 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagen 3
Aug 13, 2024We introduce Imagen 3, a latent diffusion model that generates high quality images from text prompts. We describe our quality and responsibility evaluations. Imagen 3 is preferred over other state-of-the-art (SOTA) models at the time of evaluation. In addition, we discuss issues around safety and representation, as well as methods we used to minimize the potential harm of our models.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Reinforced Self-Training (ReST) for Language Modeling
Aug 21, 2023Reinforcement learning from human feedback (RLHF) can improve the quality of large language model's (LLM) outputs by aligning them with human preferences. We propose a simple algorithm for aligning LLMs with human preferences inspired by growing batch reinforcement learning (RL), which we call Reinforced Self-Training (ReST). Given an initial LLM policy, ReST produces a dataset by generating samples from the policy, which are then used to improve the LLM policy using offline RL algorithms. ReST is more efficient than typical online RLHF methods because the training dataset is produced offline, which allows data reuse. While ReST is a general approach applicable to all generative learning settings, we focus on its application to machine translation. Our results show that ReST can substantially improve translation quality, as measured by automated metrics and human evaluation on machine translation benchmarks in a compute and sample-efficient manner.
AlphaStar Unplugged: Large-Scale Offline Reinforcement Learning
Aug 07, 2023



StarCraft II is one of the most challenging simulated reinforcement learning environments; it is partially observable, stochastic, multi-agent, and mastering StarCraft II requires strategic planning over long time horizons with real-time low-level execution. It also has an active professional competitive scene. StarCraft II is uniquely suited for advancing offline RL algorithms, both because of its challenging nature and because Blizzard has released a massive dataset of millions of StarCraft II games played by human players. This paper leverages that and establishes a benchmark, called AlphaStar Unplugged, introducing unprecedented challenges for offline reinforcement learning. We define a dataset (a subset of Blizzard's release), tools standardizing an API for machine learning methods, and an evaluation protocol. We also present baseline agents, including behavior cloning, offline variants of actor-critic and MuZero. We improve the state of the art of agents using only offline data, and we achieve 90% win rate against previously published AlphaStar behavior cloning agent.
$\pi2\text{vec}$: Policy Representations with Successor Features
Jun 16, 2023



This paper describes $\pi2\text{vec}$, a method for representing behaviors of black box policies as feature vectors. The policy representations capture how the statistics of foundation model features change in response to the policy behavior in a task agnostic way, and can be trained from offline data, allowing them to be used in offline policy selection. This work provides a key piece of a recipe for fusing together three modern lines of research: Offline policy evaluation as a counterpart to offline RL, foundation models as generic and powerful state representations, and efficient policy selection in resource constrained environments.
On Instrumental Variable Regression for Deep Offline Policy Evaluation
May 21, 2021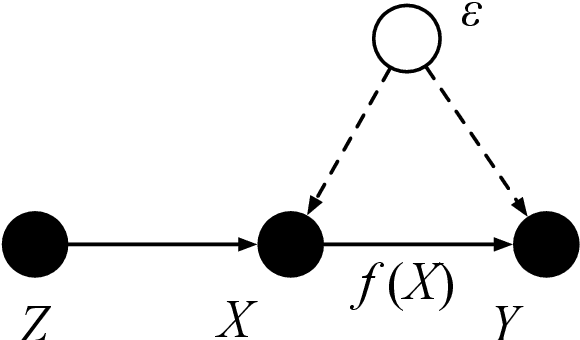
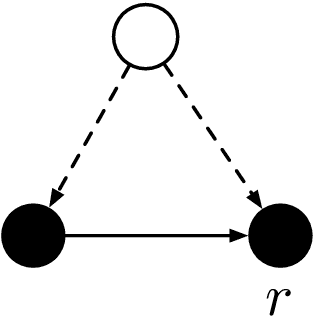
We show that the popular reinforcement learning (RL) strategy of estimating the state-action value (Q-function) by minimizing the mean squared Bellman error leads to a regression problem with confounding, the inputs and output noise being correlated. Hence, direct minimization of the Bellman error can result in significantly biased Q-function estimates. We explain why fixing the target Q-network in Deep Q-Networks and Fitted Q Evaluation provides a way of overcoming this confounding, thus shedding new light on this popular but not well understood trick in the deep RL literature. An alternative approach to address confounding is to leverage techniques developed in the causality literature, notably instrumental variables (IV). We bring together here the literature on IV and RL by investigating whether IV approaches can lead to improved Q-function estimates. This paper analyzes and compares a wide range of recent IV methods in the context of offline policy evaluation (OPE), where the goal is to estimate the value of a policy using logged data only. By applying different IV techniques to OPE, we are not only able to recover previously proposed OPE methods such as model-based techniques but also to obtain competitive new techniques. We find empirically that state-of-the-art OPE methods are closely matched in performance by some IV methods such as AGMM, which were not developed for OPE. We open-source all our code and datasets at https://github.com/liyuan9988/IVOPEwithACME.
