 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Generating Robot Constitutions & Benchmarks for Semantic Safety
Mar 11, 2025Until recently, robotics safety research was predominantly about collision avoidance and hazard reduction in the immediate vicinity of a robot. Since the advent of large vision and language models (VLMs), robots are now also capable of higher-level semantic scene understanding and natural language interactions with humans. Despite their known vulnerabilities (e.g. hallucinations or jail-breaking), VLMs are being handed control of robots capable of physical contact with the real world. This can lead to dangerous behaviors, making semantic safety for robots a matter of immediate concern. Our contributions in this paper are two fold: first, to address these emerging risks, we release the ASIMOV Benchmark, a large-scale and comprehensive collection of datasets for evaluating and improving semantic safety of foundation models serving as robot brains. Our data generation recipe is highly scalable: by leveraging text and image generation techniques, we generate undesirable situations from real-world visual scenes and human injury reports from hospitals. Secondly, we develop a framework to automatically generate robot constitutions from real-world data to steer a robot's behavior using Constitutional AI mechanisms. We propose a novel auto-amending process that is able to introduce nuances in written rules of behavior; this can lead to increased alignment with human preferences on behavior desirability and safety. We explore trade-offs between generality and specificity across a diverse set of constitutions of different lengths, and demonstrate that a robot is able to effectively reject unconstitutional actions. We measure a top alignment rate of 84.3% on the ASIMOV Benchmark using generated constitutions, outperforming no-constitution baselines and human-written constitutions. Data is available at asimov-benchmark.github.io
Predictive Red Teaming: Breaking Policies Without Breaking Robots
Feb 10, 2025Visuomotor policies trained via imitation learning are capable of performing challenging manipulation tasks, but are often extremely brittle to lighting, visual distractors, and object locations. These vulnerabilities can depend unpredictably on the specifics of training, and are challenging to expose without time-consuming and expensive hardware evaluations. We propose the problem of predictive red teaming: discovering vulnerabilities of a policy with respect to environmental factors, and predicting the corresponding performance degradation without hardware evaluations in off-nominal scenarios. In order to achieve this, we develop RoboART: an automated red teaming (ART) pipeline that (1) modifies nominal observations using generative image editing to vary different environmental factors, and (2) predicts performance under each variation using a policy-specific anomaly detector executed on edited observations. Experiments across 500+ hardware trials in twelve off-nominal conditions for visuomotor diffusion policies demonstrate that RoboART predicts performance degradation with high accuracy (less than 0.19 average difference between predicted and real success rates). We also demonstrate how predictive red teaming enables targeted data collection: fine-tuning with data collected under conditions predicted to be adverse boosts baseline performance by 2-7x.
A Short Note on Evaluating RepNet for Temporal Repetition Counting in Videos
Nov 13, 2024


We discuss some consistent issues on how RepNet has been evaluated in various papers. As a way to mitigate these issues, we report RepNet performance results on different datasets, and release evaluation code and the RepNet checkpoint to obtain these results. Code URL: https://github.com/google-research/google-research/blob/master/repnet/
Vid2Robot: End-to-end Video-conditioned Policy Learning with Cross-Attention Transformers
Mar 19, 2024



While large-scale robotic systems typically rely on textual instructions for tasks, this work explores a different approach: can robots infer the task directly from observing humans? This shift necessitates the robot's ability to decode human intent and translate it into executable actions within its physical constraints and environment. We introduce Vid2Robot, a novel end-to-end video-based learning framework for robots. Given a video demonstration of a manipulation task and current visual observations, Vid2Robot directly produces robot actions. This is achieved through a unified representation model trained on a large dataset of human video and robot trajectory. The model leverages cross-attention mechanisms to fuse prompt video features to the robot's current state and generate appropriate actions that mimic the observed task. To further improve policy performance, we propose auxiliary contrastive losses that enhance the alignment between human and robot video representations. We evaluate Vid2Robot on real-world robots, demonstrating a 20% improvement in performance compared to other video-conditioned policies when using human demonstration videos. Additionally, our model exhibits emergent capabilities, such as successfully transferring observed motions from one object to another, and long-horizon composition, thus showcasing its potential for real-world applications. Project website: vid2robot.github.io
RT-H: Action Hierarchies Using Language
Mar 04, 2024



