 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Evaluation of AI Agent Security Guardrails
Apr 27, 2026This report presents a comparative evaluation of DKnownAI Guard in AI agent security scenarios, benchmarked against three competing products: AWS Bedrock Guardrails, Azure Content Safety, and Lakera Guard. Using human annotation as the ground truth, we assess each guardrail's ability to detect two categories of risks: threats to the agent itself (e.g., instruction override, indirect injection, tool abuse) and requests intended to elicit harmful content (e.g., hate speech, pornography, violence). Evaluation results demonstrate that DKnownAI Guard achieves the highest recall rate at 96.5\% and ranks first in true negative rate (TNR) at 90.4\%, delivering the best overall performance among all evaluated guardrails.
ScoutAttention: Efficient KV Cache Offloading via Layer-Ahead CPU Pre-computation for LLM Inference
Mar 28, 2026Large language models encounter critical GPU memory capacity constraints during long-context inference, where KV cache memory consumption severely limits decode batch sizes. While existing research has explored offloading KV cache to DRAM, these approaches either demand frequent GPU-CPU data transfers or impose extensive CPU computation requirements, resulting in poor GPU utilization as the system waits for I/O operations or CPU processing to complete. We propose ScoutAttention, a novel KV cache offloading framework that accelerates LLM inference through collaborative GPU-CPU attention computation. To prevent CPU computation from bottlenecking the system, ScoutAttention introduces GPU-CPU collaborative block-wise sparse attention that significantly reduces CPU load. Unlike conventional parallel computing approaches, our framework features a novel layer-ahead CPU pre-computation algorithm, enabling the CPU to initiate attention computation one layer in advance, complemented by asynchronous periodic recall mechanisms to maintain minimal CPU compute load. Experimental results demonstrate that ScoutAttention maintains accuracy within 2.4% of baseline while achieving 2.1x speedup compared to existing offloading methods.
KCLNet: Electrically Equivalence-Oriented Graph Representation Learning for Analog Circuits
Mar 25, 2026Digital circuits representation learning has made remarkable progress in the electronic design automation domain, effectively supporting critical tasks such as testability analysis and logic reasoning. However, representation learning for analog circuits remains challenging due to their continuous electrical characteristics compared to the discrete states of digital circuits. This paper presents a direct current (DC) electrically equivalent-oriented analog representation learning framework, named \textbf{KCLNet}. It comprises an asynchronous graph neural network structure with electrically-simulated message passing and a representation learning method inspired by Kirchhoff's Current Law (KCL). This method maintains the orderliness of the circuit embedding space by enforcing the equality of the sum of outgoing and incoming current embeddings at each depth, which significantly enhances the generalization ability of circuit embeddings. KCLNet offers a novel and effective solution for analog circuit representation learning with electrical constraints preserved. Experimental results demonstrate that our method achieves significant performance in a variety of downstream tasks, e.g., analog circuit classification, subcircuit detection, and circuit edit distance prediction.
Symphony: A Cognitively-Inspired Multi-Agent System for Long-Video Understanding
Mar 18, 2026Despite rapid developments and widespread applications of MLLM agents, they still struggle with long-form video understanding (LVU) tasks, which are characterized by high information density and extended temporal spans. Recent research on LVU agents demonstrates that simple task decomposition and collaboration mechanisms are insufficient for long-chain reasoning tasks. Moreover, directly reducing the time context through embedding-based retrieval may lose key information of complex problems. In this paper, we propose Symphony, a multi-agent system, to alleviate these limitations. By emulating human cognition patterns, Symphony decomposes LVU into fine-grained subtasks and incorporates a deep reasoning collaboration mechanism enhanced by reflection, effectively improving the reasoning capability. Additionally, Symphony provides a VLM-based grounding approach to analyze LVU tasks and assess the relevance of video segments, which significantly enhances the ability to locate complex problems with implicit intentions and large temporal spans. Experimental results show that Symphony achieves state-of-the-art performance on LVBench, LongVideoBench, VideoMME, and MLVU, with a 5.0% improvement over the prior state-of-the-art method on LVBench. Code is available at https://github.com/Haiyang0226/Symphony.
