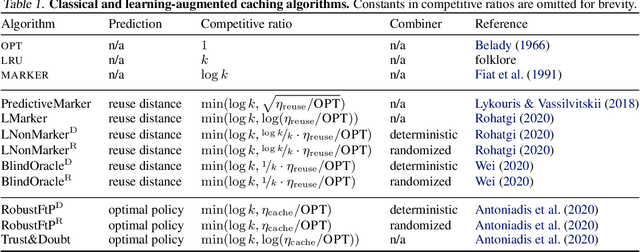
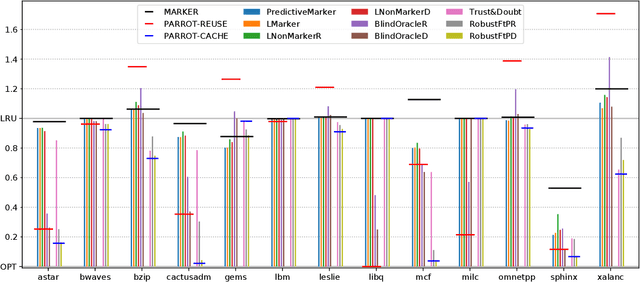

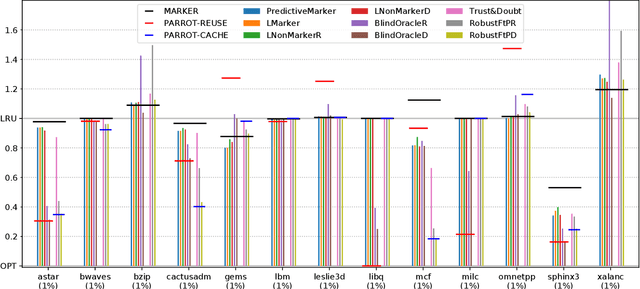
Effective caching is crucial for the performance of modern-day computing systems. A key optimization problem arising in caching -- which item to evict to make room for a new item -- cannot be optimally solved without knowing the future. There are many classical approximation algorithms for this problem, but more recently researchers started to successfully apply machine learning to decide what to evict by discovering implicit input patterns and predicting the future. While machine learning typically does not provide any worst-case guarantees, the new field of learning-augmented algorithms proposes solutions that leverage classical online caching algorithms to make the machine-learned predictors robust. We are the first to comprehensively evaluate these learning-augmented algorithms on real-world caching datasets and state-of-the-art machine-learned predictors. We show that a straightforward method -- blindly following either a predictor or a classical robust algorithm, and switching whenever one becomes worse than the other -- has only a low overhead over a well-performing predictor, while competing with classical methods when the coupled predictor fails, thus providing a cheap worst-case insurance.
Regularized Behavior Value Estimation
Mar 17, 2021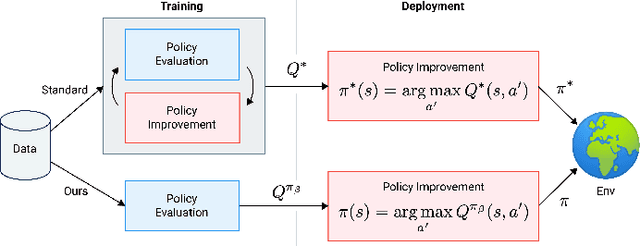
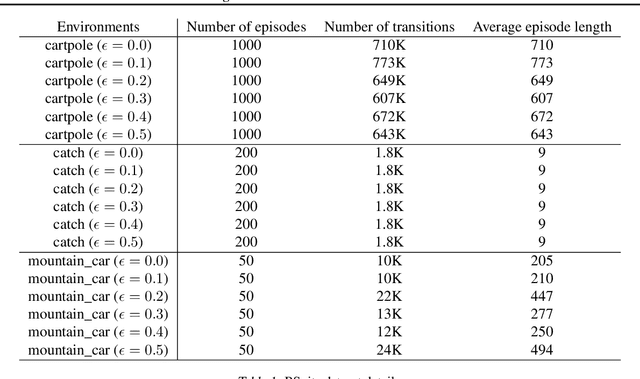
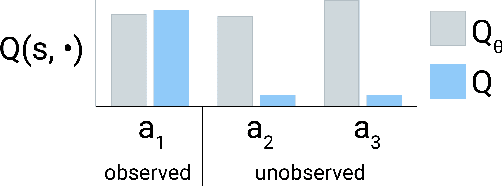
Offline reinforcement learning restricts the learning process to rely only on logged-data without access to an environment. While this enables real-world applications, it also poses unique challenges. One important challenge is dealing with errors caused by the overestimation of values for state-action pairs not well-covered by the training data. Due to bootstrapping, these errors get amplified during training and can lead to divergence, thereby crippling learning. To overcome this challenge, we introduce Regularized Behavior Value Estimation (R-BVE). Unlike most approaches, which use policy improvement during training, R-BVE estimates the value of the behavior policy during training and only performs policy improvement at deployment time. Further, R-BVE uses a ranking regularisation term that favours actions in the dataset that lead to successful outcomes. We provide ample empirical evidence of R-BVE's effectiveness, including state-of-the-art performance on the RL Unplugged ATARI dataset. We also test R-BVE on new datasets, from bsuite and a challenging DeepMind Lab task, and show that R-BVE outperforms other state-of-the-art discrete control offline RL methods.
