 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Laws of Motion Forecasting and Planning -- A Technical Report
Jun 09, 2025We study the empirical scaling laws of a family of encoder-decoder autoregressive transformer models on the task of joint motion forecasting and planning in the autonomous driving domain. Using a 500 thousand hours driving dataset, we demonstrate that, similar to language modeling, model performance improves as a power-law function of the total compute budget, and we observe a strong correlation between model training loss and model evaluation metrics. Most interestingly, closed-loop metrics also improve with scaling, which has important implications for the suitability of open-loop metrics for model development and hill climbing. We also study the optimal scaling of the number of transformer parameters and the training data size for a training compute-optimal model. We find that as the training compute budget grows, optimal scaling requires increasing the model size 1.5x as fast as the dataset size. We also study inference-time compute scaling, where we observe that sampling and clustering the output of smaller models makes them competitive with larger models, up to a crossover point beyond which a larger models becomes more inference-compute efficient. Overall, our experimental results demonstrate that optimizing the training and inference-time scaling properties of motion forecasting and planning models is a key lever for improving their performance to address a wide variety of driving scenarios. Finally, we briefly study the utility of training on general logged driving data of other agents to improve the performance of the ego-agent, an important research area to address the scarcity of robotics data for large capacity models training.
Improving Agent Behaviors with RL Fine-tuning for Autonomous Driving
Sep 26, 2024



A major challenge in autonomous vehicle research is modeling agent behaviors, which has critical applications including constructing realistic and reliable simulations for off-board evaluation and forecasting traffic agents motion for onboard planning. While supervised learning has shown success in modeling agents across various domains, these models can suffer from distribution shift when deployed at test-time. In this work, we improve the reliability of agent behaviors by closed-loop fine-tuning of behavior models with reinforcement learning. Our method demonstrates improved overall performance, as well as improved targeted metrics such as collision rate, on the Waymo Open Sim Agents challenge. Additionally, we present a novel policy evaluation benchmark to directly assess the ability of simulated agents to measure the quality of autonomous vehicle planners and demonstrate the effectiveness of our approach on this new benchmark.
Waymax: An Accelerated, Data-Driven Simulator for Large-Scale Autonomous Driving Research
Oct 12, 2023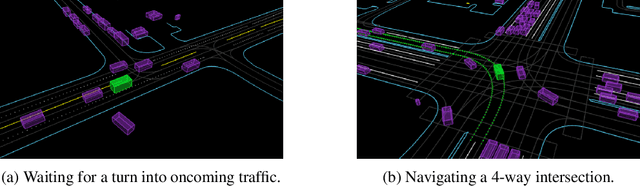
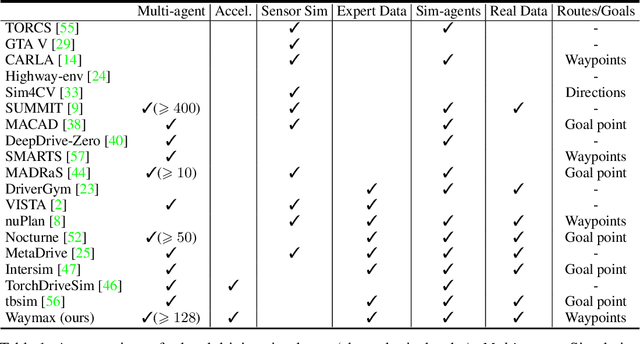
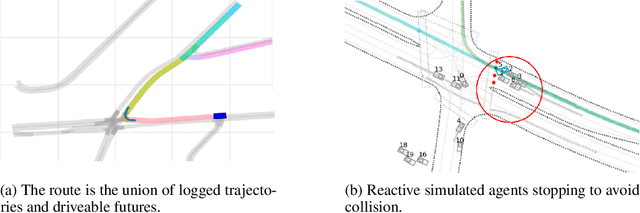
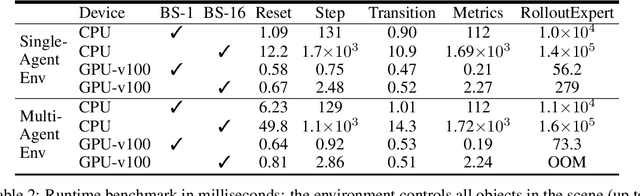
Simulation is an essential tool to develop and benchmark autonomous vehicle planning software in a safe and cost-effective manner. However, realistic simulation requires accurate modeling of nuanced and complex multi-agent interactive behaviors. To address these challenges, we introduce Waymax, a new data-driven simulator for autonomous driving in multi-agent scenes, designed for large-scale simulation and testing. Waymax uses publicly-released, real-world driving data (e.g., the Waymo Open Motion Dataset) to initialize or play back a diverse set of multi-agent simulated scenarios. It runs entirely on hardware accelerators such as TPUs/GPUs and supports in-graph simulation for training, making it suitable for modern large-scale, distributed machine learning workflows. To support online training and evaluation, Waymax includes several learned and hard-coded behavior models that allow for realistic interaction within simulation. To supplement Waymax, we benchmark a suite of popular imitation and reinforcement learning algorithms with ablation studies on different design decisions, where we highlight the effectiveness of routes as guidance for planning agents and the ability of RL to overfit against simulated agents.
