 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Agent Behaviors with RL Fine-tuning for Autonomous Driving
Sep 26, 2024



A major challenge in autonomous vehicle research is modeling agent behaviors, which has critical applications including constructing realistic and reliable simulations for off-board evaluation and forecasting traffic agents motion for onboard planning. While supervised learning has shown success in modeling agents across various domains, these models can suffer from distribution shift when deployed at test-time. In this work, we improve the reliability of agent behaviors by closed-loop fine-tuning of behavior models with reinforcement learning. Our method demonstrates improved overall performance, as well as improved targeted metrics such as collision rate, on the Waymo Open Sim Agents challenge. Additionally, we present a novel policy evaluation benchmark to directly assess the ability of simulated agents to measure the quality of autonomous vehicle planners and demonstrate the effectiveness of our approach on this new benchmark.
Waymax: An Accelerated, Data-Driven Simulator for Large-Scale Autonomous Driving Research
Oct 12, 2023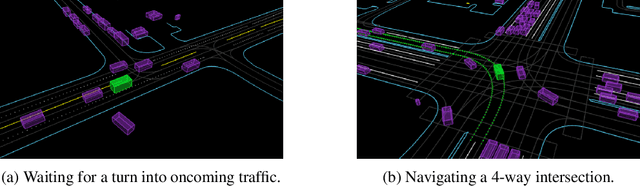
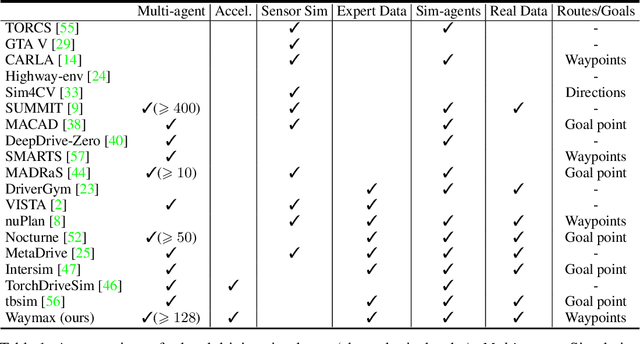
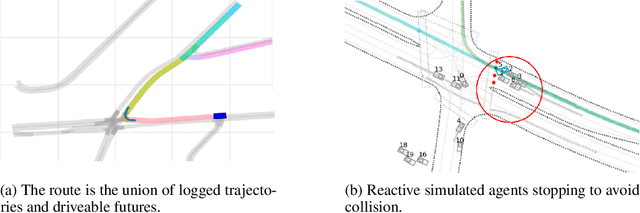
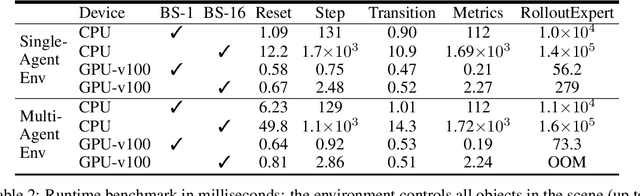
Simulation is an essential tool to develop and benchmark autonomous vehicle planning software in a safe and cost-effective manner. However, realistic simulation requires accurate modeling of nuanced and complex multi-agent interactive behaviors. To address these challenges, we introduce Waymax, a new data-driven simulator for autonomous driving in multi-agent scenes, designed for large-scale simulation and testing. Waymax uses publicly-released, real-world driving data (e.g., the Waymo Open Motion Dataset) to initialize or play back a diverse set of multi-agent simulated scenarios. It runs entirely on hardware accelerators such as TPUs/GPUs and supports in-graph simulation for training, making it suitable for modern large-scale, distributed machine learning workflows. To support online training and evaluation, Waymax includes several learned and hard-coded behavior models that allow for realistic interaction within simulation. To supplement Waymax, we benchmark a suite of popular imitation and reinforcement learning algorithms with ablation studies on different design decisions, where we highlight the effectiveness of routes as guidance for planning agents and the ability of RL to overfit against simulated agents.
