 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVADER: Visual Affordance Detection and Error Recovery for Multi Robot Human Collaboration
May 25, 2024



Robots today can exploit the rich world knowledge of large language models to chain simple behavioral skills into long-horizon tasks. However, robots often get interrupted during long-horizon tasks due to primitive skill failures and dynamic environments. We propose VADER, a plan, execute, detect framework with seeking help as a new skill that enables robots to recover and complete long-horizon tasks with the help of humans or other robots. VADER leverages visual question answering (VQA) modules to detect visual affordances and recognize execution errors. It then generates prompts for a language model planner (LMP) which decides when to seek help from another robot or human to recover from errors in long-horizon task execution. We show the effectiveness of VADER with two long-horizon robotic tasks. Our pilot study showed that VADER is capable of performing complex long-horizon tasks by asking for help from another robot to clear a table. Our user study showed that VADER is capable of performing complex long-horizon tasks by asking for help from a human to clear a path. We gathered feedback from people (N=19) about the performance of the VADER performance vs. a robot that did not ask for help. https://google-vader.github.io/
AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents
Jan 23, 2024Foundation models that incorporate language, vision, and more recently actions have revolutionized the ability to harness internet scale data to reason about useful tasks. However, one of the key challenges of training embodied foundation models is the lack of data grounded in the physical world. In this paper, we propose AutoRT, a system that leverages existing foundation models to scale up the deployment of operational robots in completely unseen scenarios with minimal human supervision. AutoRT leverages vision-language models (VLMs) for scene understanding and grounding, and further uses large language models (LLMs) for proposing diverse and novel instructions to be performed by a fleet of robots. Guiding data collection by tapping into the knowledge of foundation models enables AutoRT to effectively reason about autonomy tradeoffs and safety while significantly scaling up data collection for robot learning. We demonstrate AutoRT proposing instructions to over 20 robots across multiple buildings and collecting 77k real robot episodes via both teleoperation and autonomous robot policies. We experimentally show that such "in-the-wild" data collected by AutoRT is significantly more diverse, and that AutoRT's use of LLMs allows for instruction following data collection robots that can align to human preferences.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Robotic Table Tennis: A Case Study into a High Speed Learning System
Sep 06, 2023



We present a deep-dive into a real-world robotic learning system that, in previous work, was shown to be capable of hundreds of table tennis rallies with a human and has the ability to precisely return the ball to desired targets. This system puts together a highly optimized perception subsystem, a high-speed low-latency robot controller, a simulation paradigm that can prevent damage in the real world and also train policies for zero-shot transfer, and automated real world environment resets that enable autonomous training and evaluation on physical robots. We complement a complete system description, including numerous design decisions that are typically not widely disseminated, with a collection of studies that clarify the importance of mitigating various sources of latency, accounting for training and deployment distribution shifts, robustness of the perception system, sensitivity to policy hyper-parameters, and choice of action space. A video demonstrating the components of the system and details of experimental results can be found at https://youtu.be/uFcnWjB42I0.