The Waymo Open Sim Agents Challenge
May 19, 2023In this work, we define the Waymo Open Sim Agents Challenge (WOSAC). Simulation with realistic, interactive agents represents a key task for autonomous vehicle software development. WOSAC is the first public challenge to tackle this task and propose corresponding metrics. The goal of the challenge is to stimulate the design of realistic simulators that can be used to evaluate and train a behavior model for autonomous driving. We outline our evaluation methodology and present preliminary results for a number of different baseline simulation agent methods.
Imitative Planning using Conditional Normalizing Flow
Aug 26, 2020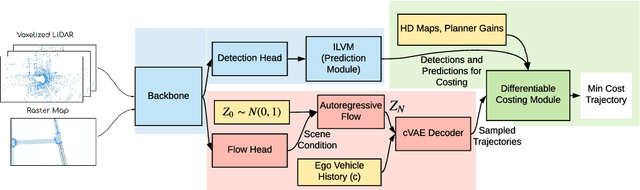

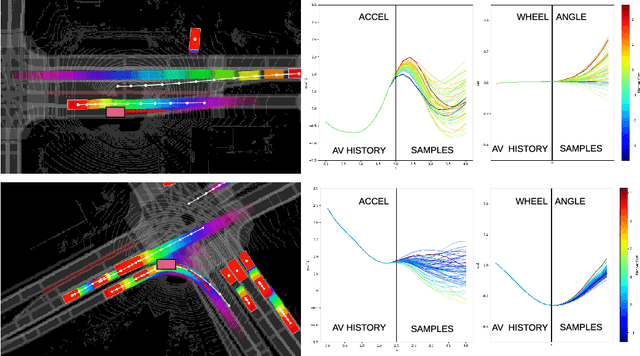
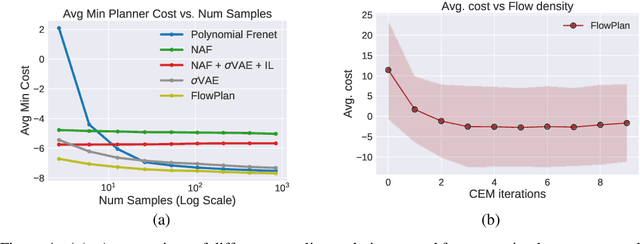
We explore the application of normalizing flows for improving the performance of trajectory planning for autonomous vehicles (AVs). Normalizing flows provide an invertible mapping from a known prior distribution to a potentially complex, multi-modal target distribution and allow for fast sampling with exact PDF inference. By modeling a trajectory planner's cost manifold as an energy function we learn a scene conditioned mapping from the prior to a Boltzmann distribution over the AV control space. This mapping allows for control samples and their associated energy to be generated jointly and in parallel. We propose using neural autoregressive flow (NAF) as part of an end-to-end deep learned system that allows for utilizing sensors, map, and route information to condition the flow mapping. Finally, we demonstrate the effectiveness of our approach on real world datasets over IL and hand constructed trajectory sampling techniques.
