 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
A Generalist Agent
May 19, 2022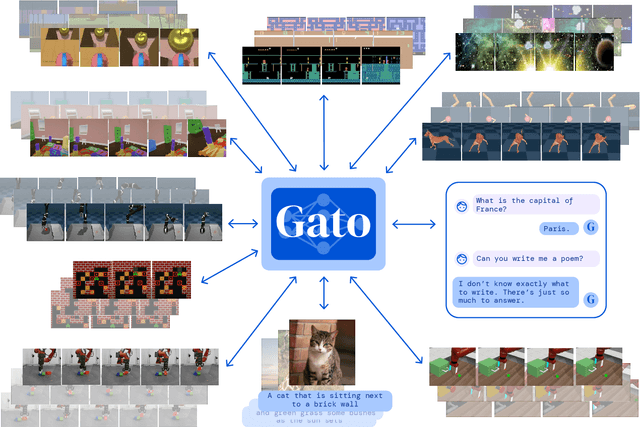
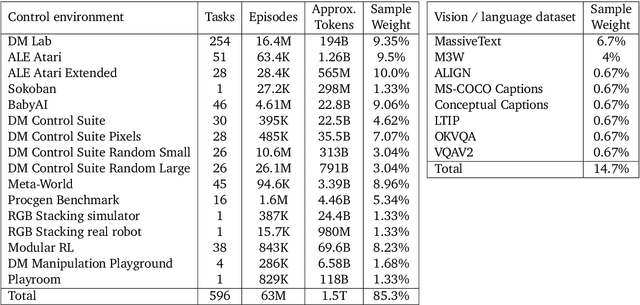
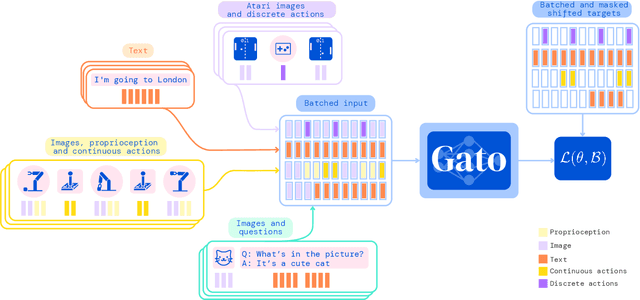

Inspired by progress in large-scale language modeling, we apply a similar approach towards building a single generalist agent beyond the realm of text outputs. The agent, which we refer to as Gato, works as a multi-modal, multi-task, multi-embodiment generalist policy. The same network with the same weights can play Atari, caption images, chat, stack blocks with a real robot arm and much more, deciding based on its context whether to output text, joint torques, button presses, or other tokens. In this report we describe the model and the data, and document the current capabilities of Gato.
Launchpad: A Programming Model for Distributed Machine Learning Research
Jun 07, 2021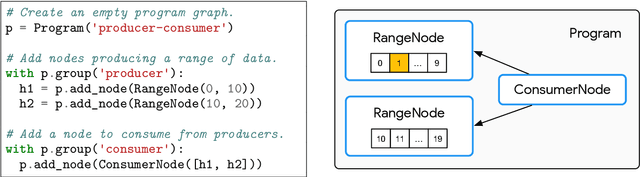
A major driver behind the success of modern machine learning algorithms has been their ability to process ever-larger amounts of data. As a result, the use of distributed systems in both research and production has become increasingly prevalent as a means to scale to this growing data. At the same time, however, distributing the learning process can drastically complicate the implementation of even simple algorithms. This is especially problematic as many machine learning practitioners are not well-versed in the design of distributed systems, let alone those that have complicated communication topologies. In this work we introduce Launchpad, a programming model that simplifies the process of defining and launching distributed systems that is specifically tailored towards a machine learning audience. We describe our framework, its design philosophy and implementation, and give a number of examples of common learning algorithms whose designs are greatly simplified by this approach.
