 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFauna Sprout: A lightweight, approachable, developer-ready humanoid robot
Jan 26, 2026Recent advances in learned control, large-scale simulation, and generative models have accelerated progress toward general-purpose robotic controllers, yet the field still lacks platforms suitable for safe, expressive, long-term deployment in human environments. Most existing humanoids are either closed industrial systems or academic prototypes that are difficult to deploy and operate around people, limiting progress in robotics. We introduce Sprout, a developer platform designed to address these limitations through an emphasis on safety, expressivity, and developer accessibility. Sprout adopts a lightweight form factor with compliant control, limited joint torques, and soft exteriors to support safe operation in shared human spaces. The platform integrates whole-body control, manipulation with integrated grippers, and virtual-reality-based teleoperation within a unified hardware-software stack. An expressive head further enables social interaction -- a domain that remains underexplored on most utilitarian humanoids. By lowering physical and technical barriers to deployment, Sprout expands access to capable humanoid platforms and provides a practical basis for developing embodied intelligence in real human environments.
ROBEL: Robotics Benchmarks for Learning with Low-Cost Robots
Sep 25, 2019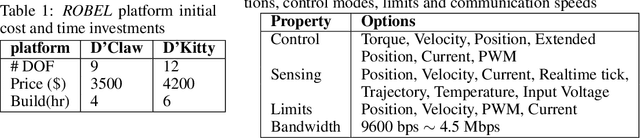
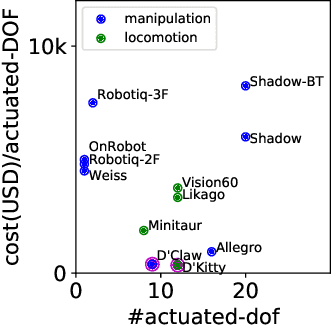
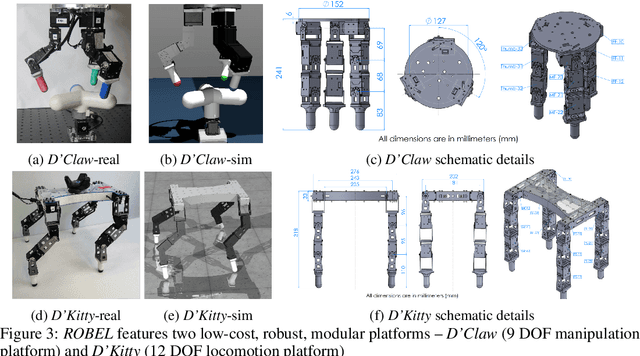
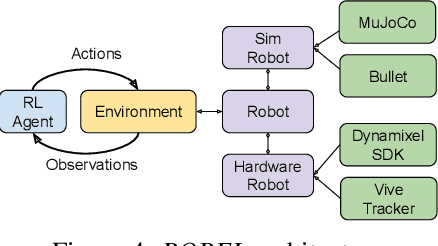
ROBEL is an open-source platform of cost-effective robots designed for reinforcement learning in the real world. ROBEL introduces two robots, each aimed to accelerate reinforcement learning research in different task domains: D'Claw is a three-fingered hand robot that facilitates learning dexterous manipulation tasks, and D'Kitty is a four-legged robot that facilitates learning agile legged locomotion tasks. These low-cost, modular robots are easy to maintain and are robust enough to sustain on-hardware reinforcement learning from scratch with over 14000 training hours registered on them to date. To leverage this platform, we propose an extensible set of continuous control benchmark tasks for each robot. These tasks feature dense and sparse task objectives, and additionally introduce score metrics as hardware-safety. We provide benchmark scores on an initial set of tasks using a variety of learning-based methods. Furthermore, we show that these results can be replicated across copies of the robots located in different institutions. Code, documentation, design files, detailed assembly instructions, final policies, baseline details, task videos, and all supplementary materials required to reproduce the results are available at www.roboticsbenchmarks.org.
* Accepted for CoRL2019. For details visit - www.roboticsbenchmarks.org
Multi-Agent Manipulation via Locomotion using Hierarchical Sim2Real
Aug 13, 2019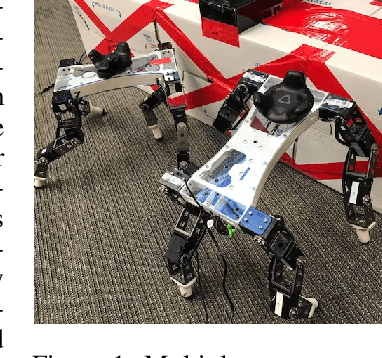

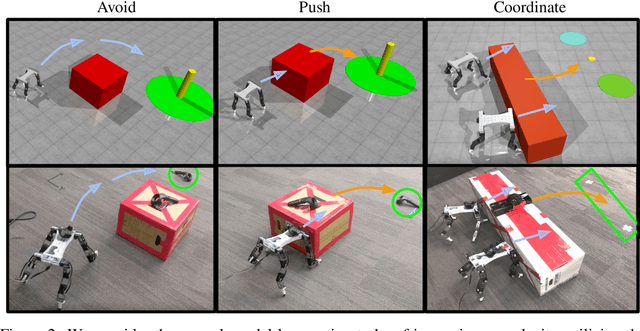

Manipulation and locomotion are closely related problems that are often studied in isolation. In this work, we study the problem of coordinating multiple mobile agents to exhibit manipulation behaviors using a reinforcement learning (RL) approach. Our method hinges on the use of hierarchical sim2real -- a simulated environment is used to learn low-level goal-reaching skills, which are then used as the action space for a high-level RL controller, also trained in simulation. The full hierarchical policy is then transferred to the real world in a zero-shot fashion. The application of domain randomization during training enables the learned behaviors to generalize to real-world settings, while the use of hierarchy provides a modular paradigm for learning and transferring increasingly complex behaviors. We evaluate our method on a number of real-world tasks, including coordinated object manipulation in a multi-agent setting. See videos at https://sites.google.com/view/manipulation-via-locomotion