AerialVLA: A Vision-Language-Action Model for UAV Navigation via Minimalist End-to-End Control
Mar 15, 2026Vision-Language Navigation (VLN) for Unmanned Aerial Vehicles (UAVs) demands complex visual interpretation and continuous control in dynamic 3D environments. Existing hierarchical approaches rely on dense oracle guidance or auxiliary object detectors, creating semantic gaps and limiting genuine autonomy. We propose AerialVLA, a minimalist end-to-end Vision-Language-Action framework mapping raw visual observations and fuzzy linguistic instructions directly to continuous physical control signals. First, we introduce a streamlined dual-view perception strategy that reduces visual redundancy while preserving essential cues for forward navigation and precise grounding, which additionally facilitates future simulation-to-reality transfer. To reclaim genuine autonomy, we deploy a fuzzy directional prompting mechanism derived solely from onboard sensors, completely eliminating the dependency on dense oracle guidance. Ultimately, we formulate a unified control space that integrates continuous 3-Degree-of-Freedom (3-DoF) kinematic commands with an intrinsic landing signal, freeing the agent from external object detectors for precision landing. Extensive experiments on the TravelUAV benchmark demonstrate that AerialVLA achieves state-of-the-art performance in seen environments. Furthermore, it exhibits superior generalization in unseen scenarios by achieving nearly three times the success rate of leading baselines, validating that a minimalist, autonomy-centric paradigm captures more robust visual-motor representations than complex modular systems.
KCFRC: Kinematic Collision-Aware Foothold Reachability Criteria for Legged Locomotion
Feb 24, 2026Legged robots face significant challenges in navigating complex environments, as they require precise real-time decisions for foothold selection and contact planning. While existing research has explored methods to select footholds based on terrain geometry or kinematics, a critical gap remains: few existing methods efficiently validate the existence of a non-collision swing trajectory. This paper addresses this gap by introducing KCFRC, a novel approach for efficient foothold reachability analysis. We first formally define the foothold reachability problem and establish a sufficient condition for foothold reachability. Based on this condition, we develop the KCFRC algorithm, which enables robots to validate foothold reachability in real time. Our experimental results demonstrate that KCFRC achieves remarkable time efficiency, completing foothold reachability checks for a single leg across 900 potential footholds in an average of 2 ms. Furthermore, we show that KCFRC can accelerate trajectory optimization and is particularly beneficial for contact planning in confined spaces, enhancing the adaptability and robustness of legged robots in challenging environments.
TokenMixer-Large: Scaling Up Large Ranking Models in Industrial Recommenders
Feb 06, 2026In recent years, the study of scaling laws for large recommendation models has gradually gained attention. Works such as Wukong, HiFormer, and DHEN have attempted to increase the complexity of interaction structures in ranking models and validate scaling laws between performance and parameters/FLOPs by stacking multiple layers. However, their experimental scale remains relatively limited. Our previous work introduced the TokenMixer architecture, an efficient variant of the standard Transformer where the self-attention mechanism is replaced by a simple reshape operation, and the feed-forward network is adapted to a pertoken FFN. The effectiveness of this architecture was demonstrated in the ranking stage by the model presented in the RankMixer paper. However, this foundational TokenMixer architecture itself has several design limitations. In this paper, we propose TokenMixer-Large, which systematically addresses these core issues: sub-optimal residual design, insufficient gradient updates in deep models, incomplete MoE sparsification, and limited exploration of scalability. By leveraging a mixing-and-reverting operation, inter-layer residuals, the auxiliary loss and a novel Sparse-Pertoken MoE architecture, TokenMixer-Large successfully scales its parameters to 7-billion and 15-billion on online traffic and offline experiments, respectively. Currently deployed in multiple scenarios at ByteDance, TokenMixer -Large has achieved significant offline and online performance gains.