Reverb: A Framework For Experience Replay
Feb 09, 2021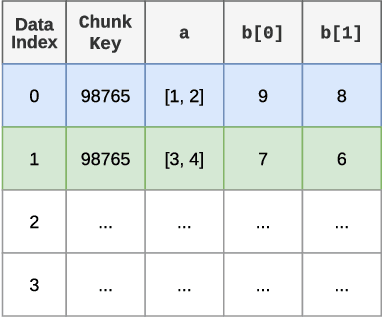
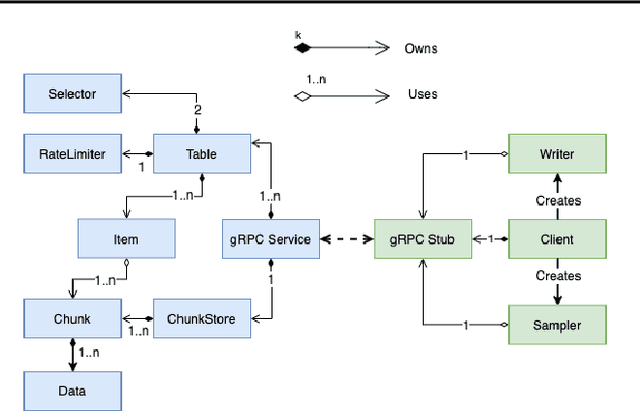
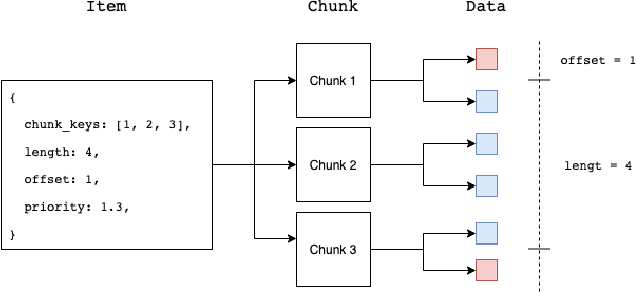
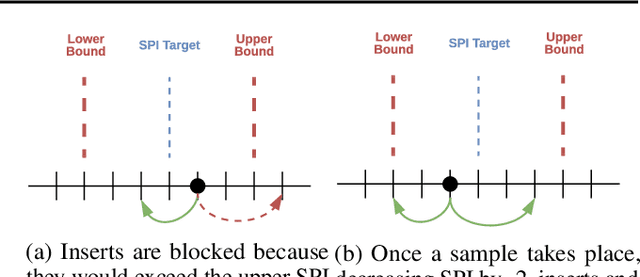
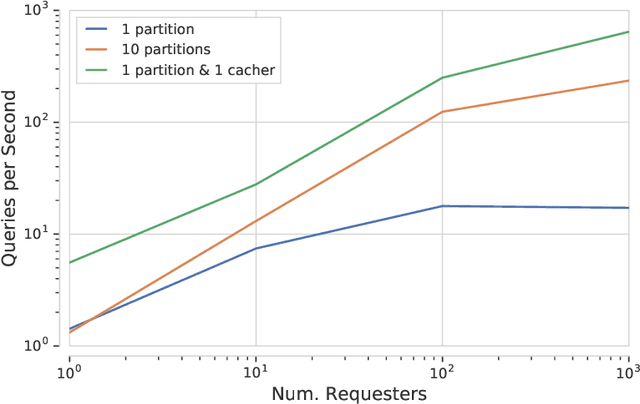
A central component of training in Reinforcement Learning (RL) is Experience: the data used for training. The mechanisms used to generate and consume this data have an important effect on the performance of RL algorithms. In this paper, we introduce Reverb: an efficient, extensible, and easy to use system designed specifically for experience replay in RL. Reverb is designed to work efficiently in distributed configurations with up to thousands of concurrent clients. The flexible API provides users with the tools to easily and accurately configure the replay buffer. It includes strategies for selecting and removing elements from the buffer, as well as options for controlling the ratio between sampled and inserted elements. This paper presents the core design of Reverb, gives examples of how it can be applied, and provides empirical results of Reverb's performance characteristics.
