 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSMentor: Enhancing Data Science Agents with Curriculum Learning and Online Knowledge Accumulation
May 20, 2025Large language model (LLM) agents have shown promising performance in generating code for solving complex data science problems. Recent studies primarily focus on enhancing in-context learning through improved search, sampling, and planning techniques, while overlooking the importance of the order in which problems are tackled during inference. In this work, we develop a novel inference-time optimization framework, referred to as DSMentor, which leverages curriculum learning -- a strategy that introduces simpler task first and progressively moves to more complex ones as the learner improves -- to enhance LLM agent performance in challenging data science tasks. Our mentor-guided framework organizes data science tasks in order of increasing difficulty and incorporates a growing long-term memory to retain prior experiences, guiding the agent's learning progression and enabling more effective utilization of accumulated knowledge. We evaluate DSMentor through extensive experiments on DSEval and QRData benchmarks. Experiments show that DSMentor using Claude-3.5-Sonnet improves the pass rate by up to 5.2% on DSEval and QRData compared to baseline agents. Furthermore, DSMentor demonstrates stronger causal reasoning ability, improving the pass rate by 8.8% on the causality problems compared to GPT-4 using Program-of-Thoughts prompts. Our work underscores the importance of developing effective strategies for accumulating and utilizing knowledge during inference, mirroring the human learning process and opening new avenues for improving LLM performance through curriculum-based inference optimization.
Benchmarking Diverse-Modal Entity Linking with Generative Models
May 27, 2023Entities can be expressed in diverse formats, such as texts, images, or column names and cell values in tables. While existing entity linking (EL) models work well on per modality configuration, such as text-only EL, visual grounding, or schema linking, it is more challenging to design a unified model for diverse modality configurations. To bring various modality configurations together, we constructed a benchmark for diverse-modal EL (DMEL) from existing EL datasets, covering all three modalities including text, image, and table. To approach the DMEL task, we proposed a generative diverse-modal model (GDMM) following a multimodal-encoder-decoder paradigm. Pre-training \Model with rich corpora builds a solid foundation for DMEL without storing the entire KB for inference. Fine-tuning GDMM builds a stronger DMEL baseline, outperforming state-of-the-art task-specific EL models by 8.51 F1 score on average. Additionally, extensive error analyses are conducted to highlight the challenges of DMEL, facilitating future research on this task.
STREET: A Multi-Task Structured Reasoning and Explanation Benchmark
Feb 13, 2023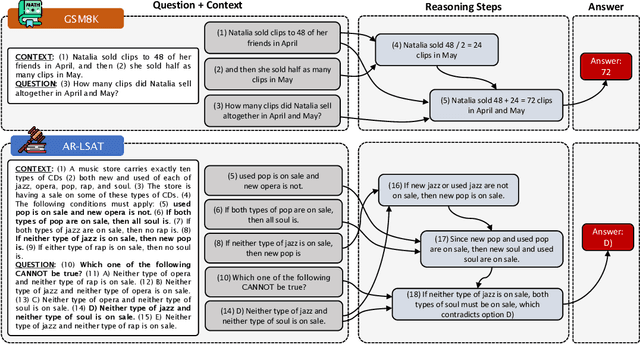
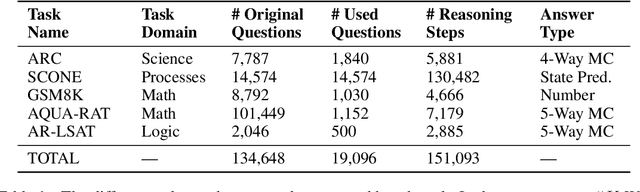
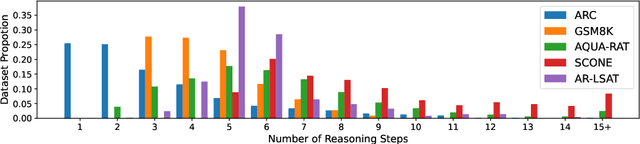
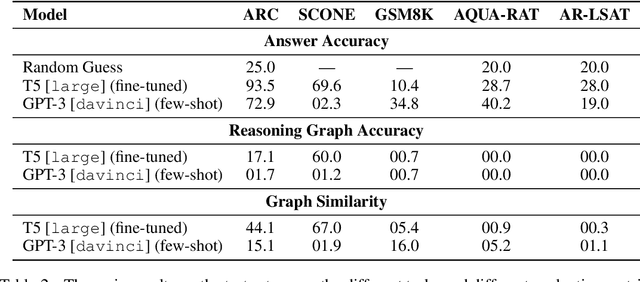
We introduce STREET, a unified multi-task and multi-domain natural language reasoning and explanation benchmark. Unlike most existing question-answering (QA) datasets, we expect models to not only answer questions, but also produce step-by-step structured explanations describing how premises in the question are used to produce intermediate conclusions that can prove the correctness of a certain answer. We perform extensive evaluation with popular language models such as few-shot prompting GPT-3 and fine-tuned T5. We find that these models still lag behind human performance when producing such structured reasoning steps. We believe this work will provide a way for the community to better train and test systems on multi-step reasoning and explanations in natural language.