Autoregressive Dynamics Models for Offline Policy Evaluation and Optimization
Apr 28, 2021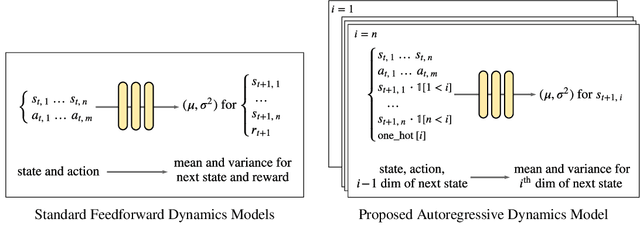

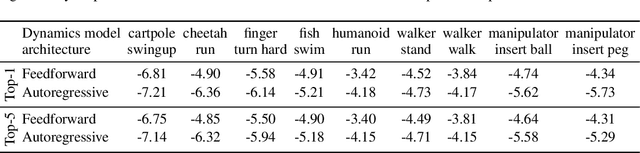
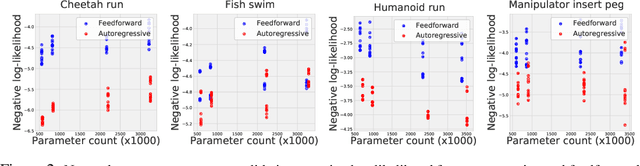
Standard dynamics models for continuous control make use of feedforward computation to predict the conditional distribution of next state and reward given current state and action using a multivariate Gaussian with a diagonal covariance structure. This modeling choice assumes that different dimensions of the next state and reward are conditionally independent given the current state and action and may be driven by the fact that fully observable physics-based simulation environments entail deterministic transition dynamics. In this paper, we challenge this conditional independence assumption and propose a family of expressive autoregressive dynamics models that generate different dimensions of the next state and reward sequentially conditioned on previous dimensions. We demonstrate that autoregressive dynamics models indeed outperform standard feedforward models in log-likelihood on heldout transitions. Furthermore, we compare different model-based and model-free off-policy evaluation (OPE) methods on RL Unplugged, a suite of offline MuJoCo datasets, and find that autoregressive dynamics models consistently outperform all baselines, achieving a new state-of-the-art. Finally, we show that autoregressive dynamics models are useful for offline policy optimization by serving as a way to enrich the replay buffer through data augmentation and improving performance using model-based planning.
Benchmarks for Deep Off-Policy Evaluation
Mar 30, 2021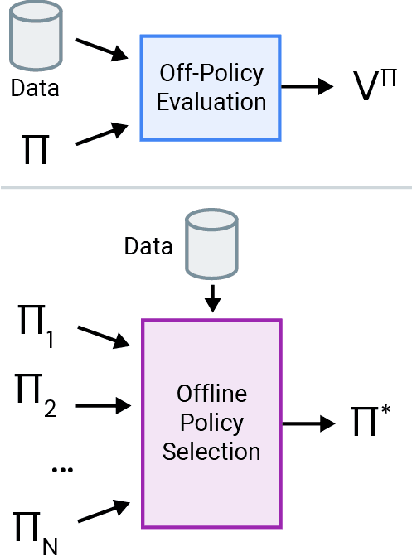
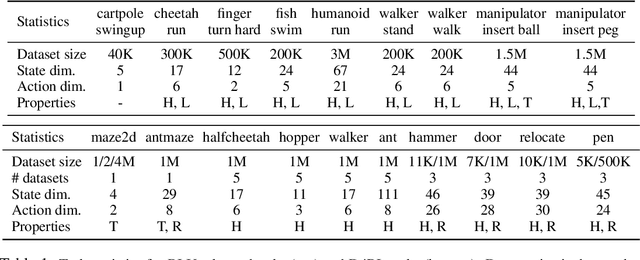
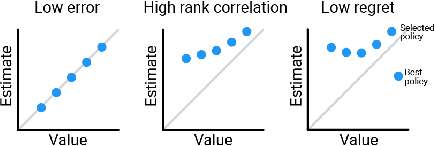
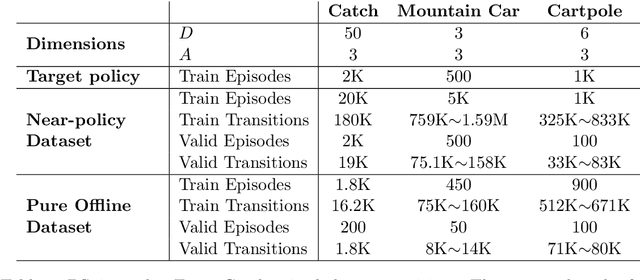
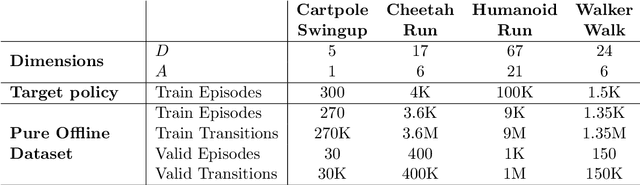
Off-policy evaluation (OPE) holds the promise of being able to leverage large, offline datasets for both evaluating and selecting complex policies for decision making. The ability to learn offline is particularly important in many real-world domains, such as in healthcare, recommender systems, or robotics, where online data collection is an expensive and potentially dangerous process. Being able to accurately evaluate and select high-performing policies without requiring online interaction could yield significant benefits in safety, time, and cost for these applications. While many OPE methods have been proposed in recent years, comparing results between papers is difficult because currently there is a lack of a comprehensive and unified benchmark, and measuring algorithmic progress has been challenging due to the lack of difficult evaluation tasks. In order to address this gap, we present a collection of policies that in conjunction with existing offline datasets can be used for benchmarking off-policy evaluation. Our tasks include a range of challenging high-dimensional continuous control problems, with wide selections of datasets and policies for performing policy selection. The goal of our benchmark is to provide a standardized measure of progress that is motivated from a set of principles designed to challenge and test the limits of existing OPE methods. We perform an evaluation of state-of-the-art algorithms and provide open-source access to our data and code to foster future research in this area.