Acme: A Research Framework for Distributed Reinforcement Learning
Jun 01, 2020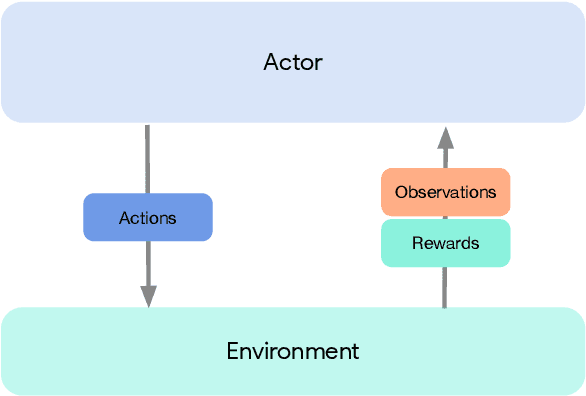
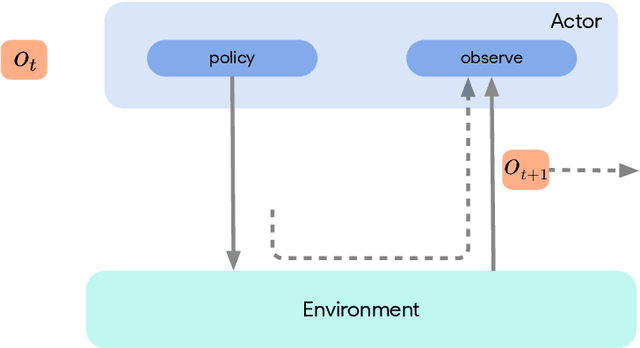
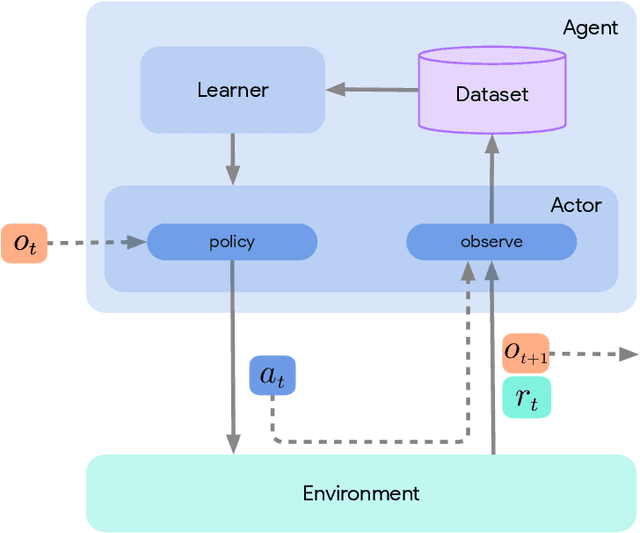
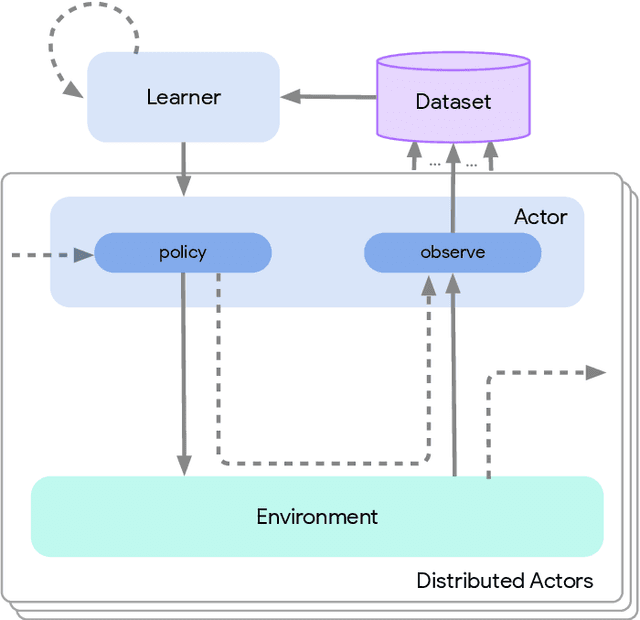
Deep reinforcement learning has led to many recent-and groundbreaking-advancements. However, these advances have often come at the cost of both the scale and complexity of the underlying RL algorithms. Increases in complexity have in turn made it more difficult for researchers to reproduce published RL algorithms or rapidly prototype ideas. To address this, we introduce Acme, a tool to simplify the development of novel RL algorithms that is specifically designed to enable simple agent implementations that can be run at various scales of execution. Our aim is also to make the results of various RL algorithms developed in academia and industrial labs easier to reproduce and extend. To this end we are releasing baseline implementations of various algorithms, created using our framework. In this work we introduce the major design decisions behind Acme and show how these are used to construct these baselines. We also experiment with these agents at different scales of both complexity and computation-including distributed versions. Ultimately, we show that the design decisions behind Acme lead to agents that can be scaled both up and down and that, for the most part, greater levels of parallelization result in agents with equivalent performance, just faster.
