 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoRA: Missing Modality Low-Rank Adaptation for Visual Recognition
Nov 09, 2025Pre-trained vision language models have shown remarkable performance on visual recognition tasks, but they typically assume the availability of complete multimodal inputs during both training and inference. In real-world scenarios, however, modalities may be missing due to privacy constraints, collection difficulties, or resource limitations. While previous approaches have addressed this challenge using prompt learning techniques, they fail to capture the cross-modal relationships necessary for effective multimodal visual recognition and suffer from inevitable computational overhead. In this paper, we introduce MoRA, a parameter-efficient fine-tuning method that explicitly models cross-modal interactions while maintaining modality-specific adaptations. MoRA introduces modality-common parameters between text and vision encoders, enabling bidirectional knowledge transfer. Additionally, combined with the modality-specific parameters, MoRA allows the backbone model to maintain inter-modality interaction and enable intra-modality flexibility. Extensive experiments on standard benchmarks demonstrate that MoRA achieves an average performance improvement in missing-modality scenarios by 5.24% and uses only 25.90% of the inference time compared to the SOTA method while requiring only 0.11% of trainable parameters compared to full fine-tuning.
Windsock is Dancing: Adaptive Multimodal Retrieval-Augmented Generation
Oct 26, 2025Multimodal Retrieval-Augmented Generation (MRAG) has emerged as a promising method to generate factual and up-to-date responses of Multimodal Large Language Models (MLLMs) by incorporating non-parametric knowledge from external knowledge bases. However, existing MRAG approaches suffer from static retrieval strategies, inflexible modality selection, and suboptimal utilization of retrieved information, leading to three critical challenges: determining when to retrieve, what modality to incorporate, and how to utilize retrieved information effectively. To address these challenges, we introduce Windsock, a query-dependent module making decisions on retrieval necessity and modality selection, effectively reducing computational overhead and improving response quality. Additionally, we propose Dynamic Noise-Resistance (DANCE) Instruction Tuning, an adaptive training strategy that enhances MLLMs' ability to utilize retrieved information while maintaining robustness against noise. Moreover, we adopt a self-assessment approach leveraging knowledge within MLLMs to convert question-answering datasets to MRAG training datasets. Extensive experiments demonstrate that our proposed method significantly improves the generation quality by 17.07% while reducing 8.95% retrieval times.
Improving Agent Behaviors with RL Fine-tuning for Autonomous Driving
Sep 26, 2024



A major challenge in autonomous vehicle research is modeling agent behaviors, which has critical applications including constructing realistic and reliable simulations for off-board evaluation and forecasting traffic agents motion for onboard planning. While supervised learning has shown success in modeling agents across various domains, these models can suffer from distribution shift when deployed at test-time. In this work, we improve the reliability of agent behaviors by closed-loop fine-tuning of behavior models with reinforcement learning. Our method demonstrates improved overall performance, as well as improved targeted metrics such as collision rate, on the Waymo Open Sim Agents challenge. Additionally, we present a novel policy evaluation benchmark to directly assess the ability of simulated agents to measure the quality of autonomous vehicle planners and demonstrate the effectiveness of our approach on this new benchmark.
STAR: Sparse Transformer-based Action Recognition
Jul 15, 2021
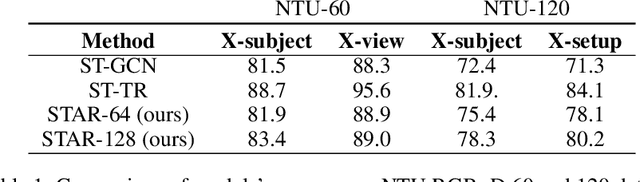

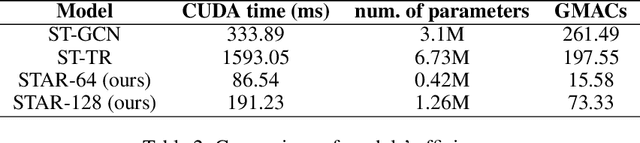
The cognitive system for human action and behavior has evolved into a deep learning regime, and especially the advent of Graph Convolution Networks has transformed the field in recent years. However, previous works have mainly focused on over-parameterized and complex models based on dense graph convolution networks, resulting in low efficiency in training and inference. Meanwhile, the Transformer architecture-based model has not yet been well explored for cognitive application in human action and behavior estimation. This work proposes a novel skeleton-based human action recognition model with sparse attention on the spatial dimension and segmented linear attention on the temporal dimension of data. Our model can also process the variable length of video clips grouped as a single batch. Experiments show that our model can achieve comparable performance while utilizing much less trainable parameters and achieve high speed in training and inference. Experiments show that our model achieves 4~18x speedup and 1/7~1/15 model size compared with the baseline models at competitive accuracy.