Importance of Synthesizing High-quality Data for Text-to-SQL Parsing
Dec 17, 2022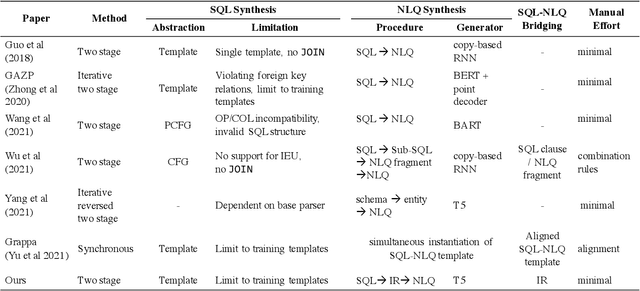
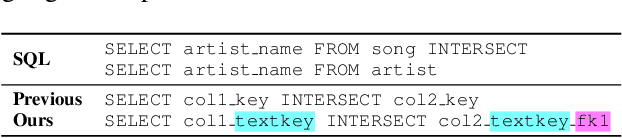
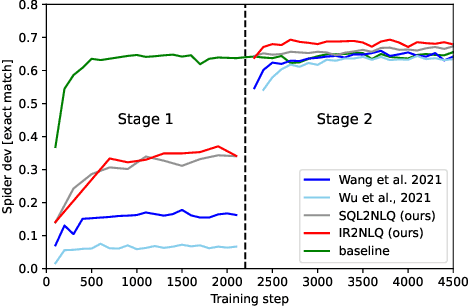
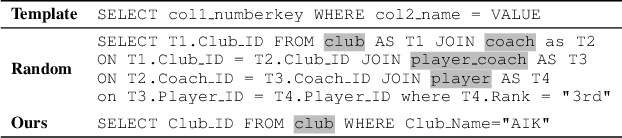
Recently, there has been increasing interest in synthesizing data to improve downstream text-to-SQL tasks. In this paper, we first examined the existing synthesized datasets and discovered that state-of-the-art text-to-SQL algorithms did not further improve on popular benchmarks when trained with augmented synthetic data. We observed two shortcomings: illogical synthetic SQL queries from independent column sampling and arbitrary table joins. To address these issues, we propose a novel synthesis framework that incorporates key relationships from schema, imposes strong typing, and conducts schema-distance-weighted column sampling. We also adopt an intermediate representation (IR) for the SQL-to-text task to further improve the quality of the generated natural language questions. When existing powerful semantic parsers are pre-finetuned on our high-quality synthesized data, our experiments show that these models have significant accuracy boosts on popular benchmarks, including new state-of-the-art performance on Spider.