Hyperparameter Selection for Offline Reinforcement Learning
Jul 17, 2020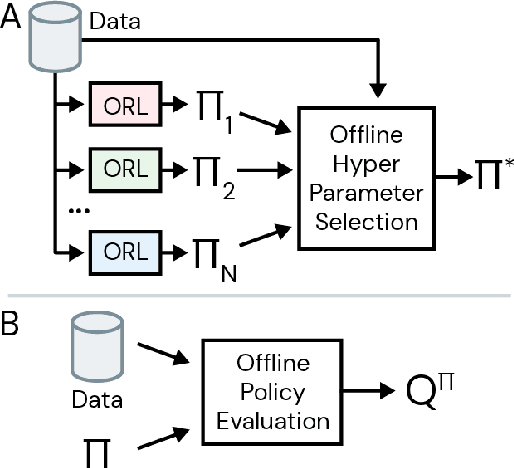
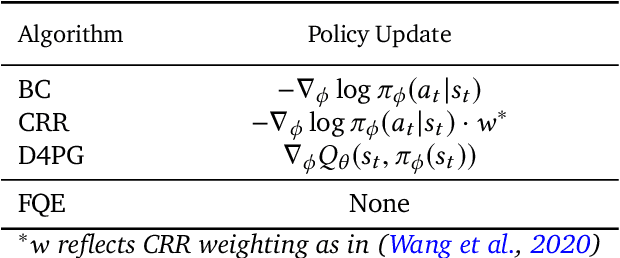
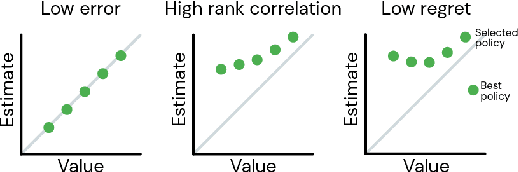
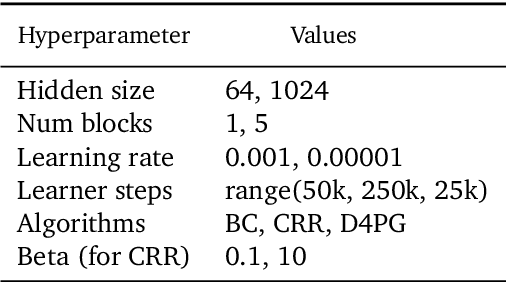
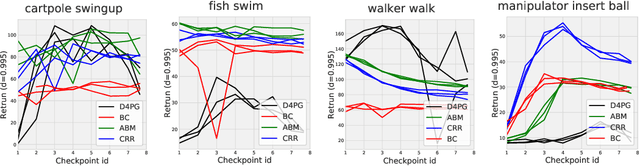
Offline reinforcement learning (RL purely from logged data) is an important avenue for deploying RL techniques in real-world scenarios. However, existing hyperparameter selection methods for offline RL break the offline assumption by evaluating policies corresponding to each hyperparameter setting in the environment. This online execution is often infeasible and hence undermines the main aim of offline RL. Therefore, in this work, we focus on \textit{offline hyperparameter selection}, i.e. methods for choosing the best policy from a set of many policies trained using different hyperparameters, given only logged data. Through large-scale empirical evaluation we show that: 1) offline RL algorithms are not robust to hyperparameter choices, 2) factors such as the offline RL algorithm and method for estimating Q values can have a big impact on hyperparameter selection, and 3) when we control those factors carefully, we can reliably rank policies across hyperparameter choices, and therefore choose policies which are close to the best policy in the set. Overall, our results present an optimistic view that offline hyperparameter selection is within reach, even in challenging tasks with pixel observations, high dimensional action spaces, and long horizon.