Imitation Is Not Enough: Robustifying Imitation with Reinforcement Learning for Challenging Driving Scenarios
Dec 21, 2022



Imitation learning (IL) is a simple and powerful way to use high-quality human driving data, which can be collected at scale, to identify driving preferences and produce human-like behavior. However, policies based on imitation learning alone often fail to sufficiently account for safety and reliability concerns. In this paper, we show how imitation learning combined with reinforcement learning using simple rewards can substantially improve the safety and reliability of driving policies over those learned from imitation alone. In particular, we use a combination of imitation and reinforcement learning to train a policy on over 100k miles of urban driving data, and measure its effectiveness in test scenarios grouped by different levels of collision risk. To our knowledge, this is the first application of a combined imitation and reinforcement learning approach in autonomous driving that utilizes large amounts of real-world human driving data.
Hierarchical Model-Based Imitation Learning for Planning in Autonomous Driving
Oct 18, 2022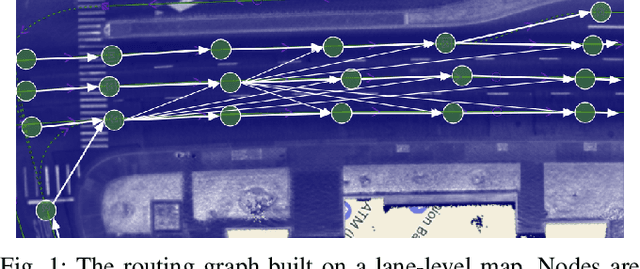
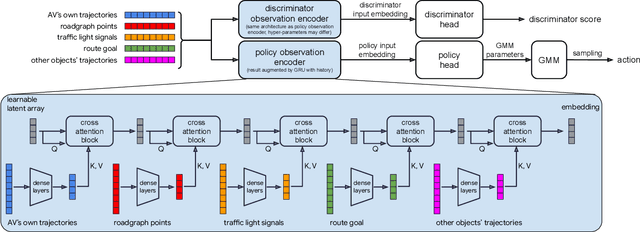
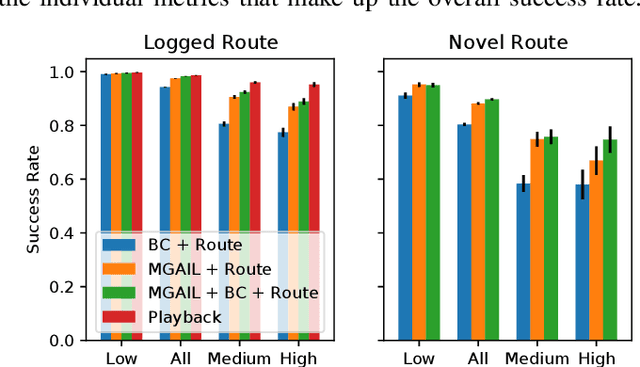
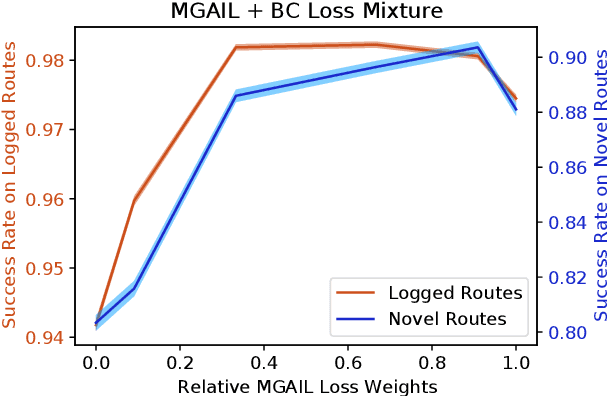
We demonstrate the first large-scale application of model-based generative adversarial imitation learning (MGAIL) to the task of dense urban self-driving. We augment standard MGAIL using a hierarchical model to enable generalization to arbitrary goal routes, and measure performance using a closed-loop evaluation framework with simulated interactive agents. We train policies from expert trajectories collected from real vehicles driving over 100,000 miles in San Francisco, and demonstrate a steerable policy that can navigate robustly even in a zero-shot setting, generalizing to synthetic scenarios with novel goals that never occurred in real-world driving. We also demonstrate the importance of mixing closed-loop MGAIL losses with open-loop behavior cloning losses, and show our best policy approaches the performance of the expert. We evaluate our imitative model in both average and challenging scenarios, and show how it can serve as a useful prior to plan successful trajectories.
