 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo Language Planning
Oct 16, 2023We are interested in enabling visual planning for complex long-horizon tasks in the space of generated videos and language, leveraging recent advances in large generative models pretrained on Internet-scale data. To this end, we present video language planning (VLP), an algorithm that consists of a tree search procedure, where we train (i) vision-language models to serve as both policies and value functions, and (ii) text-to-video models as dynamics models. VLP takes as input a long-horizon task instruction and current image observation, and outputs a long video plan that provides detailed multimodal (video and language) specifications that describe how to complete the final task. VLP scales with increasing computation budget where more computation time results in improved video plans, and is able to synthesize long-horizon video plans across different robotics domains: from multi-object rearrangement, to multi-camera bi-arm dexterous manipulation. Generated video plans can be translated into real robot actions via goal-conditioned policies, conditioned on each intermediate frame of the generated video. Experiments show that VLP substantially improves long-horizon task success rates compared to prior methods on both simulated and real robots (across 3 hardware platforms).
Learning Interactive Real-World Simulators
Oct 09, 2023



Generative models trained on internet data have revolutionized how text, image, and video content can be created. Perhaps the next milestone for generative models is to simulate realistic experience in response to actions taken by humans, robots, and other interactive agents. Applications of a real-world simulator range from controllable content creation in games and movies, to training embodied agents purely in simulation that can be directly deployed in the real world. We explore the possibility of learning a universal simulator (UniSim) of real-world interaction through generative modeling. We first make the important observation that natural datasets available for learning a real-world simulator are often rich along different axes (e.g., abundant objects in image data, densely sampled actions in robotics data, and diverse movements in navigation data). With careful orchestration of diverse datasets, each providing a different aspect of the overall experience, UniSim can emulate how humans and agents interact with the world by simulating the visual outcome of both high-level instructions such as "open the drawer" and low-level controls such as "move by x, y" from otherwise static scenes and objects. There are numerous use cases for such a real-world simulator. As an example, we use UniSim to train both high-level vision-language planners and low-level reinforcement learning policies, each of which exhibit zero-shot real-world transfer after training purely in a learned real-world simulator. We also show that other types of intelligence such as video captioning models can benefit from training with simulated experience in UniSim, opening up even wider applications. Video demos can be found at https://universal-simulator.github.io.
Probabilistic Adaptation of Text-to-Video Models
Jun 02, 2023



Large text-to-video models trained on internet-scale data have demonstrated exceptional capabilities in generating high-fidelity videos from arbitrary textual descriptions. However, adapting these models to tasks with limited domain-specific data, such as animation or robotics videos, poses a significant computational challenge, since finetuning a pretrained large model can be prohibitively expensive. Inspired by how a small modifiable component (e.g., prompts, prefix-tuning) can adapt a large language model to perform new tasks without requiring access to the model weights, we investigate how to adapt a large pretrained text-to-video model to a variety of downstream domains and tasks without finetuning. In answering this question, we propose Video Adapter, which leverages the score function of a large pretrained video diffusion model as a probabilistic prior to guide the generation of a task-specific small video model. Our experiments show that Video Adapter is capable of incorporating the broad knowledge and preserving the high fidelity of a large pretrained video model in a task-specific small video model that is able to generate high-quality yet specialized videos on a variety of tasks such as animation, egocentric modeling, and modeling of simulated and real-world robotics data. More videos can be found on the website https://video-adapter.github.io/.
Learning Universal Policies via Text-Guided Video Generation
Feb 02, 2023



A goal of artificial intelligence is to construct an agent that can solve a wide variety of tasks. Recent progress in text-guided image synthesis has yielded models with an impressive ability to generate complex novel images, exhibiting combinatorial generalization across domains. Motivated by this success, we investigate whether such tools can be used to construct more general-purpose agents. Specifically, we cast the sequential decision making problem as a text-conditioned video generation problem, where, given a text-encoded specification of a desired goal, a planner synthesizes a set of future frames depicting its planned actions in the future, after which control actions are extracted from the generated video. By leveraging text as the underlying goal specification, we are able to naturally and combinatorially generalize to novel goals. The proposed policy-as-video formulation can further represent environments with different state and action spaces in a unified space of images, which, for example, enables learning and generalization across a variety of robot manipulation tasks. Finally, by leveraging pretrained language embeddings and widely available videos from the internet, the approach enables knowledge transfer through predicting highly realistic video plans for real robots.
