 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDichotomy of Control: Separating What You Can Control from What You Cannot
Paper and Code
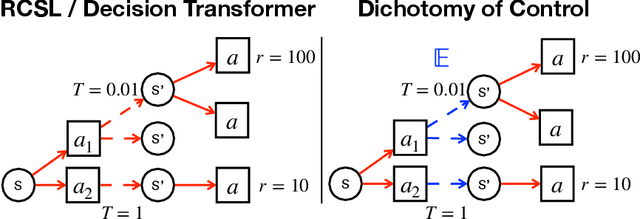
Future- or return-conditioned supervised learning is an emerging paradigm for offline reinforcement learning (RL), where the future outcome (i.e., return) associated with an observed action sequence is used as input to a policy trained to imitate those same actions. While return-conditioning is at the heart of popular algorithms such as decision transformer (DT), these methods tend to perform poorly in highly stochastic environments, where an occasional high return can arise from randomness in the environment rather than the actions themselves. Such situations can lead to a learned policy that is inconsistent with its conditioning inputs; i.e., using the policy to act in the environment, when conditioning on a specific desired return, leads to a distribution of real returns that is wildly different than desired. In this work, we propose the dichotomy of control (DoC), a future-conditioned supervised learning framework that separates mechanisms within a policy's control (actions) from those beyond a policy's control (environment stochasticity). We achieve this separation by conditioning the policy on a latent variable representation of the future, and designing a mutual information constraint that removes any information from the latent variable associated with randomness in the environment. Theoretically, we show that DoC yields policies that are consistent with their conditioning inputs, ensuring that conditioning a learned policy on a desired high-return future outcome will correctly induce high-return behavior. Empirically, we show that DoC is able to achieve significantly better performance than DT on environments that have highly stochastic rewards and transition