Context-Aware Language Modeling for Goal-Oriented Dialogue Systems
Apr 22, 2022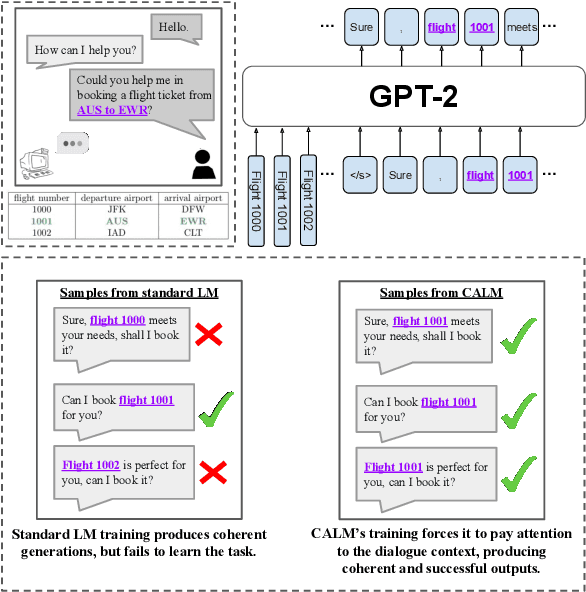
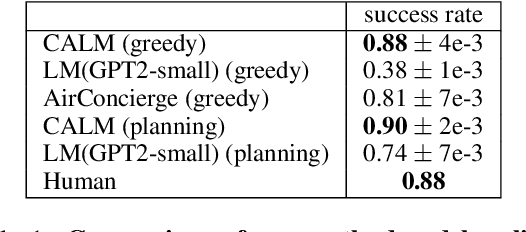


Goal-oriented dialogue systems face a trade-off between fluent language generation and task-specific control. While supervised learning with large language models is capable of producing realistic text, how to steer such responses towards completing a specific task without sacrificing language quality remains an open question. In this work, we formulate goal-oriented dialogue as a partially observed Markov decision process, interpreting the language model as a representation of both the dynamics and the policy. This view allows us to extend techniques from learning-based control, such as task relabeling, to derive a simple and effective method to finetune language models in a goal-aware way, leading to significantly improved task performance. We additionally introduce a number of training strategies that serve to better focus the model on the task at hand. We evaluate our method, Context-Aware Language Models (CALM), on a practical flight-booking task using AirDialogue. Empirically, CALM outperforms the state-of-the-art method by 7% in terms of task success, matching human-level task performance.
CHAI: A CHatbot AI for Task-Oriented Dialogue with Offline Reinforcement Learning
Apr 18, 2022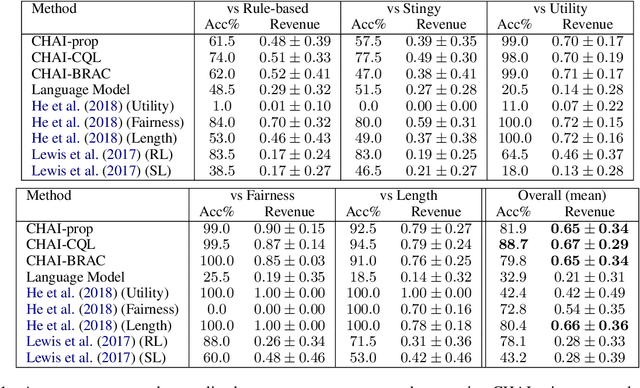
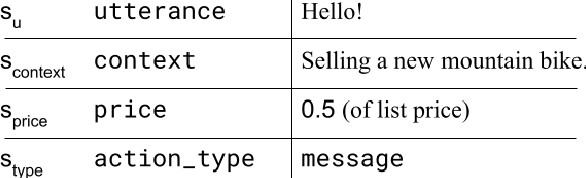

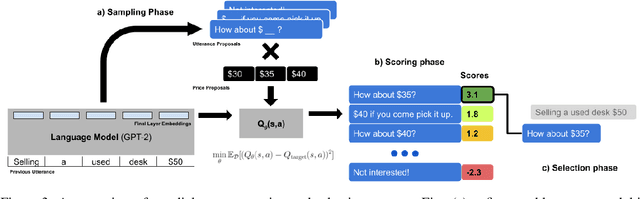
Conventionally, generation of natural language for dialogue agents may be viewed as a statistical learning problem: determine the patterns in human-provided data and generate appropriate responses with similar statistical properties. However, dialogue can also be regarded as a goal directed process, where speakers attempt to accomplish a specific task. Reinforcement learning (RL) algorithms are designed specifically for solving such goal-directed problems, but the most direct way to apply RL -- through trial-and-error learning in human conversations, -- is costly. In this paper, we study how offline reinforcement learning can instead be used to train dialogue agents entirely using static datasets collected from human speakers. Our experiments show that recently developed offline RL methods can be combined with language models to yield realistic dialogue agents that better accomplish task goals.