Dichotomy of Control: Separating What You Can Control from What You Cannot
Oct 24, 2022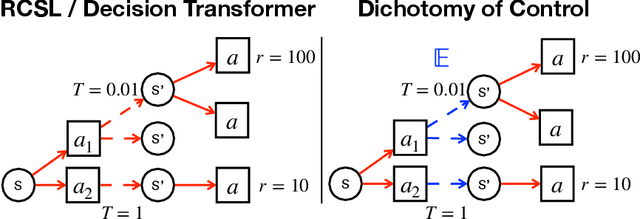
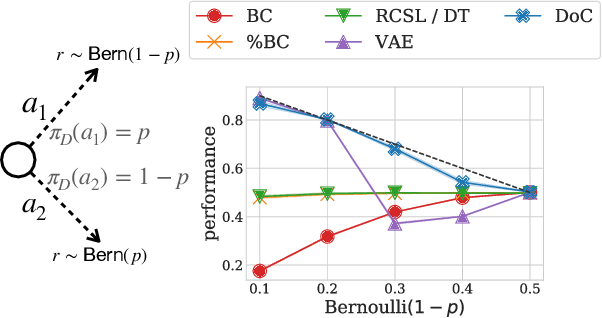
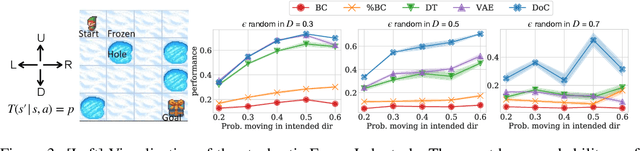
Future- or return-conditioned supervised learning is an emerging paradigm for offline reinforcement learning (RL), where the future outcome (i.e., return) associated with an observed action sequence is used as input to a policy trained to imitate those same actions. While return-conditioning is at the heart of popular algorithms such as decision transformer (DT), these methods tend to perform poorly in highly stochastic environments, where an occasional high return can arise from randomness in the environment rather than the actions themselves. Such situations can lead to a learned policy that is inconsistent with its conditioning inputs; i.e., using the policy to act in the environment, when conditioning on a specific desired return, leads to a distribution of real returns that is wildly different than desired. In this work, we propose the dichotomy of control (DoC), a future-conditioned supervised learning framework that separates mechanisms within a policy's control (actions) from those beyond a policy's control (environment stochasticity). We achieve this separation by conditioning the policy on a latent variable representation of the future, and designing a mutual information constraint that removes any information from the latent variable associated with randomness in the environment. Theoretically, we show that DoC yields policies that are consistent with their conditioning inputs, ensuring that conditioning a learned policy on a desired high-return future outcome will correctly induce high-return behavior. Empirically, we show that DoC is able to achieve significantly better performance than DT on environments that have highly stochastic rewards and transition
Making Linear MDPs Practical via Contrastive Representation Learning
Jul 14, 2022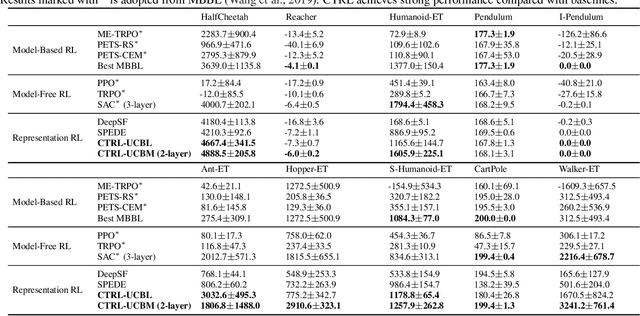
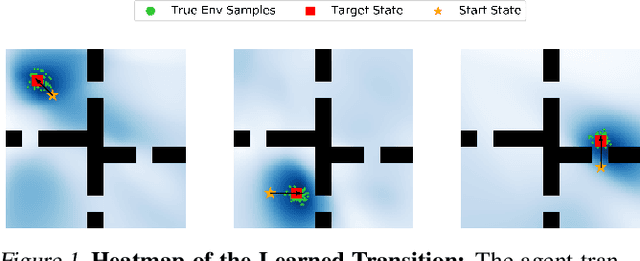

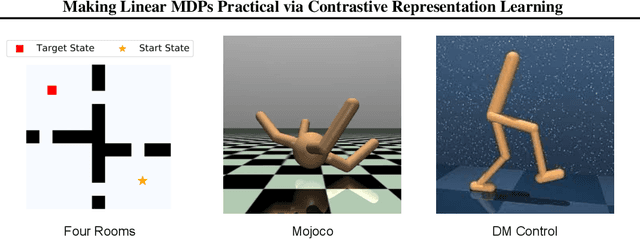