Making Efficient Use of Demonstrations to Solve Hard Exploration Problems
Sep 03, 2019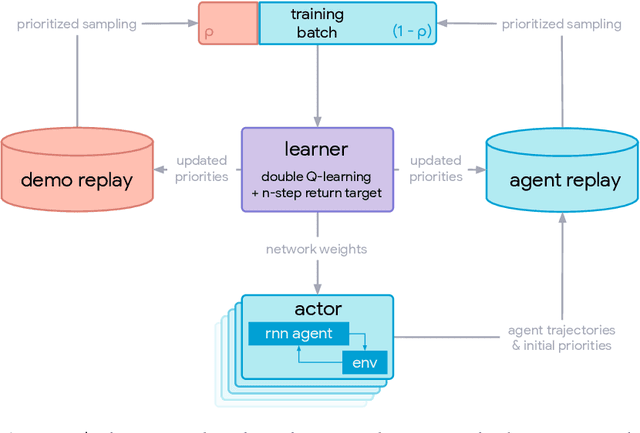
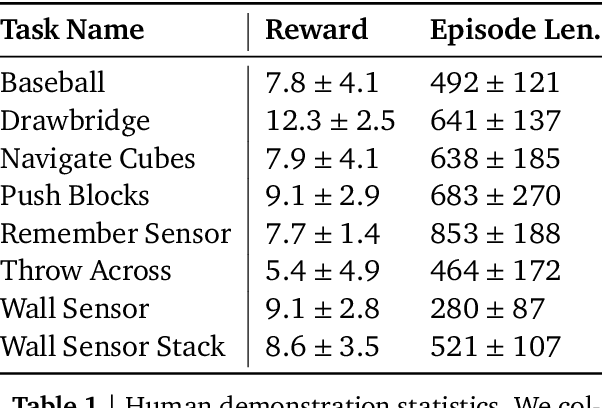
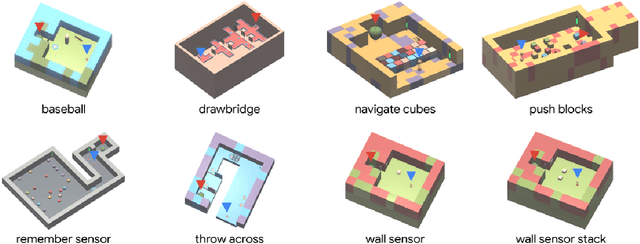
This paper introduces R2D3, an agent that makes efficient use of demonstrations to solve hard exploration problems in partially observable environments with highly variable initial conditions. We also introduce a suite of eight tasks that combine these three properties, and show that R2D3 can solve several of the tasks where other state of the art methods (both with and without demonstrations) fail to see even a single successful trajectory after tens of billions of steps of exploration.
One-Shot High-Fidelity Imitation: Training Large-Scale Deep Nets with RL
Oct 11, 2018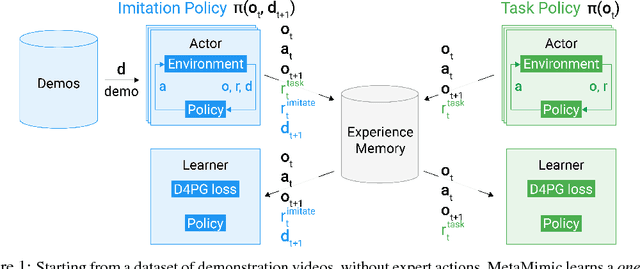
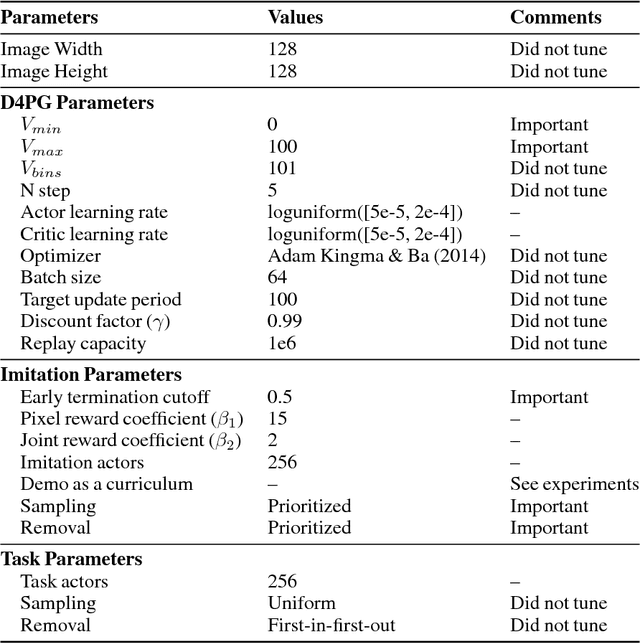
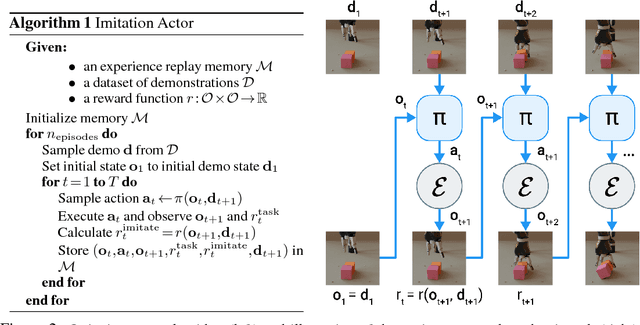