Benchmarks for Deep Off-Policy Evaluation
Mar 30, 2021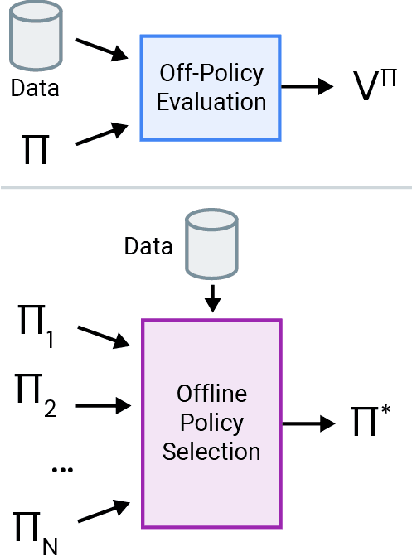
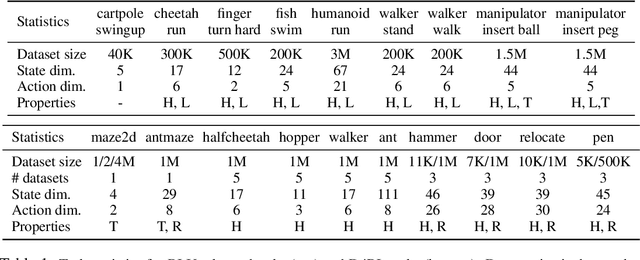
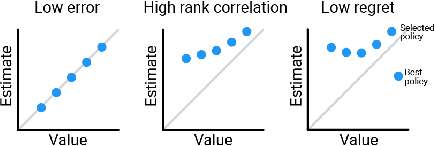
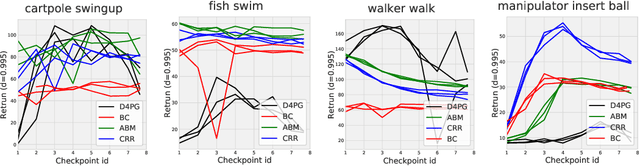
Off-policy evaluation (OPE) holds the promise of being able to leverage large, offline datasets for both evaluating and selecting complex policies for decision making. The ability to learn offline is particularly important in many real-world domains, such as in healthcare, recommender systems, or robotics, where online data collection is an expensive and potentially dangerous process. Being able to accurately evaluate and select high-performing policies without requiring online interaction could yield significant benefits in safety, time, and cost for these applications. While many OPE methods have been proposed in recent years, comparing results between papers is difficult because currently there is a lack of a comprehensive and unified benchmark, and measuring algorithmic progress has been challenging due to the lack of difficult evaluation tasks. In order to address this gap, we present a collection of policies that in conjunction with existing offline datasets can be used for benchmarking off-policy evaluation. Our tasks include a range of challenging high-dimensional continuous control problems, with wide selections of datasets and policies for performing policy selection. The goal of our benchmark is to provide a standardized measure of progress that is motivated from a set of principles designed to challenge and test the limits of existing OPE methods. We perform an evaluation of state-of-the-art algorithms and provide open-source access to our data and code to foster future research in this area.