It is common to address the curse of dimensionality in Markov decision processes (MDPs) by exploiting low-rank representations. This motivates much of the recent theoretical study on linear MDPs. However, most approaches require a given representation under unrealistic assumptions about the normalization of the decomposition or introduce unresolved computational challenges in practice. Instead, we consider an alternative definition of linear MDPs that automatically ensures normalization while allowing efficient representation learning via contrastive estimation. The framework also admits confidence-adjusted index algorithms, enabling an efficient and principled approach to incorporating optimism or pessimism in the face of uncertainty. To the best of our knowledge, this provides the first practical representation learning method for linear MDPs that achieves both strong theoretical guarantees and empirical performance. Theoretically, we prove that the proposed algorithm is sample efficient in both the online and offline settings. Empirically, we demonstrate superior performance over existing state-of-the-art model-based and model-free algorithms on several benchmarks.
Multi-Game Decision Transformers
May 30, 2022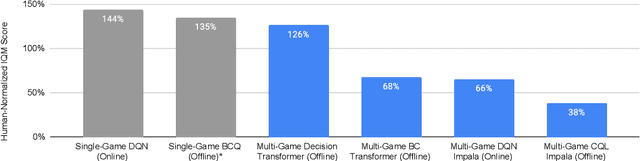

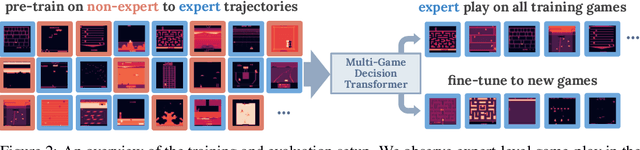
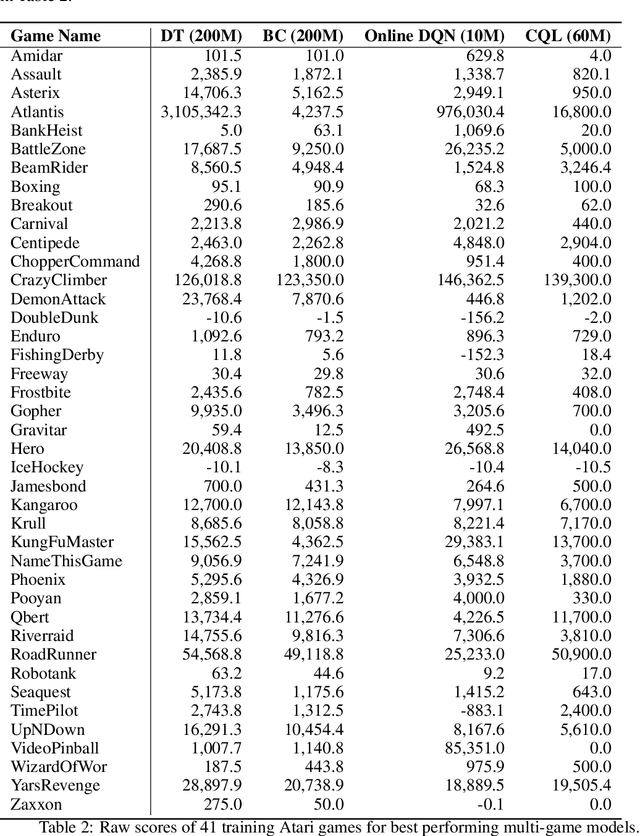
A longstanding goal of the field of AI is a strategy for compiling diverse experience into a highly capable, generalist agent. In the subfields of vision and language, this was largely achieved by scaling up transformer-based models and training them on large, diverse datasets. Motivated by this progress, we investigate whether the same strategy can be used to produce generalist reinforcement learning agents. Specifically, we show that a single transformer-based model - with a single set of weights - trained purely offline can play a suite of up to 46 Atari games simultaneously at close-to-human performance. When trained and evaluated appropriately, we find that the same trends observed in language and vision hold, including scaling of performance with model size and rapid adaptation to new games via fine-tuning. We compare several approaches in this multi-game setting, such as online and offline RL methods and behavioral cloning, and find that our Multi-Game Decision Transformer models offer the best scalability and performance. We release the pre-trained models and code to encourage further research in this direction. Additional information, videos and code can be seen at: sites.google.com/view/multi-game-transformers