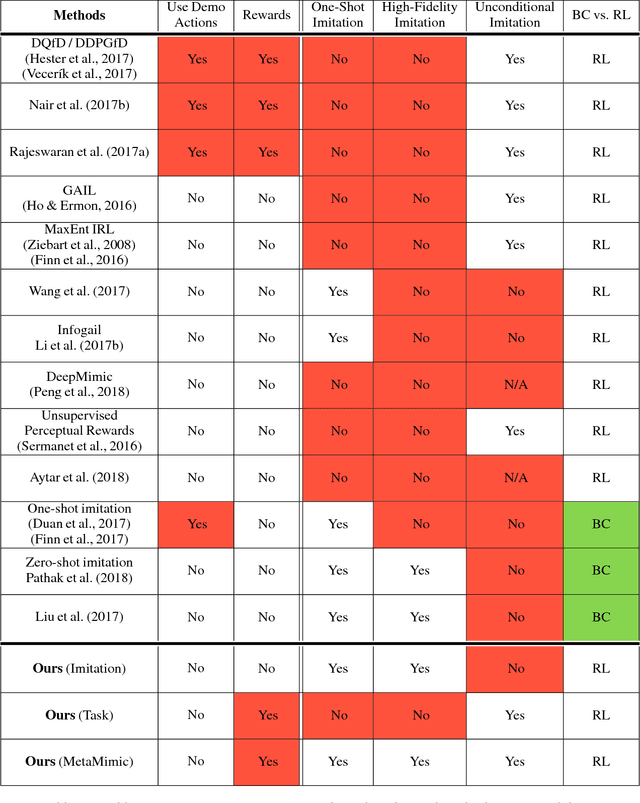
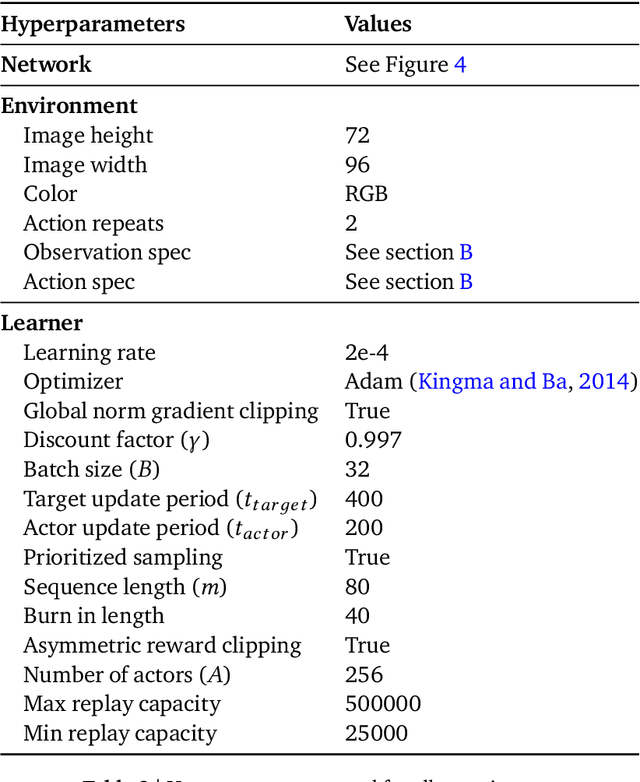
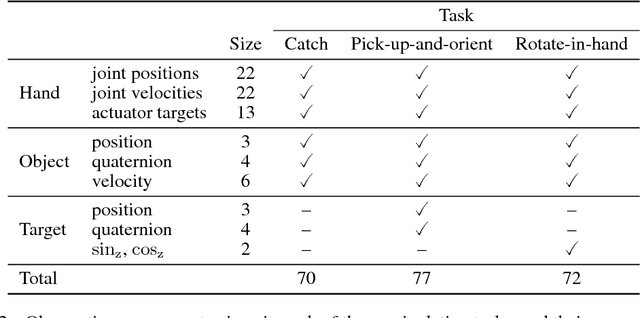
Humans are experts at high-fidelity imitation -- closely mimicking a demonstration, often in one attempt. Humans use this ability to quickly solve a task instance, and to bootstrap learning of new tasks. Achieving these abilities in autonomous agents is an open problem. In this paper, we introduce an off-policy RL algorithm (MetaMimic) to narrow this gap. MetaMimic can learn both (i) policies for high-fidelity one-shot imitation of diverse novel skills, and (ii) policies that enable the agent to solve tasks more efficiently than the demonstrators. MetaMimic relies on the principle of storing all experiences in a memory and replaying these to learn massive deep neural network policies by off-policy RL. This paper introduces, to the best of our knowledge, the largest existing neural networks