 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmotion-Director: Bridging Affective Shortcut in Emotion-Oriented Image Generation
Dec 22, 2025Image generation based on diffusion models has demonstrated impressive capability, motivating exploration into diverse and specialized applications. Owing to the importance of emotion in advertising, emotion-oriented image generation has attracted increasing attention. However, current emotion-oriented methods suffer from an affective shortcut, where emotions are approximated to semantics. As evidenced by two decades of research, emotion is not equivalent to semantics. To this end, we propose Emotion-Director, a cross-modal collaboration framework consisting of two modules. First, we propose a cross-Modal Collaborative diffusion model, abbreviated as MC-Diffusion. MC-Diffusion integrates visual prompts with textual prompts for guidance, enabling the generation of emotion-oriented images beyond semantics. Further, we improve the DPO optimization by a negative visual prompt, enhancing the model's sensitivity to different emotions under the same semantics. Second, we propose MC-Agent, a cross-Modal Collaborative Agent system that rewrites textual prompts to express the intended emotions. To avoid template-like rewrites, MC-Agent employs multi-agents to simulate human subjectivity toward emotions, and adopts a chain-of-concept workflow that improves the visual expressiveness of the rewritten prompts. Extensive qualitative and quantitative experiments demonstrate the superiority of Emotion-Director in emotion-oriented image generation.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
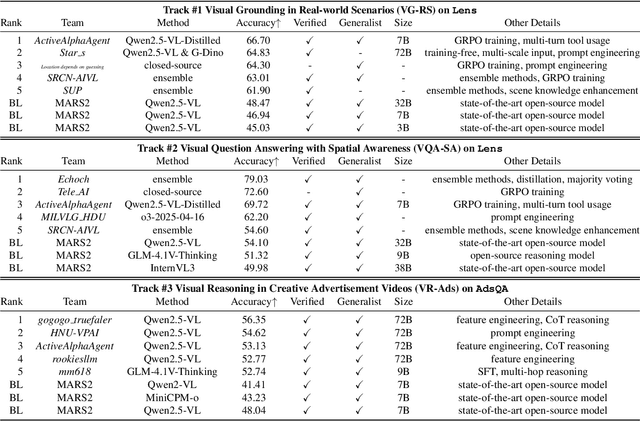

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
Sensitivity-LoRA: Low-Load Sensitivity-Based Fine-Tuning for Large Language Models
Sep 11, 2025Large Language Models (LLMs) have transformed both everyday life and scientific research. However, adapting LLMs from general-purpose models to specialized tasks remains challenging, particularly in resource-constrained environments. Low-Rank Adaptation (LoRA), a prominent method within Parameter-Efficient Fine-Tuning (PEFT), has emerged as a promising approach to LLMs by approximating model weight updates using low-rank decomposition. However, LoRA is limited by its uniform rank ( r ) allocation to each incremental matrix, and existing rank allocation techniques aimed at addressing this issue remain computationally inefficient, complex, and unstable, hindering practical applications. To address these limitations, we propose Sensitivity-LoRA, an efficient fine-tuning method that dynamically allocates ranks to weight matrices based on both their global and local sensitivities. It leverages the second-order derivatives (Hessian Matrix) of the loss function to effectively capture weight sensitivity, enabling optimal rank allocation with minimal computational overhead. Our experimental results have demonstrated robust effectiveness, efficiency and stability of Sensitivity-LoRA across diverse tasks and benchmarks.
AdsQA: Towards Advertisement Video Understanding
Sep 10, 2025Large language models (LLMs) have taken a great step towards AGI. Meanwhile, an increasing number of domain-specific problems such as math and programming boost these general-purpose models to continuously evolve via learning deeper expertise. Now is thus the time further to extend the diversity of specialized applications for knowledgeable LLMs, though collecting high quality data with unexpected and informative tasks is challenging. In this paper, we propose to use advertisement (ad) videos as a challenging test-bed to probe the ability of LLMs in perceiving beyond the objective physical content of common visual domain. Our motivation is to take full advantage of the clue-rich and information-dense ad videos' traits, e.g., marketing logic, persuasive strategies, and audience engagement. Our contribution is three-fold: (1) To our knowledge, this is the first attempt to use ad videos with well-designed tasks to evaluate LLMs. We contribute AdsQA, a challenging ad Video QA benchmark derived from 1,544 ad videos with 10,962 clips, totaling 22.7 hours, providing 5 challenging tasks. (2) We propose ReAd-R, a Deepseek-R1 styled RL model that reflects on questions, and generates answers via reward-driven optimization. (3) We benchmark 14 top-tier LLMs on AdsQA, and our \texttt{ReAd-R}~achieves the state-of-the-art outperforming strong competitors equipped with long-chain reasoning capabilities by a clear margin.