Implicit Latent Variable Model for Scene-Consistent Motion Forecasting
Jul 23, 2020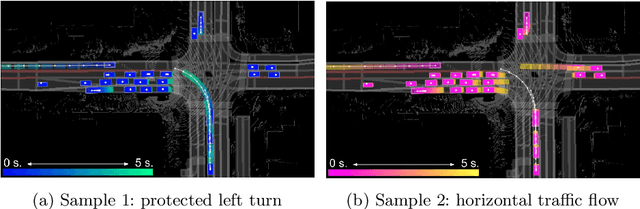
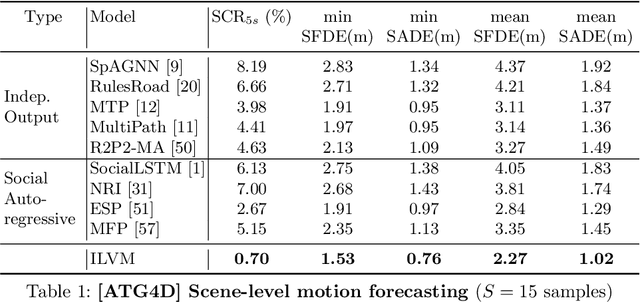

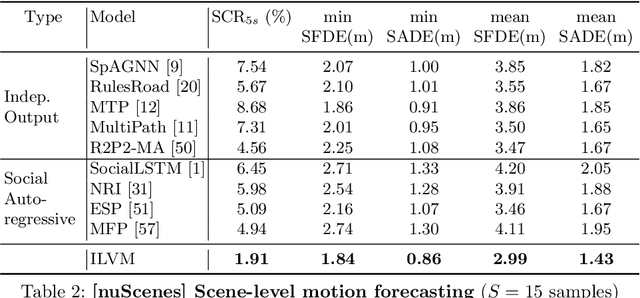
In order to plan a safe maneuver an autonomous vehicle must accurately perceive its environment, and understand the interactions among traffic participants. In this paper, we aim to learn scene-consistent motion forecasts of complex urban traffic directly from sensor data. In particular, we propose to characterize the joint distribution over future trajectories via an implicit latent variable model. We model the scene as an interaction graph and employ powerful graph neural networks to learn a distributed latent representation of the scene. Coupled with a deterministic decoder, we obtain trajectory samples that are consistent across traffic participants, achieving state-of-the-art results in motion forecasting and interaction understanding. Last but not least, we demonstrate that our motion forecasts result in safer and more comfortable motion planning.
The Importance of Prior Knowledge in Precise Multimodal Prediction
Jun 04, 2020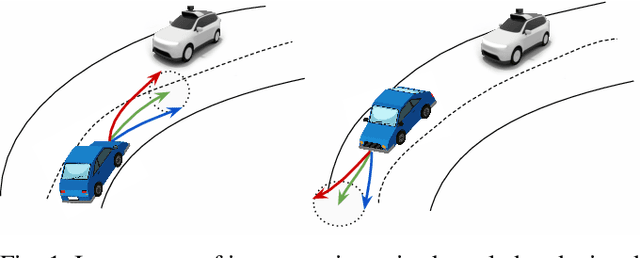
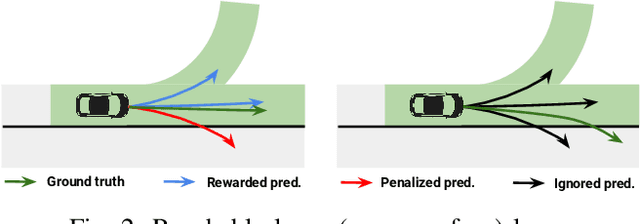
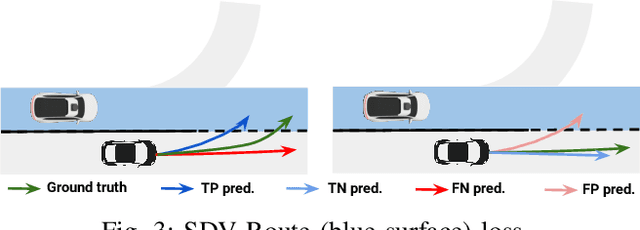
Roads have well defined geometries, topologies, and traffic rules. While this has been widely exploited in motion planning methods to produce maneuvers that obey the law, little work has been devoted to utilize these priors in perception and motion forecasting methods. In this paper we propose to incorporate these structured priors as a loss function. In contrast to imposing hard constraints, this approach allows the model to handle non-compliant maneuvers when those happen in the real world. Safe motion planning is the end goal, and thus a probabilistic characterization of the possible future developments of the scene is key to choose the plan with the lowest expected cost. Towards this goal, we design a framework that leverages REINFORCE to incorporate non-differentiable priors over sample trajectories from a probabilistic model, thus optimizing the whole distribution. We demonstrate the effectiveness of our approach on real-world self-driving datasets containing complex road topologies and multi-agent interactions. Our motion forecasts not only exhibit better precision and map understanding, but most importantly result in safer motion plans taken by our self-driving vehicle. We emphasize that despite the importance of this evaluation, it has been often overlooked by previous perception and motion forecasting works.