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Apr 04, 2022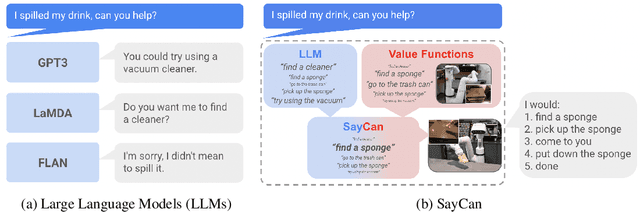
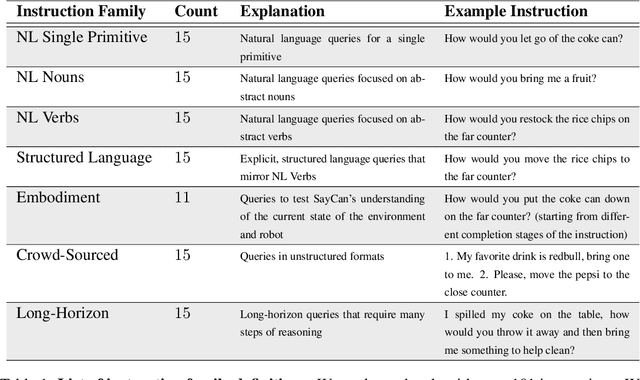
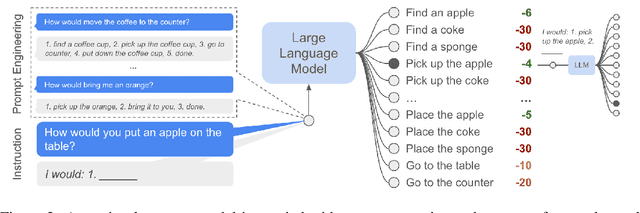
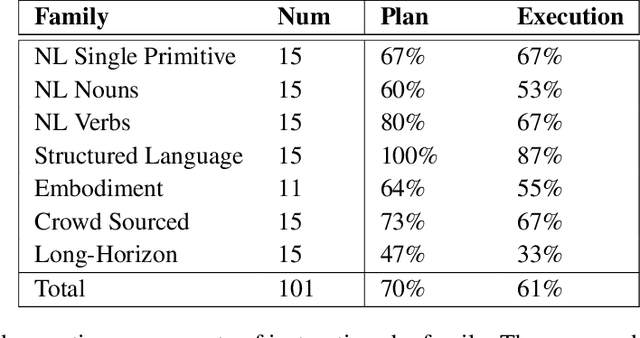
Large language models can encode a wealth of semantic knowledge about the world. Such knowledge could be extremely useful to robots aiming to act upon high-level, temporally extended instructions expressed in natural language. However, a significant weakness of language models is that they lack real-world experience, which makes it difficult to leverage them for decision making within a given embodiment. For example, asking a language model to describe how to clean a spill might result in a reasonable narrative, but it may not be applicable to a particular agent, such as a robot, that needs to perform this task in a particular environment. We propose to provide real-world grounding by means of pretrained skills, which are used to constrain the model to propose natural language actions that are both feasible and contextually appropriate. The robot can act as the language model's "hands and eyes," while the language model supplies high-level semantic knowledge about the task. We show how low-level skills can be combined with large language models so that the language model provides high-level knowledge about the procedures for performing complex and temporally-extended instructions, while value functions associated with these skills provide the grounding necessary to connect this knowledge to a particular physical environment. We evaluate our method on a number of real-world robotic tasks, where we show the need for real-world grounding and that this approach is capable of completing long-horizon, abstract, natural language instructions on a mobile manipulator. The project's website and the video can be found at https://say-can.github.io/
Emergent Real-World Robotic Skills via Unsupervised Off-Policy Reinforcement Learning
Apr 27, 2020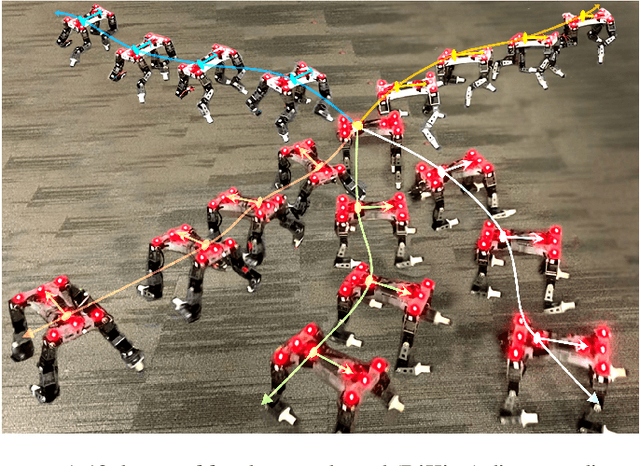
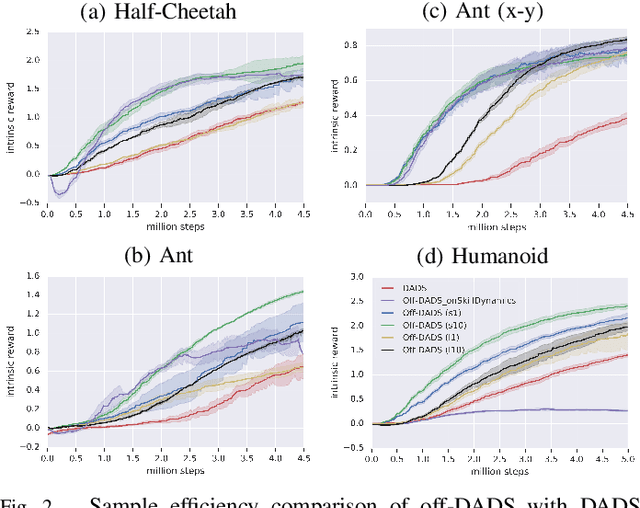