Semi-supervised reward learning for offline reinforcement learning
Dec 12, 2020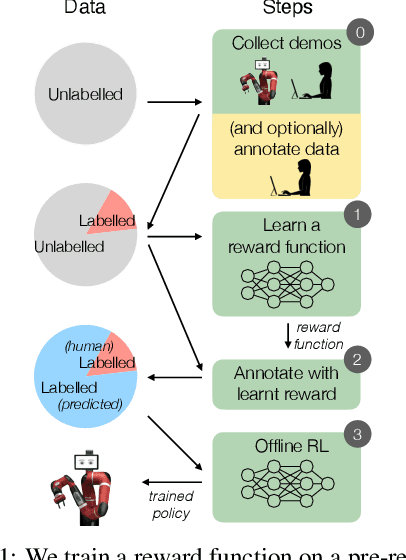
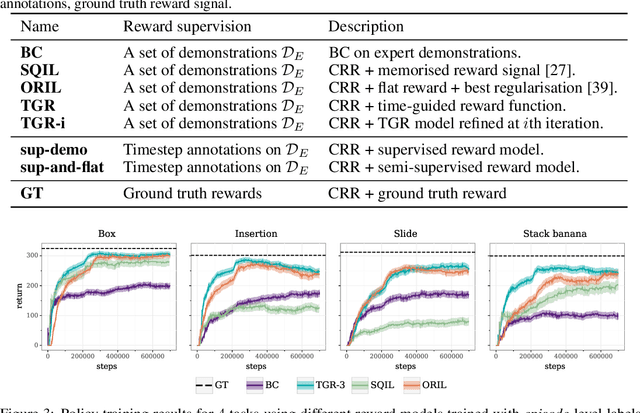
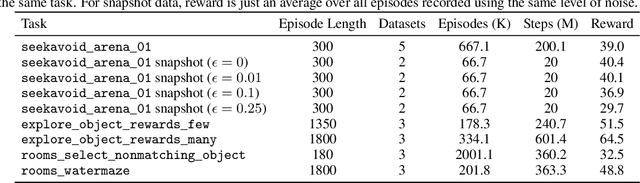
In offline reinforcement learning (RL) agents are trained using a logged dataset. It appears to be the most natural route to attack real-life applications because in domains such as healthcare and robotics interactions with the environment are either expensive or unethical. Training agents usually requires reward functions, but unfortunately, rewards are seldom available in practice and their engineering is challenging and laborious. To overcome this, we investigate reward learning under the constraint of minimizing human reward annotations. We consider two types of supervision: timestep annotations and demonstrations. We propose semi-supervised learning algorithms that learn from limited annotations and incorporate unlabelled data. In our experiments with a simulated robotic arm, we greatly improve upon behavioural cloning and closely approach the performance achieved with ground truth rewards. We further investigate the relationship between the quality of the reward model and the final policies. We notice, for example, that the reward models do not need to be perfect to result in useful policies.