Chain of Thought Imitation with Procedure Cloning
May 22, 2022
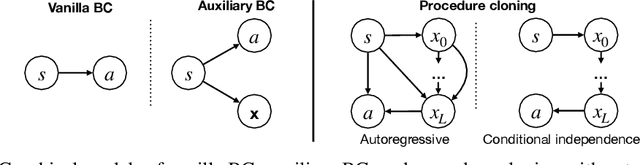

Imitation learning aims to extract high-performance policies from logged demonstrations of expert behavior. It is common to frame imitation learning as a supervised learning problem in which one fits a function approximator to the input-output mapping exhibited by the logged demonstrations (input observations to output actions). While the framing of imitation learning as a supervised input-output learning problem allows for applicability in a wide variety of settings, it is also an overly simplistic view of the problem in situations where the expert demonstrations provide much richer insight into expert behavior. For example, applications such as path navigation, robot manipulation, and strategy games acquire expert demonstrations via planning, search, or some other multi-step algorithm, revealing not just the output action to be imitated but also the procedure for how to determine this action. While these intermediate computations may use tools not available to the agent during inference (e.g., environment simulators), they are nevertheless informative as a way to explain an expert's mapping of state to actions. To properly leverage expert procedure information without relying on the privileged tools the expert may have used to perform the procedure, we propose procedure cloning, which applies supervised sequence prediction to imitate the series of expert computations. This way, procedure cloning learns not only what to do (i.e., the output action), but how and why to do it (i.e., the procedure). Through empirical analysis on navigation, simulated robotic manipulation, and game-playing environments, we show that imitating the intermediate computations of an expert's behavior enables procedure cloning to learn policies exhibiting significant generalization to unseen environment configurations, including those configurations for which running the expert's procedure directly is infeasible.