Spatially-Aware Graph Neural Networks for Relational Behavior Forecasting from Sensor Data
Oct 18, 2019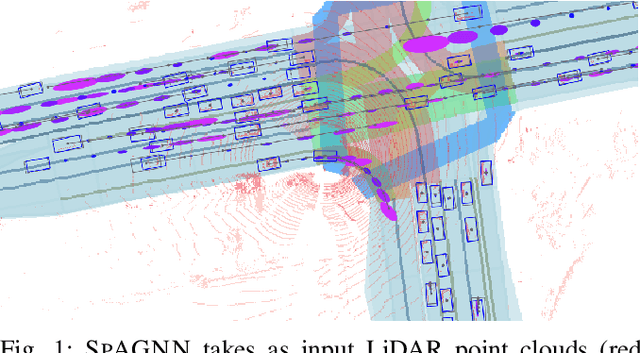

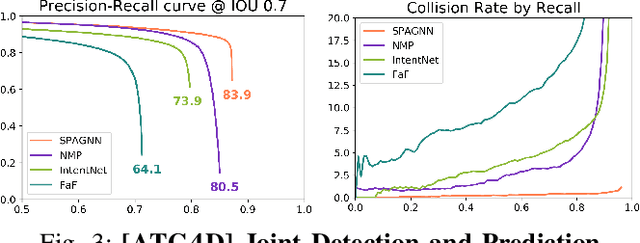

In this paper, we tackle the problem of relational behavior forecasting from sensor data. Towards this goal, we propose a novel spatially-aware graph neural network (SpAGNN) that models the interactions between agents in the scene. Specifically, we exploit a convolutional neural network to detect the actors and compute their initial states. A graph neural network then iteratively updates the actor states via a message passing process. Inspired by Gaussian belief propagation, we design the messages to be spatially-transformed parameters of the output distributions from neighboring agents. Our model is fully differentiable, thus enabling end-to-end training. Importantly, our probabilistic predictions can model uncertainty at the trajectory level. We demonstrate the effectiveness of our approach by achieving significant improvements over the state-of-the-art on two real-world self-driving datasets: ATG4D and nuScenes.
Generalizing Informed Sampling for Asymptotically Optimal Sampling-based Kinodynamic Planning via Markov Chain Monte Carlo
Oct 17, 2017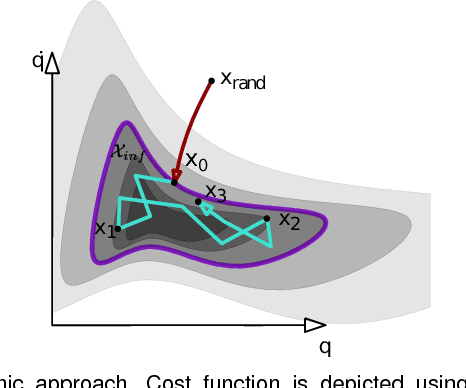
Asymptotically-optimal motion planners such as RRT* have been shown to incrementally approximate the shortest path between start and goal states. Once an initial solution is found, their performance can be dramatically improved by restricting subsequent samples to regions of the state space that can potentially improve the current solution. When the motion planning problem lies in a Euclidean space, this region $X_{inf}$, called the informed set, can be sampled directly. However, when planning with differential constraints in non-Euclidean state spaces, no analytic solutions exists to sampling $X_{inf}$ directly. State-of-the-art approaches to sampling $X_{inf}$ in such domains such as Hierarchical Rejection Sampling (HRS) may still be slow in high-dimensional state space. This may cause the planning algorithm to spend most of its time trying to produces samples in $X_{inf}$ rather than explore it. In this paper, we suggest an alternative approach to produce samples in the informed set $X_{inf}$ for a wide range of settings. Our main insight is to recast this problem as one of sampling uniformly within the sub-level-set of an implicit non-convex function. This recasting enables us to apply Monte Carlo sampling methods, used very effectively in the Machine Learning and Optimization communities, to solve our problem. We show for a wide range of scenarios that using our sampler can accelerate the convergence rate to high-quality solutions in high-dimensional problems.