Offline Learning from Demonstrations and Unlabeled Experience
Nov 27, 2020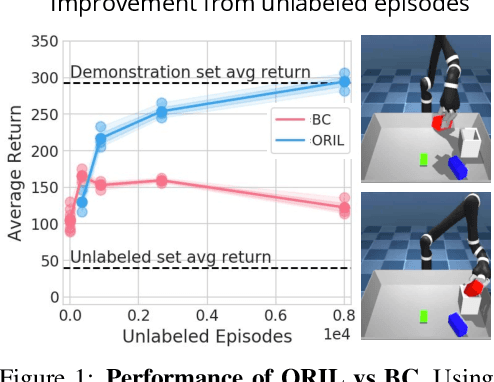
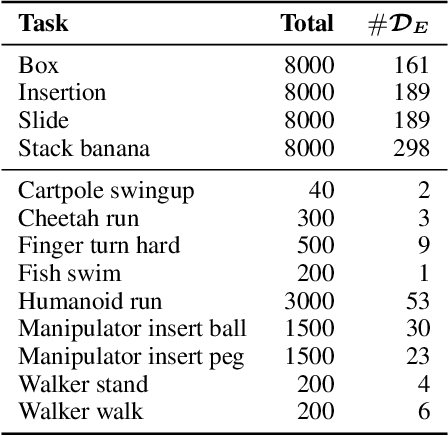
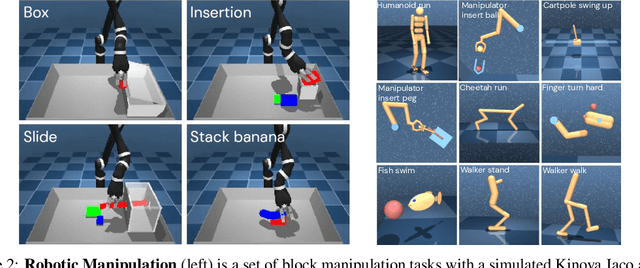
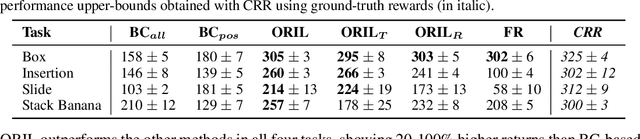
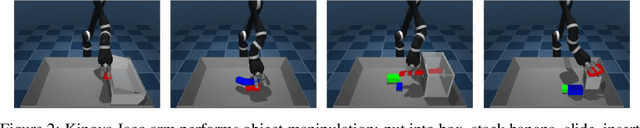
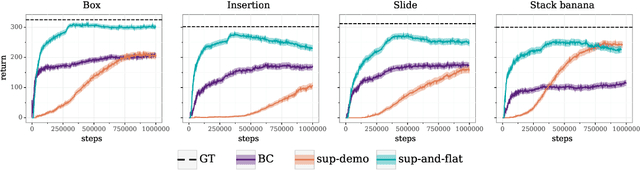
Behavior cloning (BC) is often practical for robot learning because it allows a policy to be trained offline without rewards, by supervised learning on expert demonstrations. However, BC does not effectively leverage what we will refer to as unlabeled experience: data of mixed and unknown quality without reward annotations. This unlabeled data can be generated by a variety of sources such as human teleoperation, scripted policies and other agents on the same robot. Towards data-driven offline robot learning that can use this unlabeled experience, we introduce Offline Reinforced Imitation Learning (ORIL). ORIL first learns a reward function by contrasting observations from demonstrator and unlabeled trajectories, then annotates all data with the learned reward, and finally trains an agent via offline reinforcement learning. Across a diverse set of continuous control and simulated robotic manipulation tasks, we show that ORIL consistently outperforms comparable BC agents by effectively leveraging unlabeled experience.
Hyperparameter Selection for Offline Reinforcement Learning
Jul 17, 2020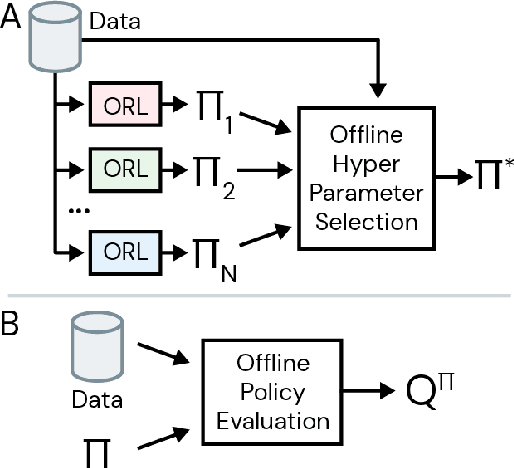
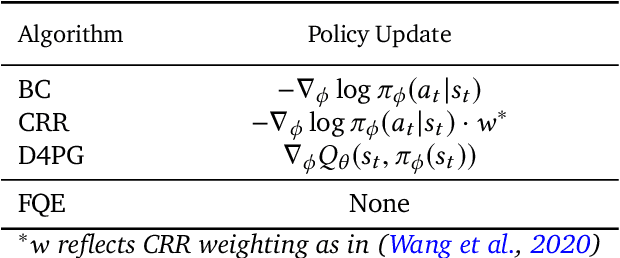
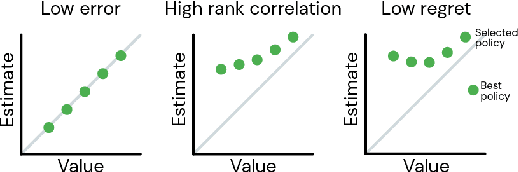
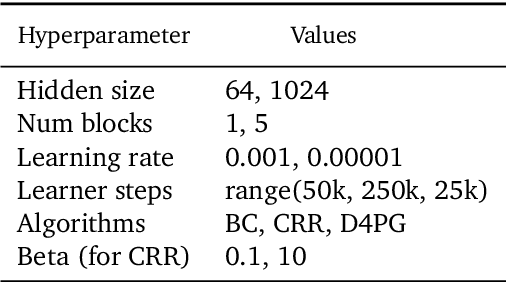
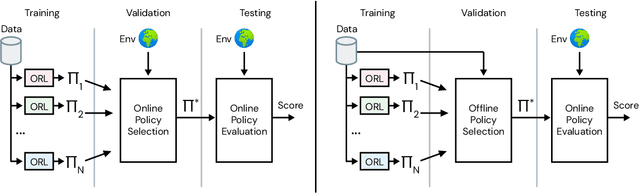
Offline reinforcement learning (RL purely from logged data) is an important avenue for deploying RL techniques in real-world scenarios. However, existing hyperparameter selection methods for offline RL break the offline assumption by evaluating policies corresponding to each hyperparameter setting in the environment. This online execution is often infeasible and hence undermines the main aim of offline RL. Therefore, in this work, we focus on \textit{offline hyperparameter selection}, i.e. methods for choosing the best policy from a set of many policies trained using different hyperparameters, given only logged data. Through large-scale empirical evaluation we show that: 