Context-Aware Language Modeling for Goal-Oriented Dialogue Systems
Apr 22, 2022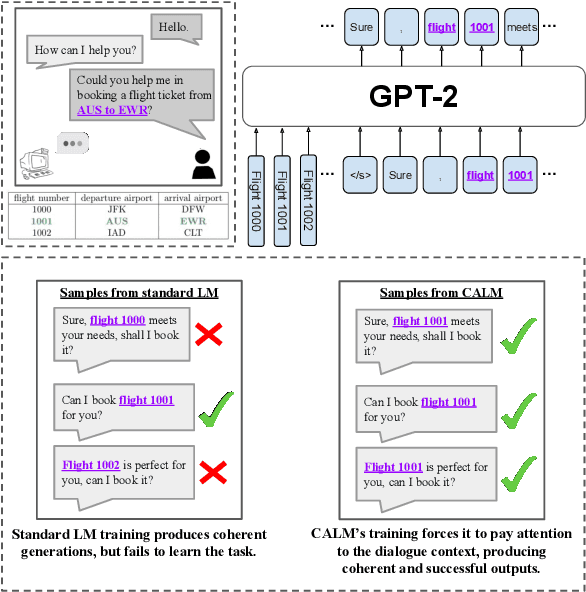
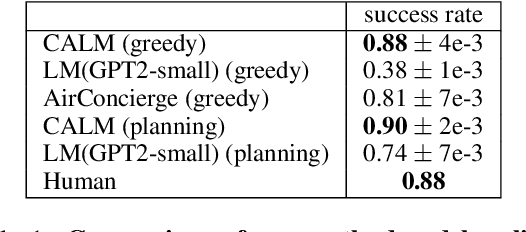


Goal-oriented dialogue systems face a trade-off between fluent language generation and task-specific control. While supervised learning with large language models is capable of producing realistic text, how to steer such responses towards completing a specific task without sacrificing language quality remains an open question. In this work, we formulate goal-oriented dialogue as a partially observed Markov decision process, interpreting the language model as a representation of both the dynamics and the policy. This view allows us to extend techniques from learning-based control, such as task relabeling, to derive a simple and effective method to finetune language models in a goal-aware way, leading to significantly improved task performance. We additionally introduce a number of training strategies that serve to better focus the model on the task at hand. We evaluate our method, Context-Aware Language Models (CALM), on a practical flight-booking task using AirDialogue. Empirically, CALM outperforms the state-of-the-art method by 7% in terms of task success, matching human-level task performance.
CHAI: A CHatbot AI for Task-Oriented Dialogue with Offline Reinforcement Learning
Apr 18, 2022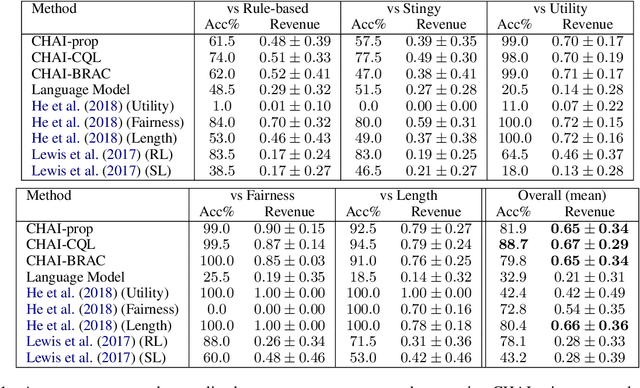
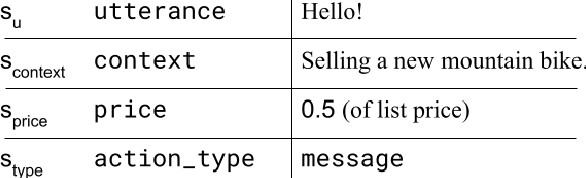

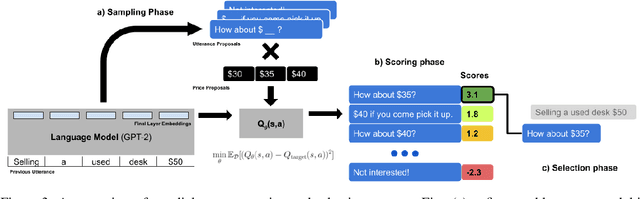
Conventionally, generation of natural language for dialogue agents may be viewed as a statistical learning problem: determine the patterns in human-provided data and generate appropriate responses with similar statistical properties. However, dialogue can also be regarded as a goal directed process, where speakers attempt to accomplish a specific task. Reinforcement learning (RL) algorithms are designed specifically for solving such goal-directed problems, but the most direct way to apply RL -- through trial-and-error learning in human conversations, -- is costly. In this paper, we study how offline reinforcement learning can instead be used to train dialogue agents entirely using static datasets collected from human speakers. Our experiments show that recently developed offline RL methods can be combined with language models to yield realistic dialogue agents that better accomplish task goals.