Entailment Tree Explanations via Iterative Retrieval-Generation Reasoner
May 18, 2022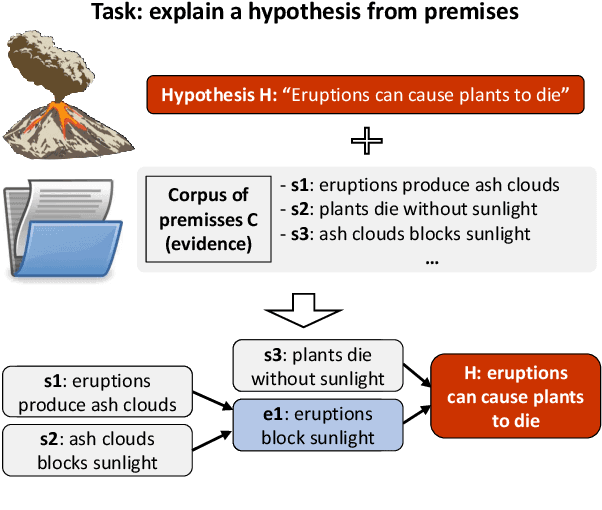
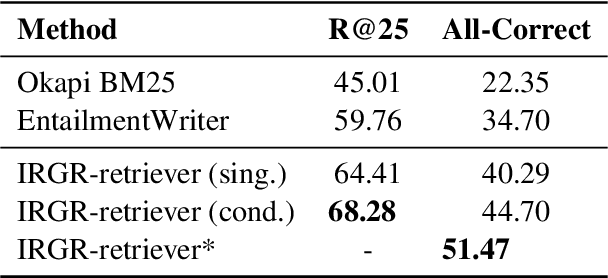
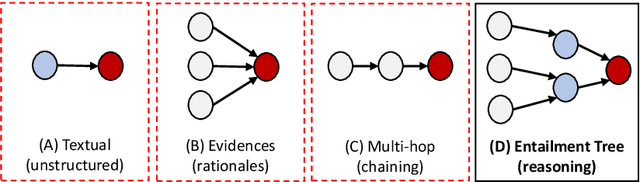
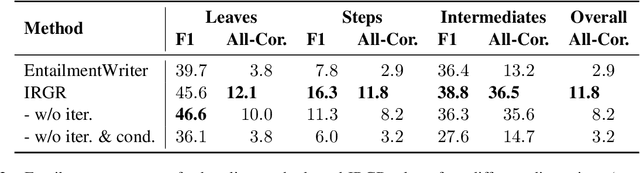
Large language models have achieved high performance on various question answering (QA) benchmarks, but the explainability of their output remains elusive. Structured explanations, called entailment trees, were recently suggested as a way to explain and inspect a QA system's answer. In order to better generate such entailment trees, we propose an architecture called Iterative Retrieval-Generation Reasoner (IRGR). Our model is able to explain a given hypothesis by systematically generating a step-by-step explanation from textual premises. The IRGR model iteratively searches for suitable premises, constructing a single entailment step at a time. Contrary to previous approaches, our method combines generation steps and retrieval of premises, allowing the model to leverage intermediate conclusions, and mitigating the input size limit of baseline encoder-decoder models. We conduct experiments using the EntailmentBank dataset, where we outperform existing benchmarks on premise retrieval and entailment tree generation, with around 300% gain in overall correctness.
End-to-End Synthetic Data Generation for Domain Adaptation of Question Answering Systems
Oct 12, 2020



We propose an end-to-end approach for synthetic QA data generation. Our model comprises a single transformer-based encoder-decoder network that is trained end-to-end to generate both answers and questions. In a nutshell, we feed a passage to the encoder and ask the decoder to generate a question and an answer token-by-token. The likelihood produced in the generation process is used as a filtering score, which avoids the need for a separate filtering model. Our generator is trained by fine-tuning a pretrained LM using maximum likelihood estimation. The experimental results indicate significant improvements in the domain adaptation of QA models outperforming current state-of-the-art methods.
