 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitative Planning using Conditional Normalizing Flow
Aug 26, 2020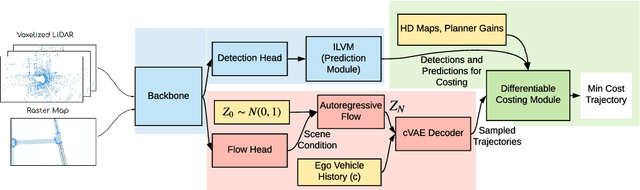

We explore the application of normalizing flows for improving the performance of trajectory planning for autonomous vehicles (AVs). Normalizing flows provide an invertible mapping from a known prior distribution to a potentially complex, multi-modal target distribution and allow for fast sampling with exact PDF inference. By modeling a trajectory planner's cost manifold as an energy function we learn a scene conditioned mapping from the prior to a Boltzmann distribution over the AV control space. This mapping allows for control samples and their associated energy to be generated jointly and in parallel. We propose using neural autoregressive flow (NAF) as part of an end-to-end deep learned system that allows for utilizing sensors, map, and route information to condition the flow mapping. Finally, we demonstrate the effectiveness of our approach on real world datasets over IL and hand constructed trajectory sampling techniques.