Reinforcement learning provides a general framework for learning robotic skills while minimizing engineering effort. However, most reinforcement learning algorithms assume that a well-designed reward function is provided, and learn a single behavior for that single reward function. Such reward functions can be difficult to design in practice. Can we instead develop efficient reinforcement learning methods that acquire diverse skills without any reward function, and then repurpose these skills for downstream tasks? In this paper, we demonstrate that a recently proposed unsupervised skill discovery algorithm can be extended into an efficient off-policy method, making it suitable for performing unsupervised reinforcement learning in the real world. Firstly, we show that our proposed algorithm provides substantial improvement in learning efficiency, making reward-free real-world training feasible. Secondly, we move beyond the simulation environments and evaluate the algorithm on real physical hardware. On quadrupeds, we observe that locomotion skills with diverse gaits and different orientations emerge without any rewards or demonstrations. We also demonstrate that the learned skills can be composed using model predictive control for goal-oriented navigation, without any additional training.
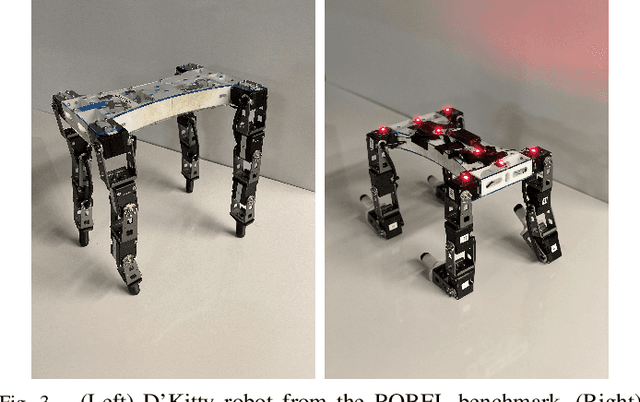
ROBEL: Robotics Benchmarks for Learning with Low-Cost Robots
Sep 25, 2019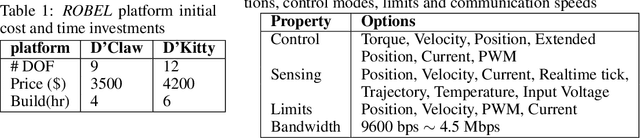
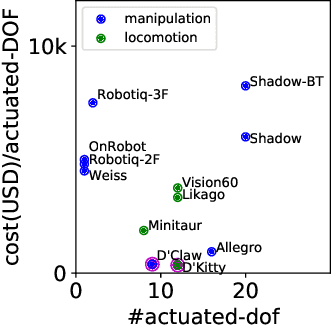
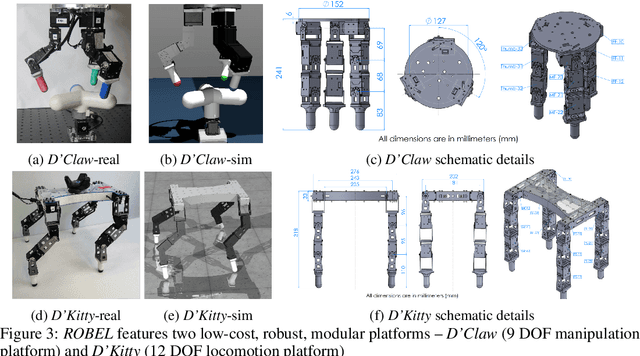
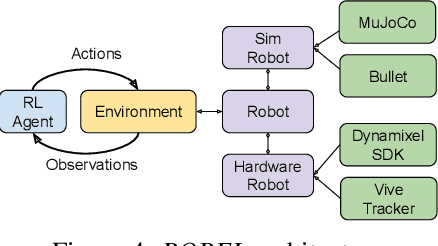
ROBEL is an open-source platform of cost-effective robots designed for reinforcement learning in the real world. ROBEL introduces two robots, each aimed to accelerate reinforcement learning research in different task domains: D'Claw is a three-fingered hand robot that facilitates learning dexterous manipulation tasks, and D'Kitty is a four-legged robot that facilitates learning agile legged locomotion tasks. These low-cost, modular robots are easy to