The Ingredients of Real-World Robotic Reinforcement Learning
Apr 27, 2020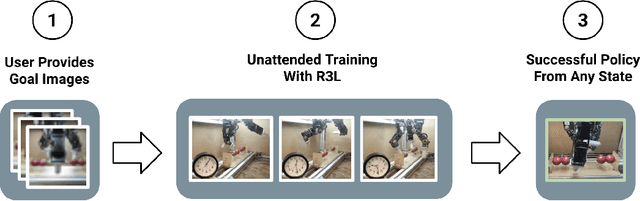
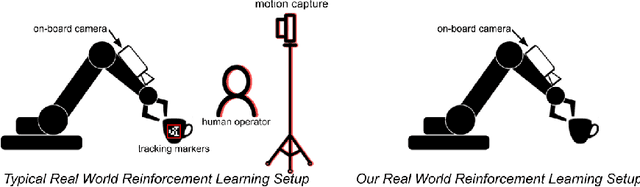
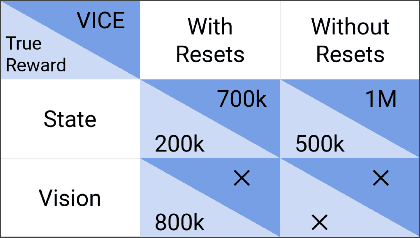
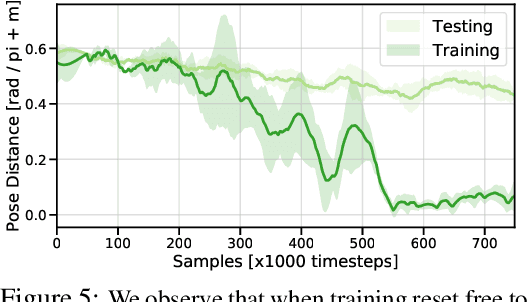
The success of reinforcement learning for real world robotics has been, in many cases limited to instrumented laboratory scenarios, often requiring arduous human effort and oversight to enable continuous learning. In this work, we discuss the elements that are needed for a robotic learning system that can continually and autonomously improve with data collected in the real world. We propose a particular instantiation of such a system, using dexterous manipulation as our case study. Subsequently, we investigate a number of challenges that come up when learning without instrumentation. In such settings, learning must be feasible without manually designed resets, using only on-board perception, and without hand-engineered reward functions. We propose simple and scalable solutions to these challenges, and then demonstrate the efficacy of our proposed system on a set of dexterous robotic manipulation tasks, providing an in-depth analysis of the challenges associated with this learning paradigm. We demonstrate that our complete system can learn without any human intervention, acquiring a variety of vision-based skills with a real-world three-fingered hand. Results and videos can be found at https://sites.google.com/view/realworld-rl/
ROBEL: Robotics Benchmarks for Learning with Low-Cost Robots
Sep 25, 2019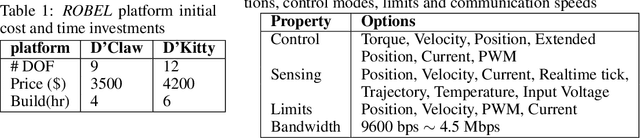
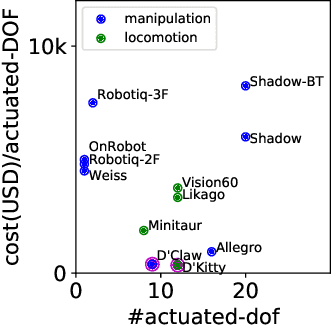
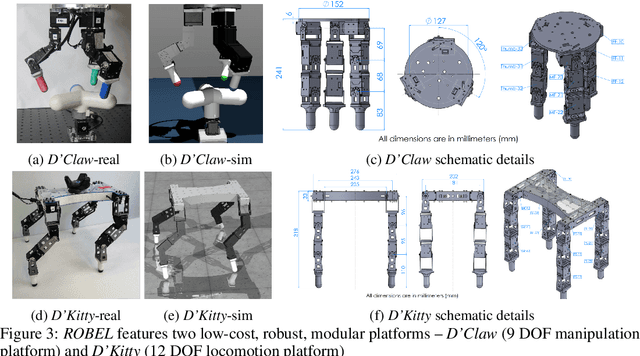
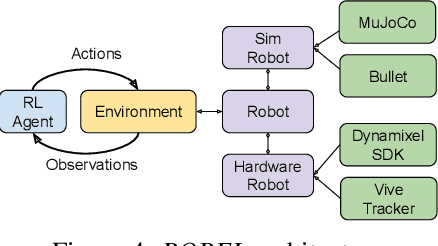
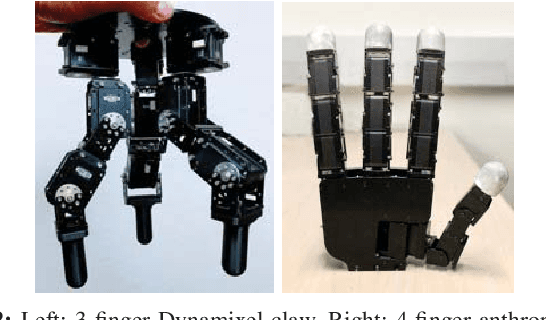
ROBEL is an open-source platform of cost-effective robots designed for reinforcement learning in the real world. ROBEL introduces two robots, each aimed to accelerate reinforcement learning research in different task domains: D'Claw is a three-fingered hand robot that facilitates learning dexterous manipulation tasks, and D'Kitty is a four-legged robot that facilitates learning agile legged locomotion tasks. These low-cost, modular