Offline Model-Based Optimization via Normalized Maximum Likelihood Estimation
Feb 16, 2021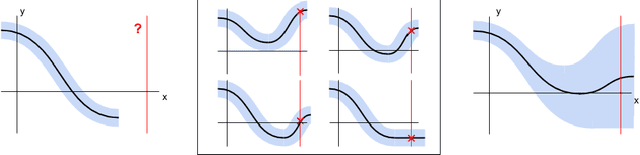
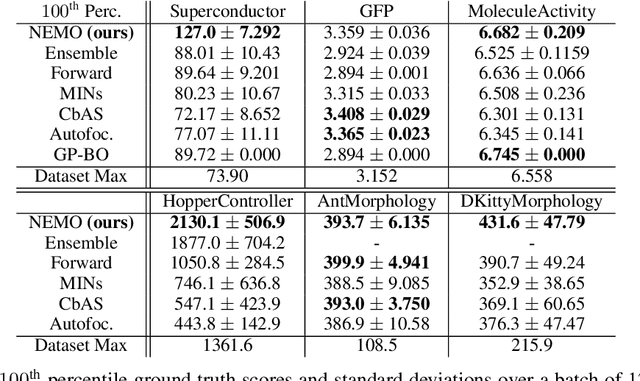
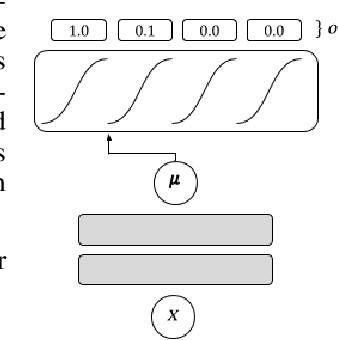
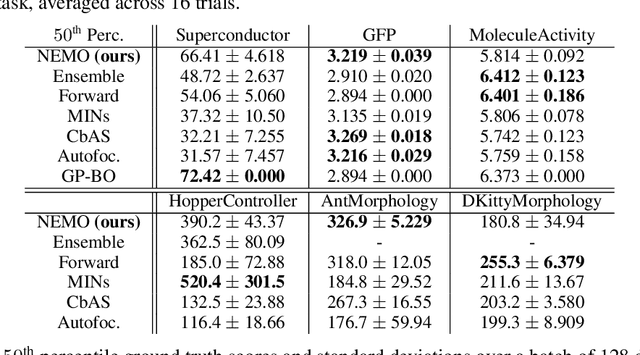
In this work we consider data-driven optimization problems where one must maximize a function given only queries at a fixed set of points. This problem setting emerges in many domains where function evaluation is a complex and expensive process, such as in the design of materials, vehicles, or neural network architectures. Because the available data typically only covers a small manifold of the possible space of inputs, a principal challenge is to be able to construct algorithms that can reason about uncertainty and out-of-distribution values, since a naive optimizer can easily exploit an estimated model to return adversarial inputs. We propose to tackle this problem by leveraging the normalized maximum-likelihood (NML) estimator, which provides a principled approach to handling uncertainty and out-of-distribution inputs. While in the standard formulation NML is intractable, we propose a tractable approximation that allows us to scale our method to high-capacity neural network models. We demonstrate that our method can effectively optimize high-dimensional design problems in a variety of disciplines such as chemistry, biology, and materials engineering.
Offline Reinforcement Learning: Tutorial, Review, and Perspectives on Open Problems
May 04, 2020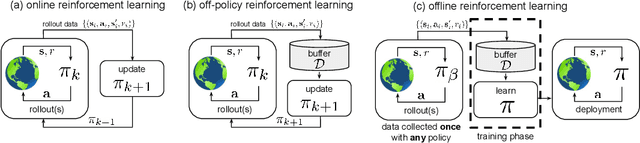
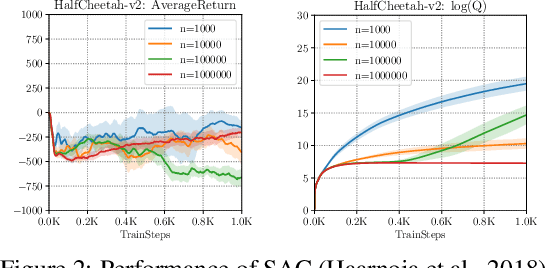
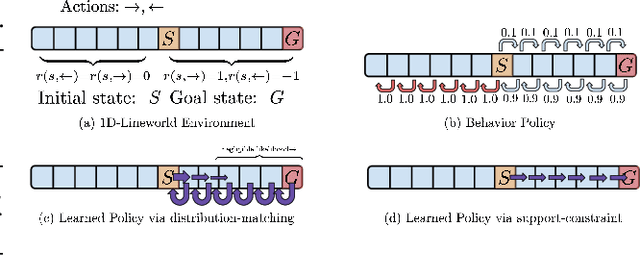
In this tutorial article, we aim to provide the reader with the conceptual tools needed to get started on research on offline reinforcement learning algorithms: reinforcement learning algorithms that utilize previously collected data, without additional online data collection. Offline reinforcement learning algorithms hold tremendous promise for making it possible to turn large datasets into powerful decision making engines. Effective offline reinforcement learning methods would be able to extract policies with the maximum possible utility out of the available data, thereby allowing automation of a wide range of decision-making domains, from healthcare and education to robotics. However, the limitations of current algorithms make this difficult. We will aim to provide the reader with an understanding of these challenges, particularly in the context of modern deep reinforcement learning methods, and describe some potential solutions that have been explored in recent work to mitigate these challenges, along with recent applications, and a discussion of perspectives on open problems in the field.