for deep RL and shows that larger networks with normalization are needed to achieve one-shot high-fidelity imitation on a challenging manipulation task. The results also show that both types of policy can be learned from vision, in spite of the task rewards being sparse, and without access to demonstrator actions.
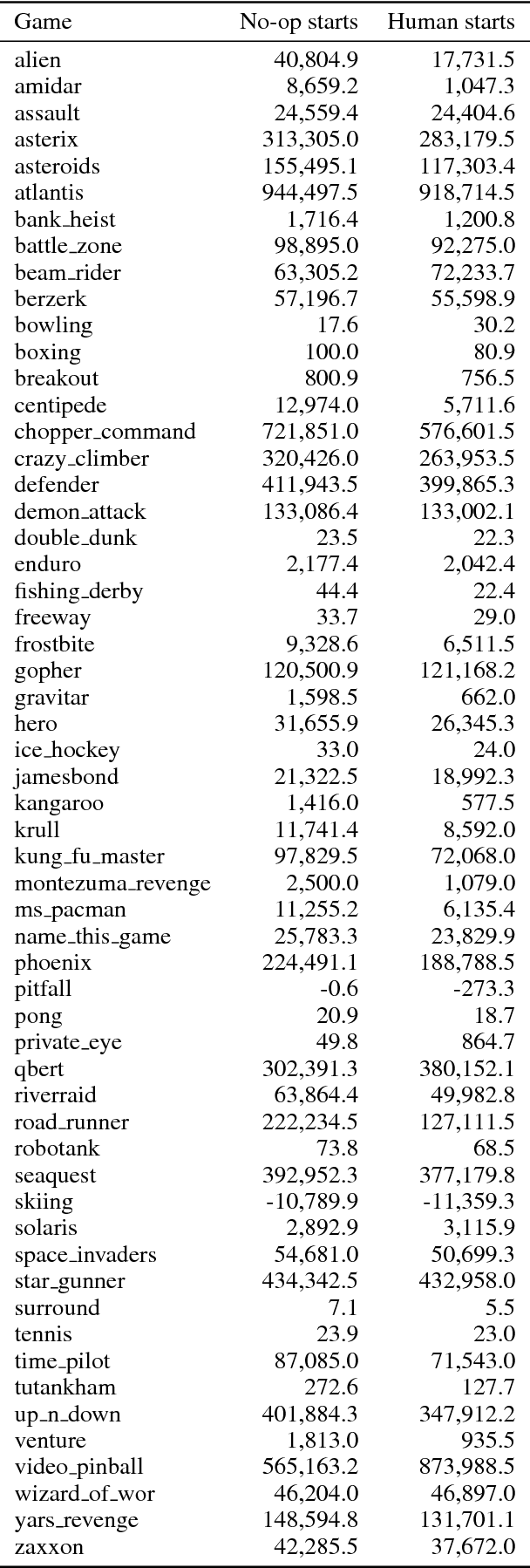
Observe and Look Further: Achieving Consistent Performance on Atari
May 29, 2018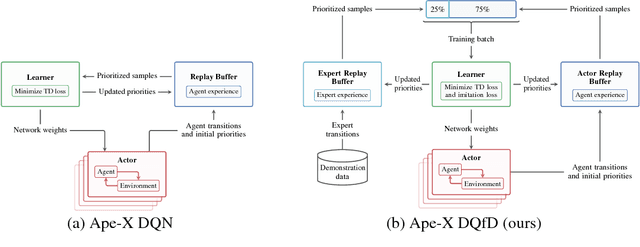
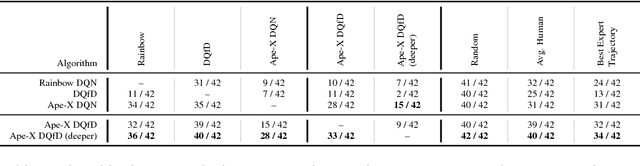
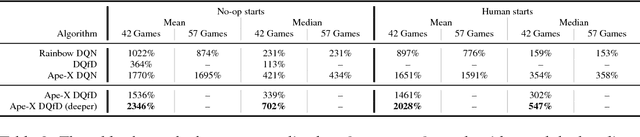
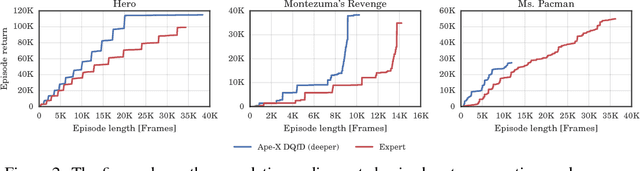
Despite significant advances in the field of deep Reinforcement Learning (RL), today's algorithms still fail to learn human-level policies consistently over a set of diverse tasks such as Atari 2600 games. We identify three key challenges that any algorithm needs to master in order to perform well on all games: processing diverse reward distributions, reasoning over long time horizons, and exploring efficiently. In this paper, we propose an algorithm that addresses each of these challenges and is able to learn human-level policies on nearly all Atari games. A new transformed Bellman operator allows our algorithm to process rewards of varying densities and scales; an auxiliary temporal consistency loss allows us to train stably using a discount factor of $\gamma = 0.999$ (instead of $\gamma = 0.99$) extending the effective planning horizon by an order of magnitude; and we ease the exploration problem by using human demonstrations that guide the agent towards rewarding states. When tested on a set of 42 Atari games, our algorithm exceeds the performance of an average human on 40 games using a common set of hyper parameters. Furthermore, it is the first deep RL algorithm to solve the first level of Montezuma's Revenge.