robots are easy to maintain and are robust enough to sustain on-hardware reinforcement learning from scratch with over 14000 training hours registered on them to date. To leverage this platform, we propose an extensible set of continuous control benchmark tasks for each robot. These tasks feature dense and sparse task objectives, and additionally introduce score metrics as hardware-safety. We provide benchmark scores on an initial set of tasks using a variety of learning-based methods. Furthermore, we show that these results can be replicated across copies of the robots located in different institutions. Code, documentation, design files, detailed assembly instructions, final policies, baseline details, task videos, and all supplementary materials required to reproduce the results are available at www.roboticsbenchmarks.org.
* Accepted for CoRL2019. For details visit - www.roboticsbenchmarks.org
Soft Actor-Critic Algorithms and Applications
Jan 29, 2019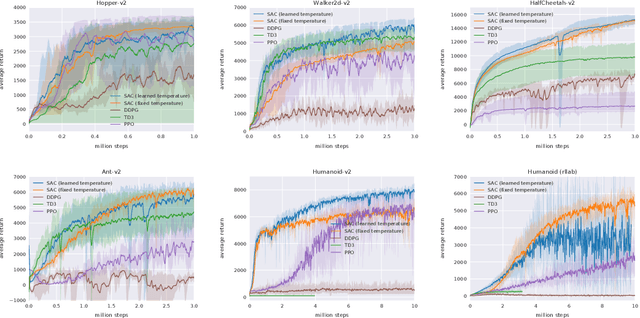
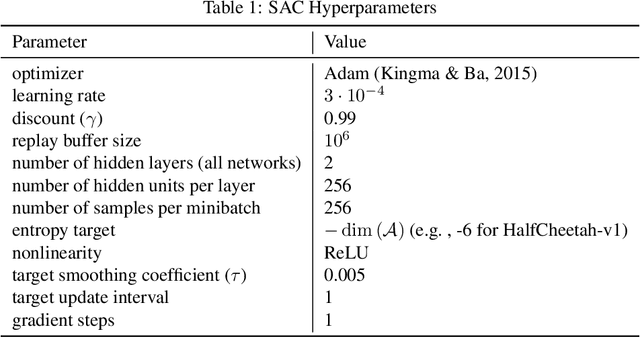
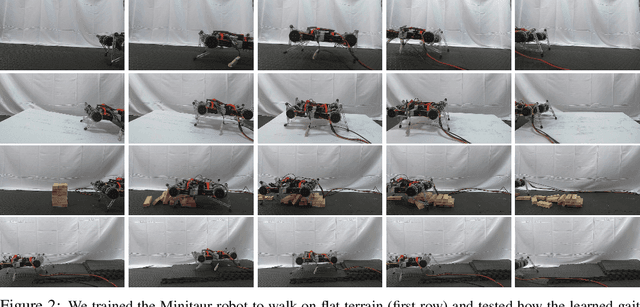
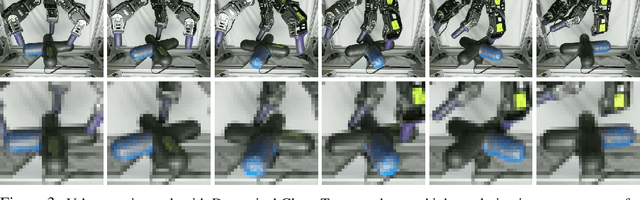
Model-free deep reinforcement learning (RL) algorithms have been successfully applied to a range of challenging sequential decision making and control tasks. However, these methods typically suffer from two major challenges: high sample complexity and brittleness to hyperparameters. Both of these challenges limit the applicability of such methods to real-world domains. In this paper, we describe Soft Actor-Critic (SAC), our recently introduced off-policy actor-critic algorithm based on the maximum entropy RL framework. In this framework, the actor aims to simultaneously maximize expected return and entropy. That is, to succeed at the task while acting as randomly as possible. We extend SAC to incorporate a number of modifications that accelerate training and improve stability with respect to the hyperparameters, including a constrained formulation that automatically tunes the temperature hyperparameter. We systematically evaluate SAC on a range of benchmark tasks, as well as real-world challenging tasks such as locomotion for a quadrupedal