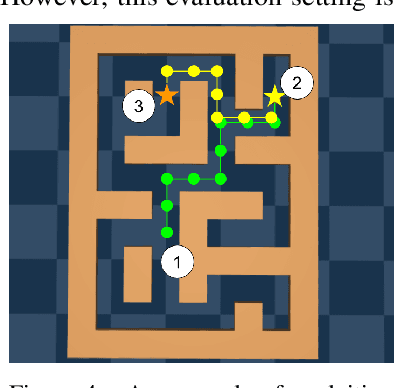
D4RL: Datasets for Deep Data-Driven Reinforcement Learning
Apr 20, 2020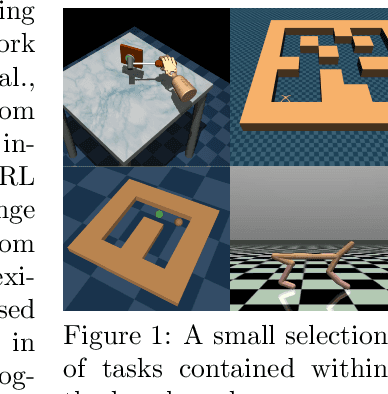
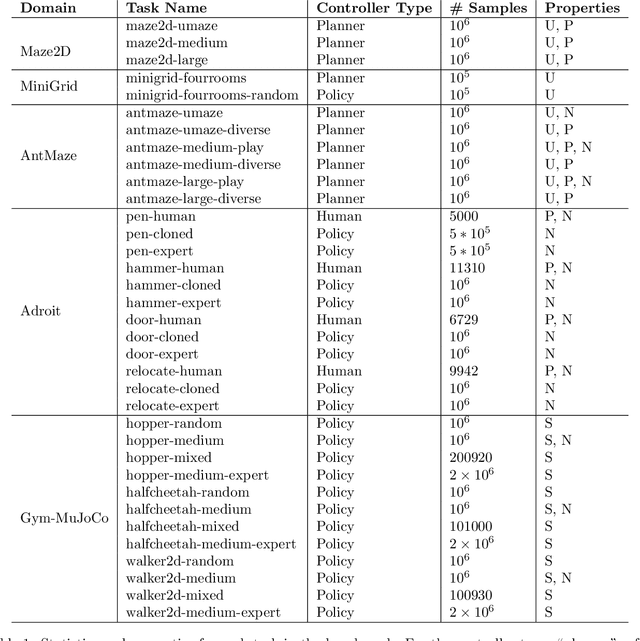

The offline reinforcement learning (RL) problem, also referred to as batch RL, refers to the setting where a policy must be learned from a dataset of previously collected data, without additional online data collection. In supervised learning, large datasets and complex deep neural networks have fueled impressive progress, but in contrast, conventional RL algorithms must collect large amounts of on-policy data and have had little success leveraging previously collected datasets. As a result, existing RL benchmarks are not well-suited for the offline setting, making progress in this area difficult to measure. To design a benchmark tailored to offline RL, we start by outlining key properties of datasets relevant to applications of offline RL. Based on these properties, we design a set of benchmark tasks and datasets that evaluate offline RL algorithms under these conditions. Examples of such properties include: datasets generated via hand-designed controllers and human demonstrators, multi-objective datasets, where an agent can perform different tasks in the same environment, and datasets consisting of a heterogeneous mix of high-quality and low-quality trajectories. By designing the benchmark tasks and datasets to reflect properties of real-world offline RL problems, our benchmark will focus research effort on methods that drive substantial improvements not just on simulated benchmarks, but ultimately on the kinds of real-world problems where offline RL will have the largest impact.