maintain and are robust enough to sustain on-hardware reinforcement learning from scratch with over 14000 training hours registered on them to date. To leverage this platform, we propose an extensible set of continuous control benchmark tasks for each robot. These tasks feature dense and sparse task objectives, and additionally introduce score metrics as hardware-safety. We provide benchmark scores on an initial set of tasks using a variety of learning-based methods. Furthermore, we show that these results can be replicated across copies of the robots located in different institutions. Code, documentation, design files, detailed assembly instructions, final policies, baseline details, task videos, and all supplementary materials required to reproduce the results are available at www.roboticsbenchmarks.org.
* Accepted for CoRL2019. For details visit - www.roboticsbenchmarks.org
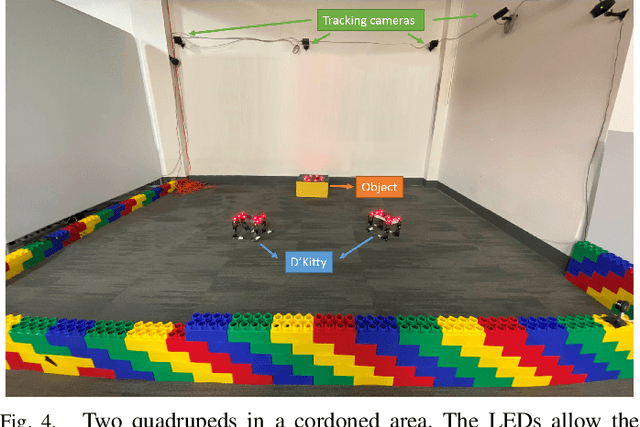
Multi-Agent Manipulation via Locomotion using Hierarchical Sim2Real
Aug 13, 2019

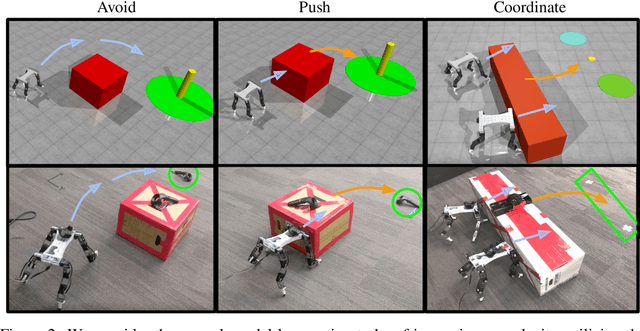

Manipulation and locomotion are closely related problems that are often studied in isolation. In this work, we study the problem of coordinating multiple mobile agents to exhibit manipulation behaviors using a reinforcement learning (RL) approach. Our method hinges on the use of hierarchical sim2real -- a simulated environment is used to learn low-level goal-reaching skills, which are then used as the action space for a high-level RL controller, also trained in simulation. The full hierarchical policy is then transferred to the real world in a zero-shot fashion. The application of domain randomization during training enables the learned behaviors to generalize to real-world settings, while the use of hierarchy provides a modular paradigm for learning and transferring increasingly complex behaviors. We evaluate our method on a number of real-world tasks, including coordinated object manipulation in a multi-agent setting. See videos at https://sites.google.com/view/manipulation-via-locomotion