Distributed Distributional Deterministic Policy Gradients
Apr 23, 2018
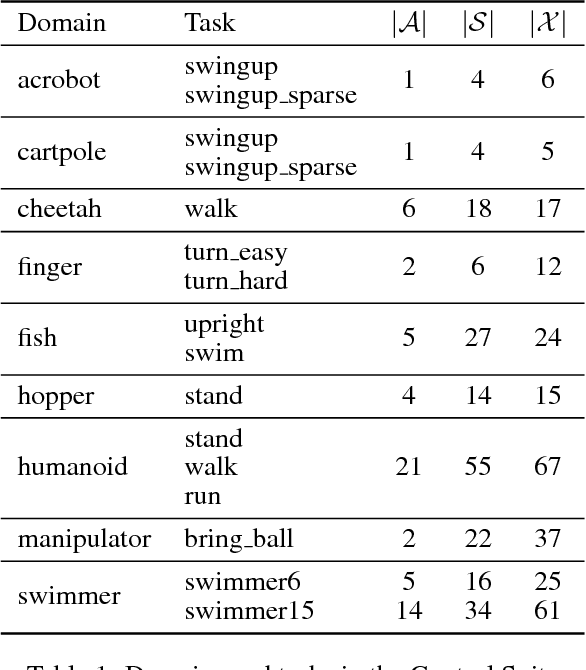
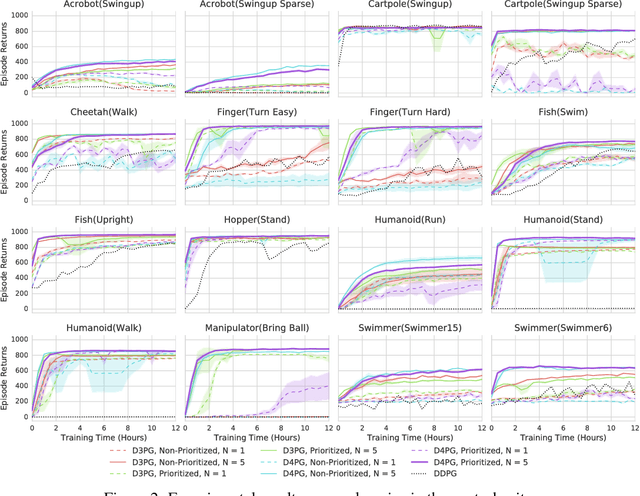
This work adopts the very successful distributional perspective on reinforcement learning and adapts it to the continuous control setting. We combine this within a distributed framework for off-policy learning in order to develop what we call the Distributed Distributional Deep Deterministic Policy Gradient algorithm, D4PG. We also combine this technique with a number of additional, simple improvements such as the use of $N$-step returns and prioritized experience replay. Experimentally we examine the contribution of each of these individual components, and show how they interact, as well as their combined contributions. Our results show that across a wide variety of simple control tasks, difficult manipulation tasks, and a set of hard obstacle-based locomotion tasks the D4PG algorithm achieves state of the art performance.
Distributed Prioritized Experience Replay
Mar 02, 2018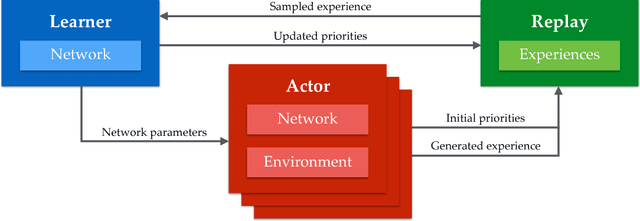
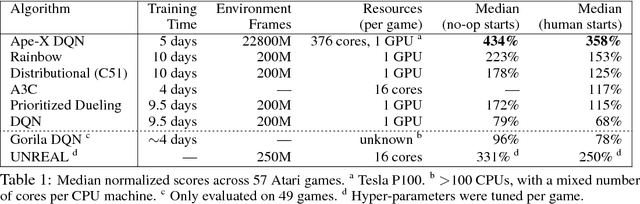
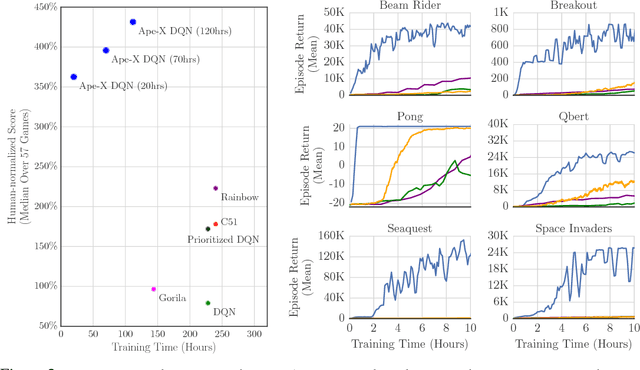
We propose a distributed architecture for deep reinforcement learning at scale, that enables agents to learn effectively from orders of magnitude more data than previously possible. The algorithm decouples acting from learning: the actors interact with their own instances of the environment by selecting actions according to a shared neural network, and accumulate the resulting experience in a shared experience replay memory; the learner replays samples of experience and updates the neural network. The architecture relies on prioritized experience replay to focus only on the most significant data generated by the actors. Our architecture substantially improves the state of the art on the Arcade Learning Environment, achieving better final performance in a fraction of the wall-clock training time.