A Survey of Reinforcement Learning for Large Reasoning Models
Sep 10, 2025In this paper, we survey recent advances in Reinforcement Learning (RL) for reasoning with Large Language Models (LLMs). RL has achieved remarkable success in advancing the frontier of LLM capabilities, particularly in addressing complex logical tasks such as mathematics and coding. As a result, RL has emerged as a foundational methodology for transforming LLMs into LRMs. With the rapid progress of the field, further scaling of RL for LRMs now faces foundational challenges not only in computational resources but also in algorithm design, training data, and infrastructure. To this end, it is timely to revisit the development of this domain, reassess its trajectory, and explore strategies to enhance the scalability of RL toward Artificial SuperIntelligence (ASI). In particular, we examine research applying RL to LLMs and LRMs for reasoning abilities, especially since the release of DeepSeek-R1, including foundational components, core problems, training resources, and downstream applications, to identify future opportunities and directions for this rapidly evolving area. We hope this review will promote future research on RL for broader reasoning models. Github: https://github.com/TsinghuaC3I/Awesome-RL-for-LRMs
ReviewRL: Towards Automated Scientific Review with RL
Aug 14, 2025Peer review is essential for scientific progress but faces growing challenges due to increasing submission volumes and reviewer fatigue. Existing automated review approaches struggle with factual accuracy, rating consistency, and analytical depth, often generating superficial or generic feedback lacking the insights characteristic of high-quality human reviews. We introduce ReviewRL, a reinforcement learning framework for generating comprehensive and factually grounded scientific paper reviews. Our approach combines: (1) an ArXiv-MCP retrieval-augmented context generation pipeline that incorporates relevant scientific literature, (2) supervised fine-tuning that establishes foundational reviewing capabilities, and (3) a reinforcement learning procedure with a composite reward function that jointly enhances review quality and rating accuracy. Experiments on ICLR 2025 papers demonstrate that ReviewRL significantly outperforms existing methods across both rule-based metrics and model-based quality assessments. ReviewRL establishes a foundational framework for RL-driven automatic critique generation in scientific discovery, demonstrating promising potential for future development in this domain. The implementation of ReviewRL will be released at GitHub.
ICM-Fusion: In-Context Meta-Optimized LoRA Fusion for Multi-Task Adaptation
Aug 06, 2025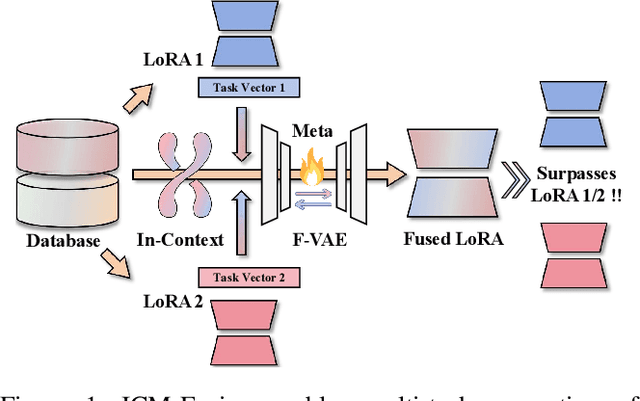
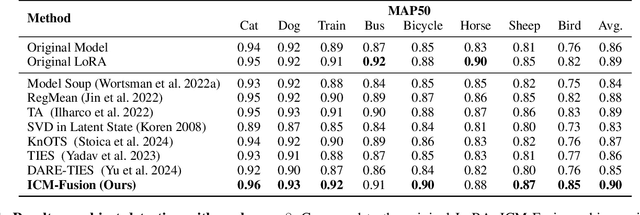
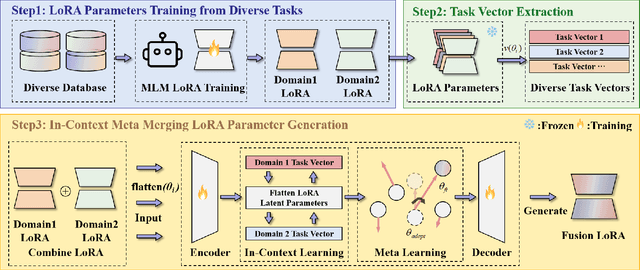
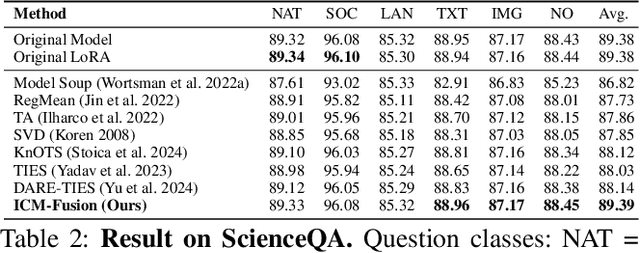
Enabling multi-task adaptation in pre-trained Low-Rank Adaptation (LoRA) models is crucial for enhancing their generalization capabilities. Most existing pre-trained LoRA fusion methods decompose weight matrices, sharing similar parameters while merging divergent ones. However, this paradigm inevitably induces inter-weight conflicts and leads to catastrophic domain forgetting. While incremental learning enables adaptation to multiple tasks, it struggles to achieve generalization in few-shot scenarios. Consequently, when the weight data follows a long-tailed distribution, it can lead to forgetting in the fused weights. To address this issue, we propose In-Context Meta LoRA Fusion (ICM-Fusion), a novel framework that synergizes meta-learning with in-context adaptation. The key innovation lies in our task vector arithmetic, which dynamically balances conflicting optimization directions across domains through learned manifold projections. ICM-Fusion obtains the optimal task vector orientation for the fused model in the latent space by adjusting the orientation of the task vectors. Subsequently, the fused LoRA is reconstructed by a self-designed Fusion VAE (F-VAE) to realize multi-task LoRA generation. We have conducted extensive experiments on visual and linguistic tasks, and the experimental results demonstrate that ICM-Fusion can be adapted to a wide range of architectural models and applied to various tasks. Compared to the current pre-trained LoRA fusion method, ICM-Fusion fused LoRA can significantly reduce the multi-tasking loss and can even achieve task enhancement in few-shot scenarios.
