 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception Test: A Diagnostic Benchmark for Multimodal Video Models
May 23, 2023


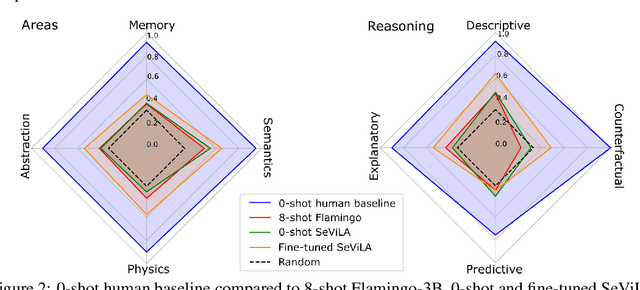
We propose a novel multimodal video benchmark - the Perception Test - to evaluate the perception and reasoning skills of pre-trained multimodal models (e.g. Flamingo, BEiT-3, or GPT-4). Compared to existing benchmarks that focus on computational tasks (e.g. classification, detection or tracking), the Perception Test focuses on skills (Memory, Abstraction, Physics, Semantics) and types of reasoning (descriptive, explanatory, predictive, counterfactual) across video, audio, and text modalities, to provide a comprehensive and efficient evaluation tool. The benchmark probes pre-trained models for their transfer capabilities, in a zero-shot / few-shot or limited finetuning regime. For these purposes, the Perception Test introduces 11.6k real-world videos, 23s average length, designed to show perceptually interesting situations, filmed by around 100 participants worldwide. The videos are densely annotated with six types of labels (multiple-choice and grounded video question-answers, object and point tracks, temporal action and sound segments), enabling both language and non-language evaluations. The fine-tuning and validation splits of the benchmark are publicly available (CC-BY license), in addition to a challenge server with a held-out test split. Human baseline results compared to state-of-the-art video QA models show a significant gap in performance (91.4% vs 43.6%), suggesting that there is significant room for improvement in multimodal video understanding. Dataset, baselines code, and challenge server are available at https://github.com/deepmind/perception_test
A Generalist Agent
May 19, 2022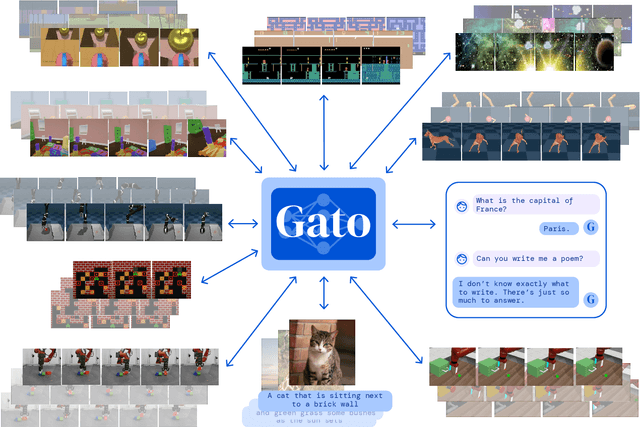
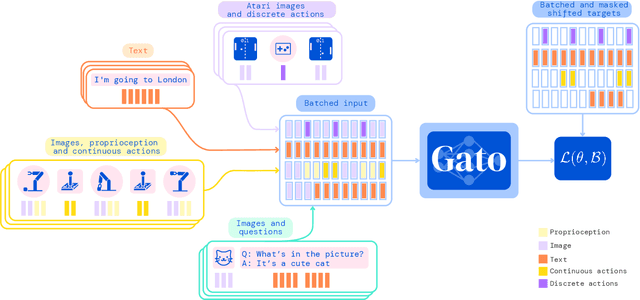

Inspired by progress in large-scale language modeling, we apply a similar approach towards building a single generalist agent beyond the realm of text outputs. The agent, which we refer to as Gato, works as a multi-modal, multi-task, multi-embodiment generalist policy. The same network with the same weights can play Atari, caption images, chat, stack blocks with a real robot arm and much more, deciding based on its context whether to output text, joint torques, button presses, or other tokens. In this report we describe the model and the data, and document the current capabilities of Gato.
Imitation by Predicting Observations
Jul 08, 2021
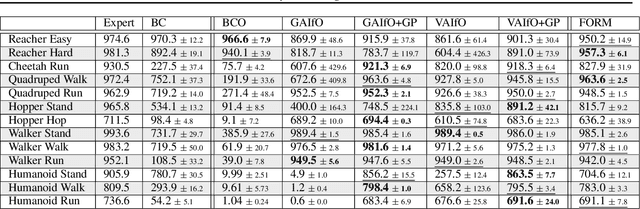


Imitation learning enables agents to reuse and adapt the hard-won expertise of others, offering a solution to several key challenges in learning behavior. Although it is easy to observe behavior in the real-world, the underlying actions may not be accessible. We present a new method for imitation solely from observations that achieves comparable performance to experts on challenging continuous control tasks while also exhibiting robustness in the presence of observations unrelated to the task. Our method, which we call FORM (for "Future Observation Reward Model") is derived from an inverse RL objective and imitates using a model of expert behavior learned by generative modelling of the expert's observations, without needing ground truth actions. We show that FORM performs comparably to a strong baseline IRL method (GAIL) on the DeepMind Control Suite benchmark, while outperforming GAIL in the presence of task-irrelevant features.