1) offline RL algorithms are not robust to hyperparameter choices, 2) factors such as the offline RL algorithm and method for estimating Q values can have a big impact on hyperparameter selection, and 3) when we control those factors carefully, we can reliably rank policies across hyperparameter choices, and therefore choose policies which are close to the best policy in the set. Overall, our results present an optimistic view that offline hyperparameter selection is within reach, even in challenging tasks with pixel observations, high dimensional action spaces, and long horizon.
RL Unplugged: Benchmarks for Offline Reinforcement Learning
Jul 02, 2020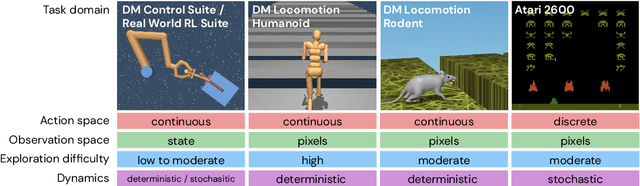
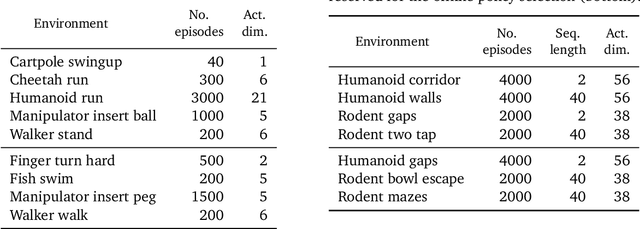
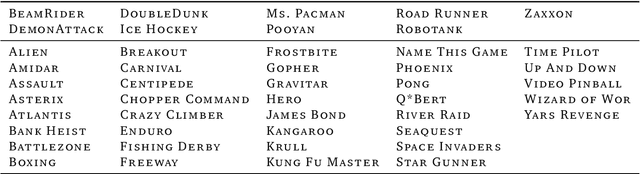
Offline methods for reinforcement learning have a potential to help bridge the gap between reinforcement learning research and real-world applications. They make it possible to learn policies from offline datasets, thus overcoming concerns associated with online data collection in the real-world, including cost, safety, or ethical concerns. In this paper, we propose a benchmark called RL Unplugged to evaluate and compare offline RL methods. RL Unplugged includes data from a diverse range of domains including games ({\em e.g.,} Atari benchmark) and simulated motor control problems ({\em e.g.,} DM Control Suite). The datasets include domains that are partially or fully observable, use continuous or discrete actions, and have stochastic vs. deterministic dynamics. We propose detailed evaluation protocols for each domain in RL Unplugged and provide an extensive analysis of supervised learning and offline RL methods using these protocols. We will release data for all our tasks and open-source all algorithms presented in this paper. We hope that our suite of benchmarks will increase the reproducibility of experiments and make it possible to study challenging tasks with a limited computational budget, thus making RL research both more systematic and more accessible across the community. Moving forward, we view RL Unplugged as a living benchmark suite that will evolve and grow with datasets contributed by the research community and ourselves. Our project page is available on github (https://git.io/JJUhd).