Language provides a way to break down complex concepts into digestible pieces. Recent works in robot imitation learning use language-conditioned policies that predict actions given visual observations and the high-level task specified in language. These methods leverage the structure of natural language to share data between semantically similar tasks (e.g., "pick coke can" and "pick an apple") in multi-task datasets. However, as tasks become more semantically diverse (e.g., "pick coke can" and "pour cup"), sharing data between tasks becomes harder, so learning to map high-level tasks to actions requires much more demonstration data. To bridge tasks and actions, our insight is to teach the robot the language of actions, describing low-level motions with more fine-grained phrases like "move arm forward". Predicting these language motions as an intermediate step between tasks and actions forces the policy to learn the shared structure of low-level motions across seemingly disparate tasks. Furthermore, a policy that is conditioned on language motions can easily be corrected during execution through human-specified language motions. This enables a new paradigm for flexible policies that can learn from human intervention in language. Our method RT-H builds an action hierarchy using language motions: it first learns to predict language motions, and conditioned on this and the high-level task, it predicts actions, using visual context at all stages. We show that RT-H leverages this language-action hierarchy to learn policies that are more robust and flexible by effectively tapping into multi-task datasets. We show that these policies not only allow for responding to language interventions, but can also learn from such interventions and outperform methods that learn from teleoperated interventions. Our website and videos are found at https://rt-hierarchy.github.io.
AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents
Jan 23, 2024Foundation models that incorporate language, vision, and more recently actions have revolutionized the ability to harness internet scale data to reason about useful tasks. However, one of the key challenges of training embodied foundation models is the lack of data grounded in the physical world. In this paper, we propose AutoRT, a system that leverages existing foundation models to scale up the deployment of operational robots in completely unseen scenarios with minimal human supervision. AutoRT leverages vision-language models (VLMs) for scene understanding and grounding, and further uses large language models (LLMs) for proposing diverse and novel instructions to be performed by a fleet of robots. Guiding data collection by tapping into the knowledge of foundation models enables AutoRT to effectively reason about autonomy tradeoffs and safety while significantly scaling up data collection for robot learning. We demonstrate AutoRT proposing instructions to over 20 robots across multiple buildings and collecting 77k real robot episodes via both teleoperation and autonomous robot policies. We experimentally show that such "in-the-wild" data collected by AutoRT is significantly more diverse, and that AutoRT's use of LLMs allows for instruction following data collection robots that can align to human preferences.
RoboVQA: Multimodal Long-Horizon Reasoning for Robotics
Nov 01, 2023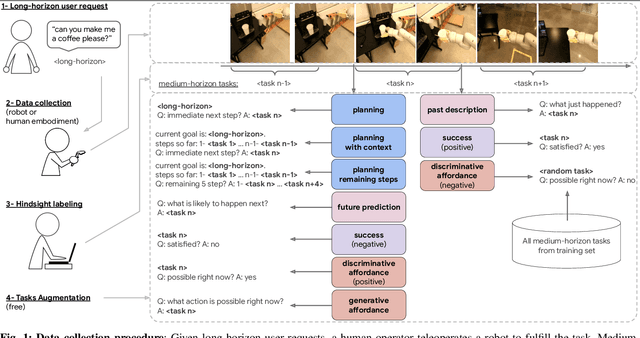

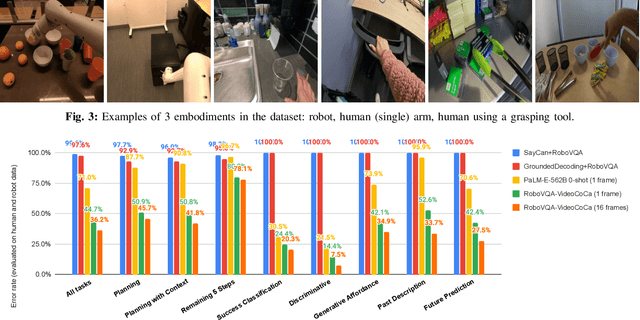
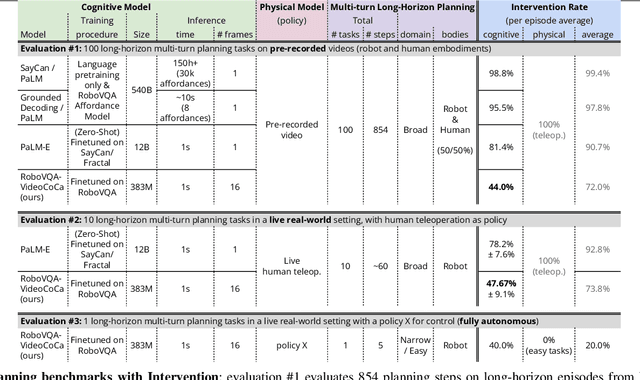
We present a scalable, bottom-up and intrinsically diverse data collection scheme that can be used for high-level reasoning with long and medium horizons and that has 2.2x higher throughput compared to traditional narrow top-down step-by-step collection. We collect realistic data by performing any user requests within the entirety of 3 office buildings and using multiple robot and human embodiments. With this data, we show that models trained on all embodiments perform better than ones trained on the robot data only, even when evaluated solely on robot episodes. We find that for a fixed collection budget it is beneficial to take advantage of cheaper human collection along with robot collection. We release a large and highly diverse (29,520 unique instructions) dataset dubbed RoboVQA containing 829,502 (video, text) pairs for robotics-focused visual question answering. We also demonstrate how evaluating real robot experiments with an intervention mechanism enables performing tasks to completion, making it deployable with human oversight even if imperfect while also providing a single performance metric. We demonstrate a single video-conditioned model named RoboVQA-VideoCoCa trained on our dataset that is capable of performing a variety of grounded high-level reasoning tasks in broad realistic settings with a cognitive intervention rate 46% lower than the zero-shot state of the art visual language model (VLM) baseline and is able to guide real robots through long-horizon tasks. The performance gap with zero-shot state-of-the-art models indicates that a lot of grounded data remains to be collected for real-world deployment, emphasizing the critical need for scalable data collection approaches. Finally, we show that video VLMs significantly outperform single-image VLMs with an average error rate reduction of 19% across all VQA tasks. Data and videos available at https://robovqa.github.io
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Video Language Planning
Oct 16, 2023We are interested in enabling visual planning for complex long-horizon tasks in the space of generated videos and language, leveraging recent advances in large generative models pretrained on Internet-scale data. To this end, we present video language planning (VLP), an algorithm that consists of a tree search procedure, where we train (i) vision-language models to serve as both policies and value functions, and (ii) text-to-video models as dynamics models. VLP takes as input a long-horizon task instruction and current image observation, and outputs a long video plan that provides detailed multimodal (video and language) specifications that describe how to complete the final task. VLP scales with increasing computation budget where more computation time results in improved video plans, and is able to synthesize long-horizon video plans across different robotics domains: from multi-object rearrangement, to multi-camera bi-arm dexterous manipulation. Generated video plans can be translated into real robot actions via goal-conditioned policies, conditioned on each intermediate frame of the generated video. Experiments show that VLP substantially improves long-horizon task success rates compared to prior methods on both simulated and real robots (across 3 hardware platforms).