robot and robotic manipulation with a dexterous hand. With these improvements, SAC achieves state-of-the-art performance, outperforming prior on-policy and off-policy methods in sample-efficiency and asymptotic performance. Furthermore, we demonstrate that, in contrast to other off-policy algorithms, our approach is very stable, achieving similar performance across different random seeds. These results suggest that SAC is a promising candidate for learning in real-world robotics tasks.
Dexterous Manipulation with Deep Reinforcement Learning: Efficient, General, and Low-Cost
Oct 14, 2018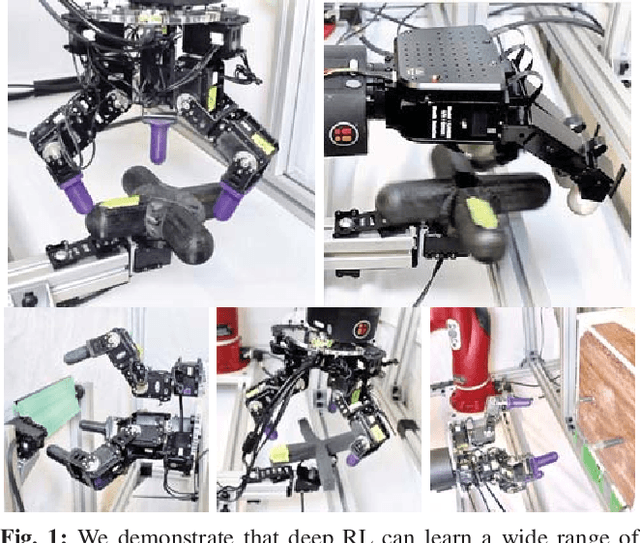


Dexterous multi-fingered robotic hands can perform a wide range of manipulation skills, making them an appealing component for general-purpose robotic manipulators. However, such hands pose a major challenge for autonomous control, due to the high dimensionality of their configuration space and complex intermittent contact interactions. In this work, we propose deep reinforcement learning (deep RL) as a scalable solution for learning complex, contact rich behaviors with multi-fingered hands. Deep RL provides an end-to-end approach to directly map sensor readings to actions, without the need for task specific models or policy classes. We show that contact-rich manipulation behavior with multi-fingered hands can be learned by directly training with model-free deep RL algorithms in the real world, with minimal additional assumption and without the aid of simulation. We learn a variety of complex behaviors on two different low-cost hardware platforms. We show that each task can be learned entirely from scratch, and further study how the learning process can be further accelerated by using a small number of human demonstrations to bootstrap learning. Our experiments demonstrate that complex multi-fingered manipulation skills can be learned in the real world in about 4-7 hours for most tasks, and that demonstrations can decrease this to 2-3 hours, indicating that direct deep RL training in the real world is a viable and practical alternative to simulation and model-based control. \url{https://sites.google.com/view/deeprl-handmanipulation}