SPECTRE: Spectral Pre-training Embeddings with Cylindrical Temporal Rotary Position Encoding for Fine-Grained sEMG-Based Movement Decoding
Dec 27, 2025Decoding fine-grained movement from non-invasive surface Electromyography (sEMG) is a challenge for prosthetic control due to signal non-stationarity and low signal-to-noise ratios. Generic self-supervised learning (SSL) frameworks often yield suboptimal results on sEMG as they attempt to reconstruct noisy raw signals and lack the inductive bias to model the cylindrical topology of electrode arrays. To overcome these limitations, we introduce SPECTRE, a domain-specific SSL framework. SPECTRE features two primary contributions: a physiologically-grounded pre-training task and a novel positional encoding. The pre-training involves masked prediction of discrete pseudo-labels from clustered Short-Time Fourier Transform (STFT) representations, compelling the model to learn robust, physiologically relevant frequency patterns. Additionally, our Cylindrical Rotary Position Embedding (CyRoPE) factorizes embeddings along linear temporal and annular spatial dimensions, explicitly modeling the forearm sensor topology to capture muscle synergies. Evaluations on multiple datasets, including challenging data from individuals with amputation, demonstrate that SPECTRE establishes a new state-of-the-art for movement decoding, significantly outperforming both supervised baselines and generic SSL approaches. Ablation studies validate the critical roles of both spectral pre-training and CyRoPE. SPECTRE provides a robust foundation for practical myoelectric interfaces capable of handling real-world sEMG complexities.
LEMUR: Large scale End-to-end MUltimodal Recommendation
Nov 17, 2025Traditional ID-based recommender systems often struggle with cold-start and generalization challenges. Multimodal recommendation systems, which leverage textual and visual data, offer a promising solution to mitigate these issues. However, existing industrial approaches typically adopt a two-stage training paradigm: first pretraining a multimodal model, then applying its frozen representations to train the recommendation model. This decoupled framework suffers from misalignment between multimodal learning and recommendation objectives, as well as an inability to adapt dynamically to new data. To address these limitations, we propose LEMUR, the first large-scale multimodal recommender system trained end-to-end from raw data. By jointly optimizing both the multimodal and recommendation components, LEMUR ensures tighter alignment with downstream objectives while enabling real-time parameter updates. Constructing multimodal sequential representations from user history often entails prohibitively high computational costs. To alleviate this bottleneck, we propose a novel memory bank mechanism that incrementally accumulates historical multimodal representations throughout the training process. After one month of deployment in Douyin Search, LEMUR has led to a 0.843% reduction in query change rate decay and a 0.81% improvement in QAUC. Additionally, LEMUR has shown significant gains across key offline metrics for Douyin Advertisement. Our results validate the superiority of end-to-end multimodal recommendation in real-world industrial scenarios.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
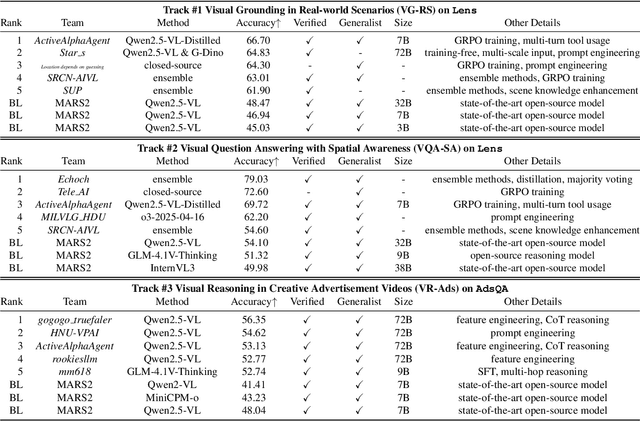

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.