LENS: Multi-level Evaluation of Multimodal Reasoning with Large Language Models
May 21, 2025Multimodal Large Language Models (MLLMs) have achieved significant advances in integrating visual and linguistic information, yet their ability to reason about complex and real-world scenarios remains limited. The existing benchmarks are usually constructed in the task-oriented manner without guarantee that different task samples come from the same data distribution, thus they often fall short in evaluating the synergistic effects of lower-level perceptual capabilities on higher-order reasoning. To lift this limitation, we contribute Lens, a multi-level benchmark with 3.4K contemporary images and 60K+ human-authored questions covering eight tasks and 12 daily scenarios, forming three progressive task tiers, i.e., perception, understanding, and reasoning. One feature is that each image is equipped with rich annotations for all tasks. Thus, this dataset intrinsically supports to evaluate MLLMs to handle image-invariable prompts, from basic perception to compositional reasoning. In addition, our images are manully collected from the social media, in which 53% were published later than Jan. 2025. We evaluate 15+ frontier MLLMs such as Qwen2.5-VL-72B, InternVL3-78B, GPT-4o and two reasoning models QVQ-72B-preview and Kimi-VL. These models are released later than Dec. 2024, and none of them achieve an accuracy greater than 60% in the reasoning tasks. Project page: https://github.com/Lens4MLLMs/lens. ICCV 2025 workshop page: https://lens4mllms.github.io/mars2-workshop-iccv2025/
EventVAD: Training-Free Event-Aware Video Anomaly Detection
Apr 17, 2025Video Anomaly Detection~(VAD) focuses on identifying anomalies within videos. Supervised methods require an amount of in-domain training data and often struggle to generalize to unseen anomalies. In contrast, training-free methods leverage the intrinsic world knowledge of large language models (LLMs) to detect anomalies but face challenges in localizing fine-grained visual transitions and diverse events. Therefore, we propose EventVAD, an event-aware video anomaly detection framework that combines tailored dynamic graph architectures and multimodal LLMs through temporal-event reasoning. Specifically, EventVAD first employs dynamic spatiotemporal graph modeling with time-decay constraints to capture event-aware video features. Then, it performs adaptive noise filtering and uses signal ratio thresholding to detect event boundaries via unsupervised statistical features. The statistical boundary detection module reduces the complexity of processing long videos for MLLMs and improves their temporal reasoning through event consistency. Finally, it utilizes a hierarchical prompting strategy to guide MLLMs in performing reasoning before determining final decisions. We conducted extensive experiments on the UCF-Crime and XD-Violence datasets. The results demonstrate that EventVAD with a 7B MLLM achieves state-of-the-art (SOTA) in training-free settings, outperforming strong baselines that use 7B or larger MLLMs.
Technologies on Effectiveness and Efficiency: A Survey of State Spaces Models
Mar 14, 2025



State Space Models (SSMs) have emerged as a promising alternative to the popular transformer-based models and have been increasingly gaining attention. Compared to transformers, SSMs excel at tasks with sequential data or longer contexts, demonstrating comparable performances with significant efficiency gains. In this survey, we provide a coherent and systematic overview for SSMs, including their theoretical motivations, mathematical formulations, comparison with existing model classes, and various applications. We divide the SSM series into three main sections, providing a detailed introduction to the original SSM, the structured SSM represented by S4, and the selective SSM typified by Mamba. We put an emphasis on technicality, and highlight the various key techniques introduced to address the effectiveness and efficiency of SSMs. We hope this manuscript serves as an introduction for researchers to explore the theoretical foundations of SSMs.